通信方式の選択
実際のプロジェクトでは、まず通信先(ロボットまたはPLC)およびプロジェクト要件(通信プロトコル、機能要件、プロセスの複雑さなど)を把握し、それに基づいて適切な通信方式を決定する必要があります。プロジェクト要件から適用する通信方式を判断できない場合、Mech-Mindのテクニカルサポートまでお問い合わせください。
-
インターフェース通信を使用する場合は、下図を参考に、実際のプロジェクト要件応じて適切な通信方式を選択してください。

-
標準インターフェース通信に対応している各ロボットまたはPLCについては、標準インターフェース通信対応状況一覧表 をご参照ください。
-
標準インターフェースがサポートする機能の詳細については、標準インターフェース開発者向けマニュアル をご参照ください。
-
Adapterがサポートする機能およびプログラミングガイドについては、Adapter通信 をご参照ください。
-
-
Vizティーチング通信を使用する場合は、下図を参考に、実際のプロジェクト要件に応じて適切な通信方式を選択してください。
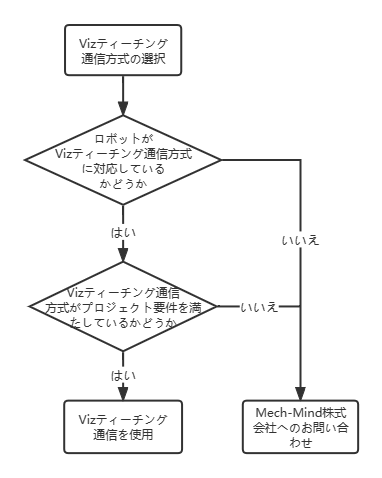
Vizティーチング通信に対応しているロボットについては、Vizティーチング通信対応状況一覧表 をご参照ください。