Vizティーチング通信設定(協働ロボット)
以下では、VizによりROKAE Xmate7協働ロボットをティーチングする方法について説明します。
事前準備
コントローラとソフトウェアバージョンを確認
-
ROKAE Xmate7のコントロールソフトウェアを起動した後、下図に従ってロボットを接続してください。ポップアップウィンドウで現在のロボット型番に対応しないというメッセージが表示された場合は、ソフトウェアの指示に従って更新を完了します。

-
コントローラソフトウェアのバージョンを手動でアップグレードするには、アップグレード方法は次のとおりです。
-
ソフトウェアアップグレードパッケージ をダウンロードしてから、USBメモリにコピーしてください。
-
次に、ヘルプ画面に入ります。

-
ソフトウェアアップグレードの画面に入った後、 Open をクリックし、USBメモリ内のアップグレードパッケージを読み込んで、 Upload をクリックします。

-
-
Mech-VisionとMech-Viz 1.5.0およびそれ以降のバージョンは、コントローラバージョン3.6に対応します。コントローラのバージョンが3.6より低い場合は、バージョン1.5.0より低いバージョンのMech-VisionとMech-Vizを使用してください。

ファイルの読み込み








Vizティーチング通信をテスト
-
Mech-Vizのツールバーで Vizティーチングによりロボットを接続 をクリックします。
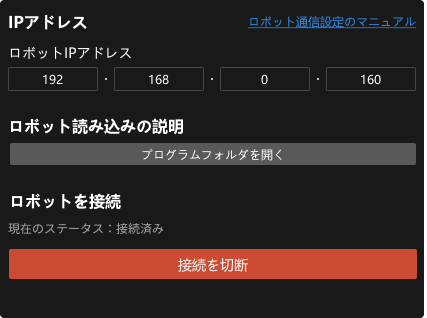
192.168.0.160 を ロボットIPアドレス に入力し、 ロボットを接続 をクリックします。

この時点で、Mech-VizはVizとの通信プログラムが実行するのを待ってから接続を確立します。デフォルトの待機時間は120秒となります。

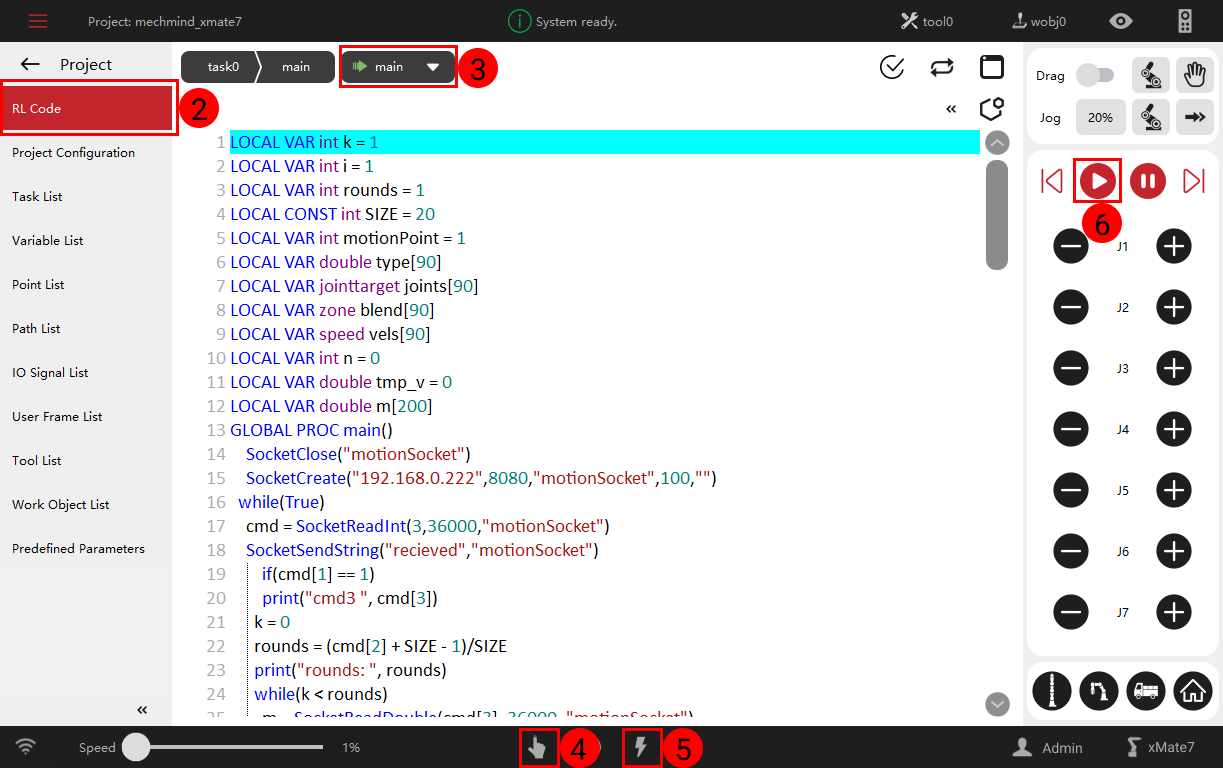
以下は、Vizとの通信プログラムの読み込みと実行に関する操作です。この操作は120秒以内に完了する必要があります。そうでない場合は、Mech-Vizソフトウェアでもう一度 ロボットを接続 をクリックする必要があります。

Mech-Vizソフトウエアでは、現在のステータスは「接続済み」に変わります。
上記の操作が完了したら、 ロボットを移動 を参照して残りの操作を行います。