自動キャリブレーション
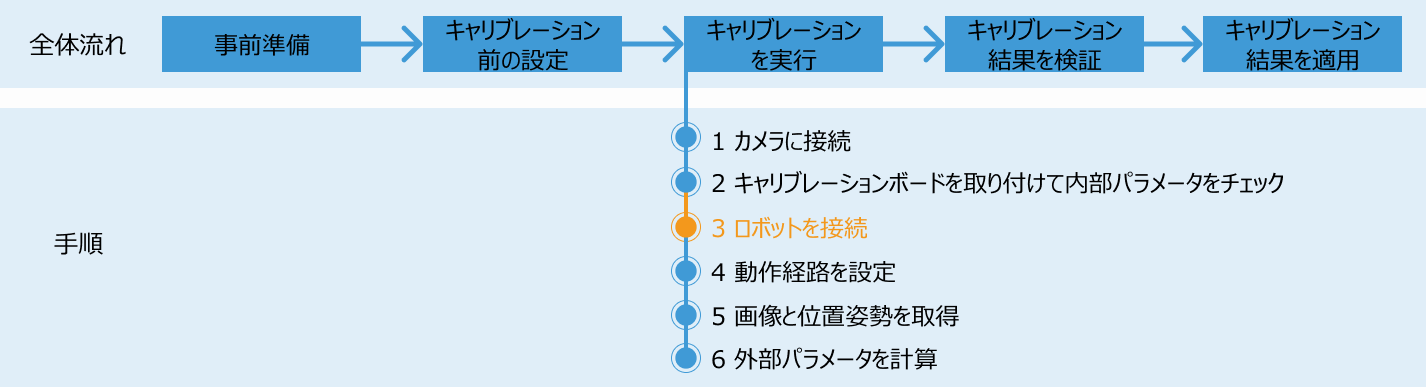
標準インターフェース通信設定が完了した後、ロボットを接続して自動キャリブレーションを行うことができます。自動キャリブレーションは、下図のようなフローで行います。
注意事項
キャリブレーションを実行する際に、ロボットを接続し、Mech-Visionソフトウェア画面に ロボットとの接続を待機中… が表示された場合、本文に記載された手順に従い、ロボット側で操作を行ってください。操作が完了した後、Mech-Visionソフトウェアで残りの手順を続けて実行してください。
|
1. キャリブレーションプログラムの選択と変更
-
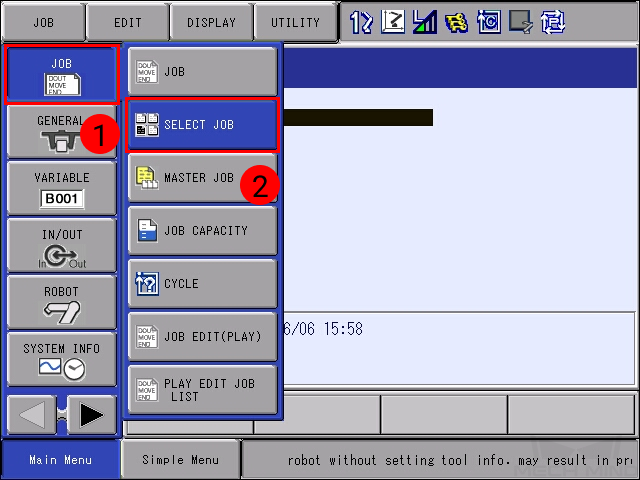
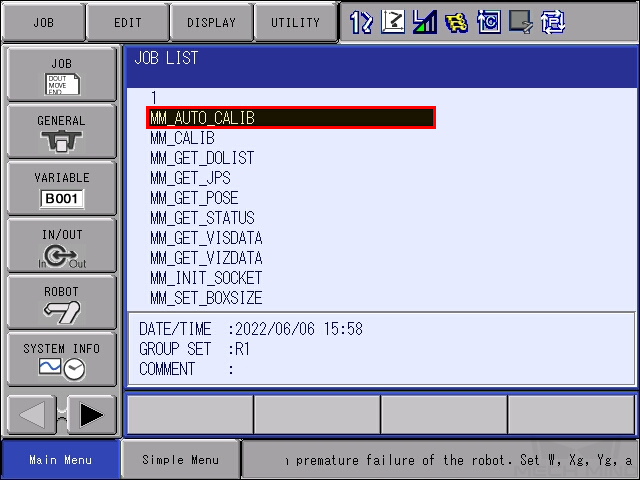
ロボットをティーチモードに切り替え、 をクリックします。カーソルを MM_AUTO_CALIB に移動させます。
-
そのプログラムファイルを選択した後、ティーチペンダントの SELECT を押して、以下の画面に進みます。
-
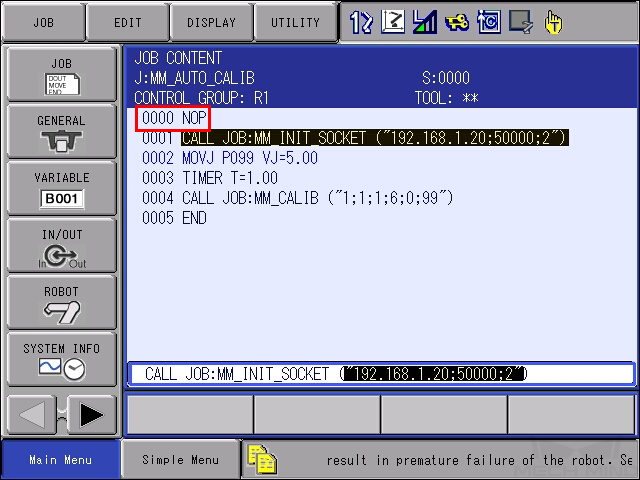
0001行の内容を選択し、右下に表示された内容でIPアドレスおよびポート番号を選択し、ENTER キーを押して変更画面に入ります。
-
IPアドレスをIPCのIPアドレスに変更します。Mech-Visionでのホストのポート番号が変更された場合、ここでの50000というポート番号もMech-Visionで設定されたポート番号と一致するように変更する必要があります。変更が完了したら、ティーチペンダントの右下隅にある ENTER を2回押すことで、プログラム内容画面に戻ります。
2.キャリブレーションの初期位置を設定
-
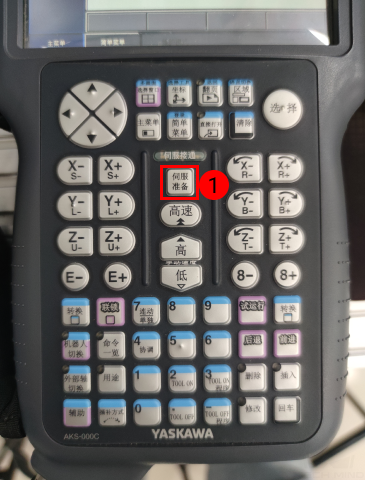
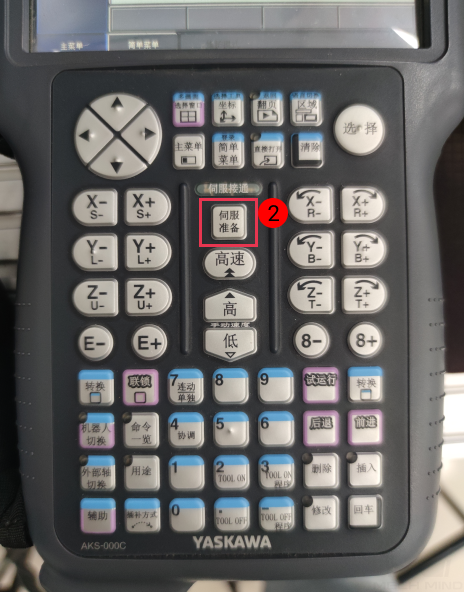
ティーチペンダントの SERVO ON READY を押した後、背面の イネーブルスイッチ を押し、手動でロボットをキャリブレーションの開始位置に移動させます。
キャリブレーションの開始点は、キャリブレーションボードの位置と点群品質を確認 する時にロボットがいた位置を選択することができます。

-
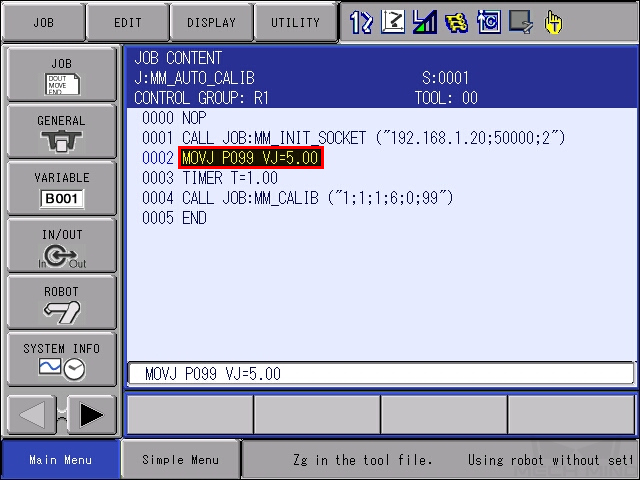
カーソルを MOVJ P099 VJ=5 に移動してから、ティーチペンダントの DIRECT OPEN を押します。
-
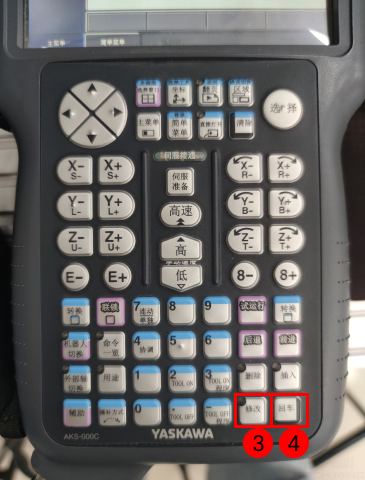
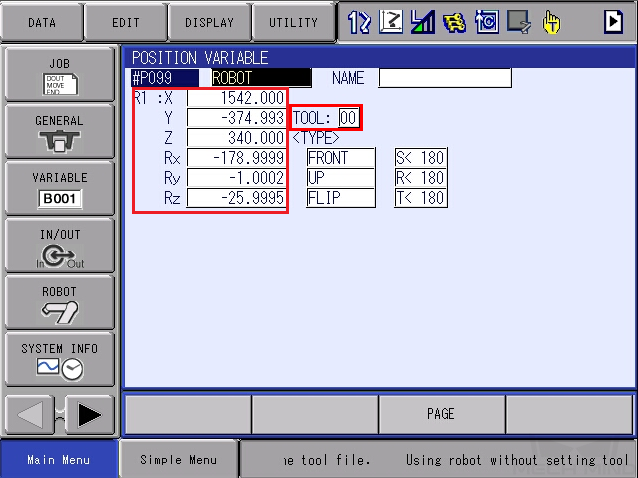
ティーチペンダントの SERVO ON READY を押した後、一方の手でティーチペンダント背面の イネーブルスイッチ を押し続け(もう一方の手の操作が完了するまで離さない)、もう一方の手で順に MODIFY と ENTER を押し、位置型変数 P099 を現在位置に変更します。その際、P099のデータ形式が ロボット となっており、ツールが 00 になっていることを確認してください。
-
P099変数がフランジ位置姿勢またはツール位置姿勢を保存する場合、P099変数のデータ形式は ロボット に設定する必要があります。
-
P099変数が関節角度を保存する場合、P099変数のデータ形式は 関節 または パルス に設定する必要があります。
-
00番目ツールのX、Y、Z、Rx、Ry、Rzの値は、事前に0に設定する必要があります。
-
-
ティーチペンダントの DIRECT OPEN キーをもう一度押すと、JOB の画面に戻ります。
3. キャリブレーションプログラムを実行
-
カーソルを最初の行に移動し、モードスイッチをPLAYモードに回し、ロボットを リピートモード に切り替えます。その後、ティーチペンダントの SERVO ON READY を押します。

速度を調整して低速で動作させる場合は、以下の手順に従って操作してください。
-
ティーチペンダント画面で を選択し、カーソルを MM_AUTO_CALIB に合わせて、ティーチペンダントの SELECT を押します。
-
を順番に選択し、下にある SPEED ADJUSTMENT を選択します。
SPEED ADJUSTMENT が選択されていない場合、その中のパラメータは変更できません。 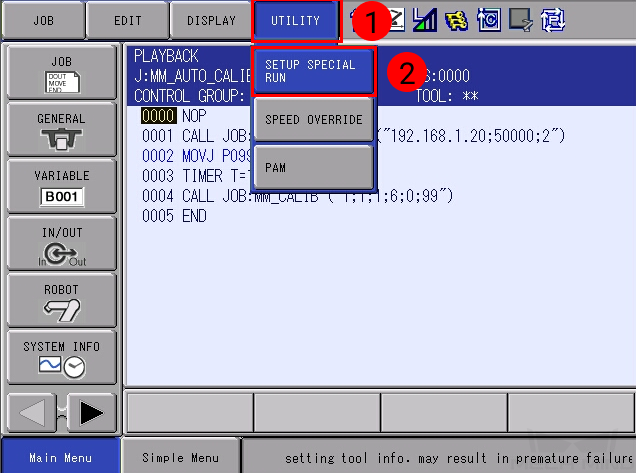
-
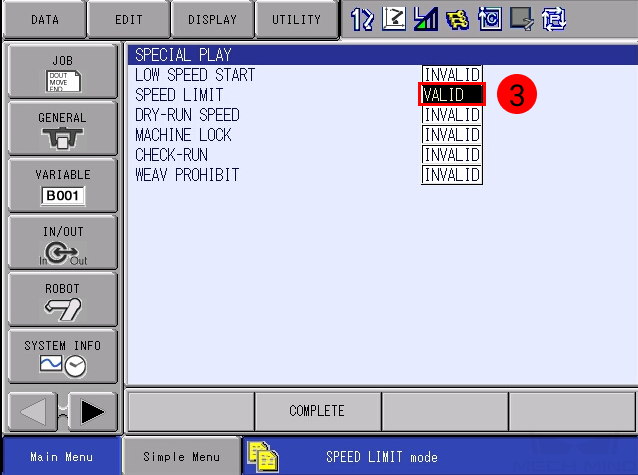
SPEED ADJUSTMENT では、OFF を選択し、ティーチペンダントの SELECT を押すと、OFF が ON に変わります。

-
その後、比率の値を調整します。「RATIO」の後の数値を選択し、ティーチペンダントの SELECT を押して、速度値調整の画面に入ります。値を入力した後、ティーチペンダントの ENTER を押して、速度の調整は完了します。

-
上記に従って速度調整が完了した後、下図のような画面が表示されます。

-
-
その後、ティーチペンダントの START キーを押します。ボタンが点灯すると、プログラムの実行が開始されます。
もし実行中に異常が発生した場合は、すぐに PAUSE または EMERGENCY STOP を押してください。 
-
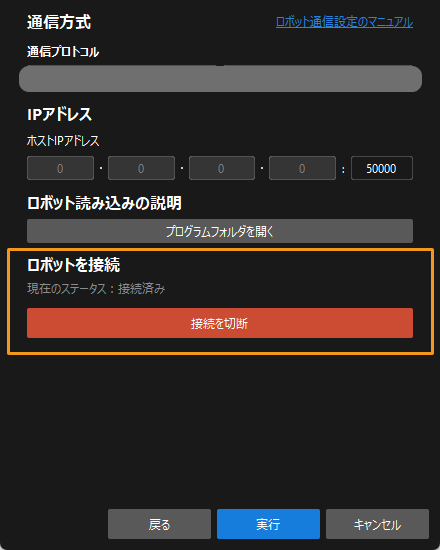
Mech-Visionの キャリブレーション 画面では、ロボットを接続 の下に「接続済み」の状態が表示され、ボタンが ロボットとの接続を待機中… から 接続を切断 に変わったら、次へ をクリックします。
-
次に、キャリブレーションを実行 の4番目の手順(動作経路を設定)および残りの設定を実行します。以下の内容をご参照ください。