YASKAWAロボットの自動キャリブレーション
以下では、YASKAWAロボットが標準インターフェースでMech-Mindビジョンシステムと通信する際に、自動キャリブレーションを実行する方法について説明します。
事前準備
キャリブレーションの事前準備はカメラの取り付け方式によって異なります。詳細については、以下の内容をご参照ください。
-
カメラの取り付け方式はEye to handの場合、 自動キャリブレーション(Eye to hand) の 事前準備 をご参照ください。
-
カメラの取り付け方式はEye in handの場合、 自動キャリブレーション(Eye in hand) の 事前準備 をご参照ください。
キャリブレーション前の設定
-
Mech-Visionを起動し、ツールバーの カメラキャリブレーション(標準モード) をクリックします。すると、 キャリブレーション前の設定 画面が表示されます。
-
キャリブレーションの実行方法を選択 画面で、 新なキャリブレーションを開始 を選択し、 次へ をクリックします。
-
キャリブレーションのタスクを選択 画面で、ドロップダウンリストから 適応可能なロボットのハンド・アイ・キャリブレーション を選択し、 ロボット型番を選択 をクリックして型番を選択してから、 次へ をクリックします。
-
カメラの取り付け方式を選択 画面では、プロジェクトに使用されているカメラの取り付け方式に応じて選択してから、 次へ をクリックします。
-
実行モードとロボットの制御方式を選択 画面で、 自動キャリブレーション と 標準インターフェース を選択してから、 次へ をクリックします。
-
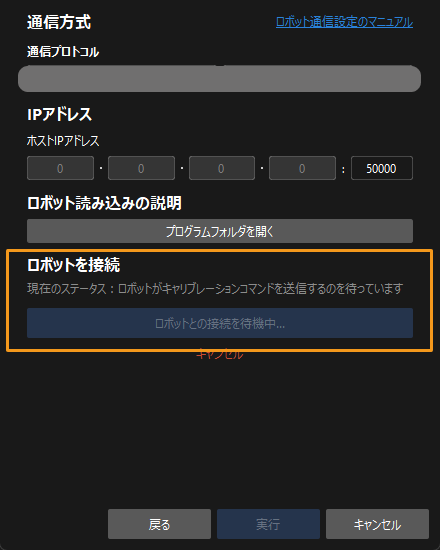
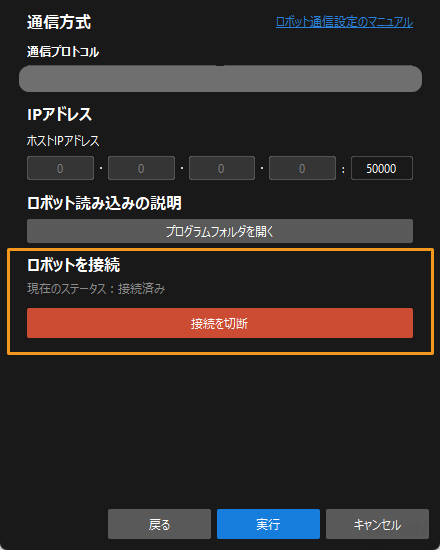
通信方式 画面では、 通信プロトコル は初期値を使用します。ロボットを接続 の下に インターフェースサービスを起動 が表示されている場合は、それをクリックすると、ボタンが ロボットとの接続を待機中… に変わります。
-
デフォルトでは、 ホストIPアドレス のポート番号は 50000 となります。50000といったポート番号を使用しない場合は、実際の状況に応じて変更してください。
-
この手順を完了した後、 キャリブレーション前の設定 画面を閉じないでください。
-
キャリブレーションするためのプログラムを開く
-
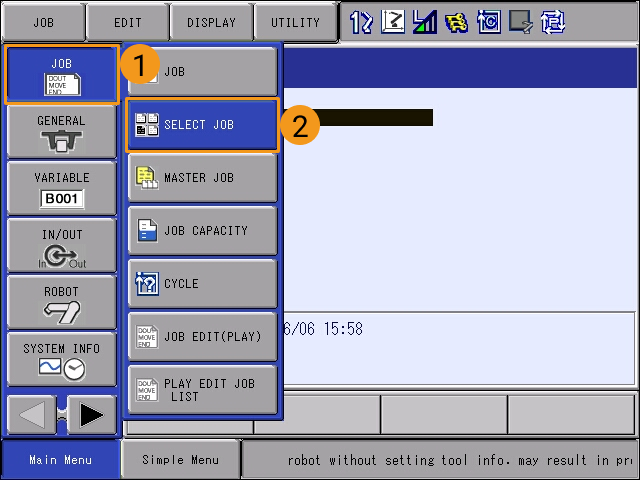
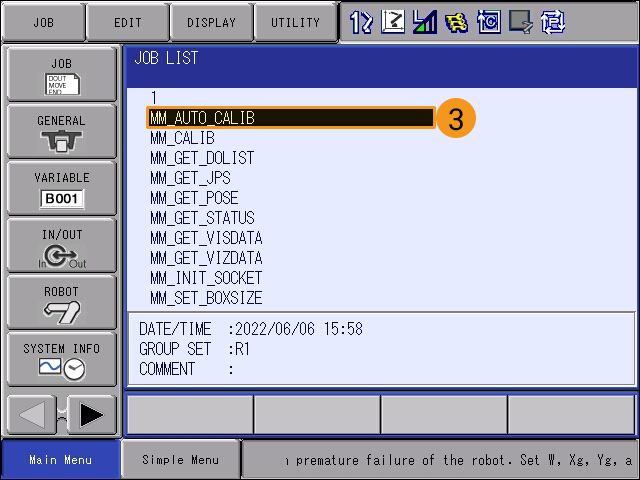
ロボットをティーチモードに切り替え、 をクリックします。カーソルを MM_AUTO_CALIB に移動させ、ティーチペンダントの SELECT キーを押します。
-
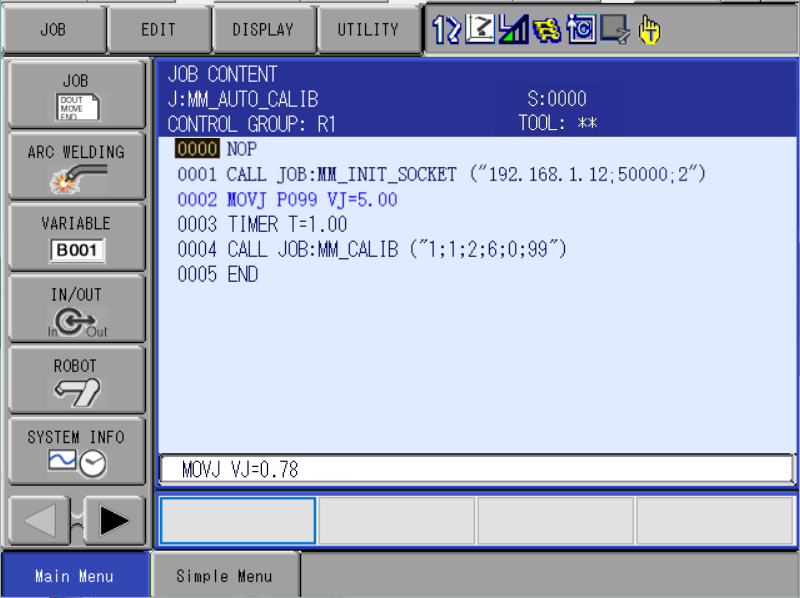
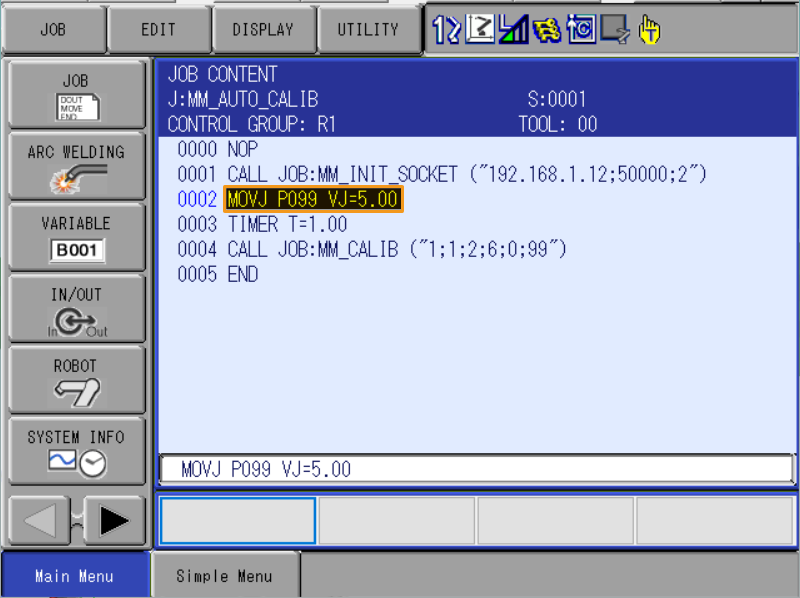
プログラムを選択した後、以下のような画面が表示されます。
キャリブレーションの初期位置を設定
-
ロボットを手動でキャリブレーションの初期位置に移動させます。カーソルを MOVJ P099 VJ=5 に移動させ、ティーチペンダントの DIRECT OPEN キーを押します。
-
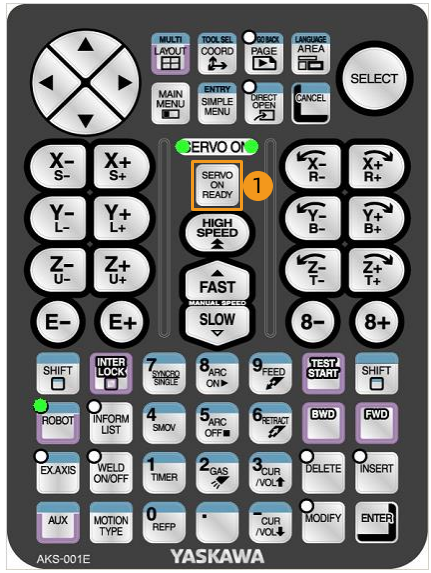
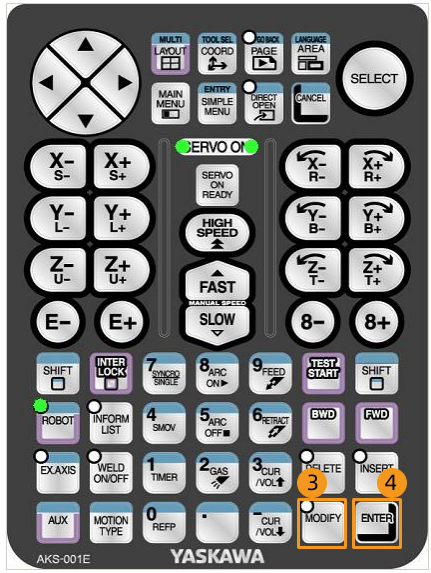
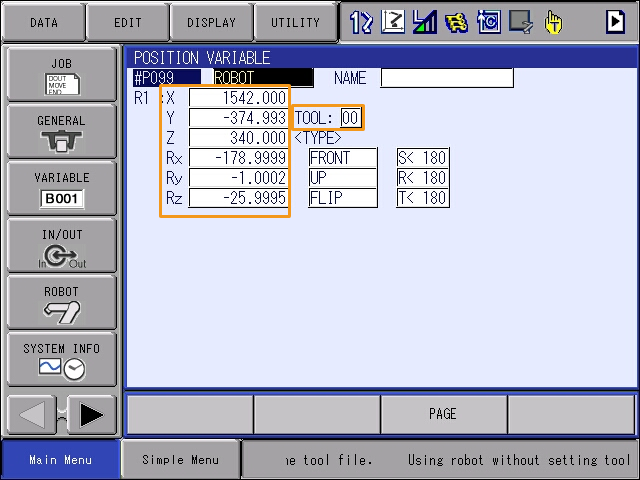
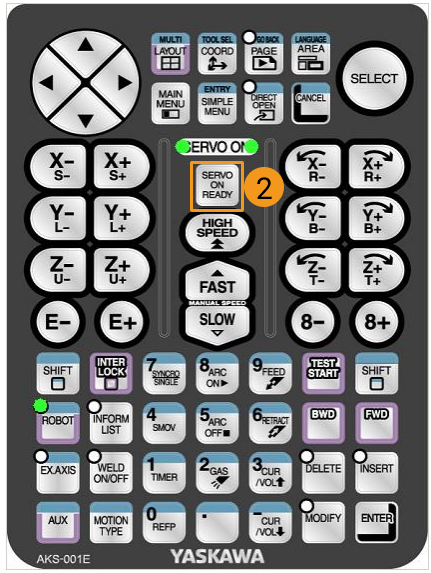
ティーチペンダントの SERVO ON READY を押した後、一方の手でティーチペンダント背面の イネーブルスイッチ を押し続け(もう一方の手の操作が完了するまで離さない)、もう一方の手で順に MODIFY と ENTER を押し、位置型変数 P099 を現在位置に変更します。その際、P099のデータ形式が ロボット となっており、ツールが 00 になっていることを確認してください。

-
ティーチペンダントの DIRECT OPEN キーをもう一度押すと、 JOB の画面に戻ります。
キャリブレーションプログラムを実行
-
カーソルを最初の行に移動し、モードスイッチをPLAYモードに回し、ロボットを リピートモード に切り替えます。その後、ティーチペンダントの SERVO ON READY を押します。

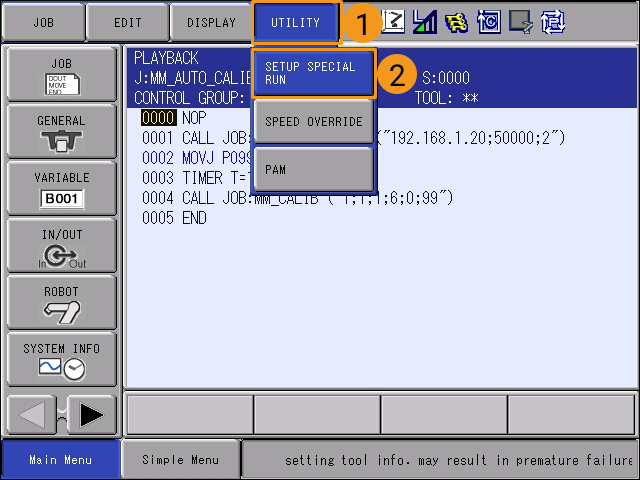
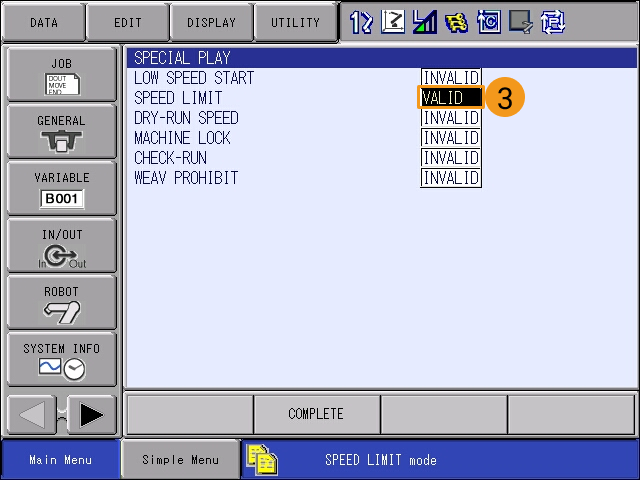
低い速度で動作する必要がある場合、ティーチペンダントパネルの をクリックして、 SPEED LIMIT を VALID に変更します。
-
その後、ティーチペンダントの START キーを押します。ボタンが点灯すると、プログラムの実行が開始されます。

もし実行中に異常が発生した場合は、すぐに 一時停止 または 緊急停止 ボタンを押してください。 -
Mech-Visionの キャリブレーション前の設定 画面では、 ロボットを接続 の下に「接続済み」の状態が表示され、ボタンが ロボットとの接続を待機中… から 接続を切断 に変わったら、 実行 をクリックします。すると、「キャリブレーション(Eye to Hand)」画面が表示されます。
また、Mech-Visionのログバーの コンソール タブに関連メッセージが表示されます。
キャリブレーションの実行手順
キャリブレーションの実行手順はカメラの取り付け方式によって異なります。詳細については、以下の内容をご参照ください。
-
カメラの取り付け方式はEye to handの場合、 自動キャリブレーション(Eye to hand) の キャリブレーションの実行手順 をご参照ください。
-
カメラの取り付け方式はEye in handの場合、 自動キャリブレーション(Eye in hand) の キャリブレーションの実行手順 をご参照ください。
外部パラメータファイルの切替え
Mech-Visionプロジェクトがカメラの外部パラメータファイルを使用している場合、ハンド・アイ・キャリブレーションが完了したら、Mech-Visionプロジェクトに使用されている外部パラメータファイルを新しいものに切り替える必要があります。
-
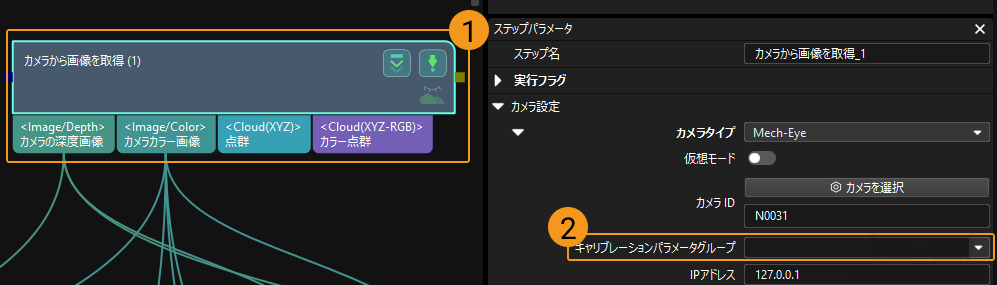
カメラから画像を取得 ステップを選択します。
-
ステップパラメータ から キャリブレーションパラメータグループ の
 をクリックし、表示される画面で新しい外部パラメータファイルを選択します。
をクリックし、表示される画面で新しい外部パラメータファイルを選択します。
キャリブレーションに関するステータスコード
自動キャリブレーションに標準インターフェース通信を使用する場合、ビジョンシステムからロボットに返されるデータにはステータスコードが含まれます。ステータスコードはコマンドの実行を示すために使用され、以下に示すような正常実行完了のコードとエラーコードがあります。