標準インターフェースのステータスコード一覧とトラブルシューティング
概要
ステータスコードとは、標準インターフェースコマンドの返り値には、コマンドの実行状態を示す4桁の数字コードです。ステータスコードは、正常実行完了のコード(コマンドの正常な実行)とエラーコード(コマンドの異常な実行)に分かれます。エラーコードが報告された場合は、以下の説明を参照してエラー処理を行うことができます。ステータスコードの詳細は以下の通りです。
| ステータスコード | 意味 |
|---|---|
1001~1099 |
|
1100~1199 |
|
2001~2099 |
|
2100~2199 |
|
3001~3099 |
|
3100~3199 |
|
4001~4099 |
|
4100~4199 |
ロボットに関する正常実行完了のコード |
7001~7099 |
|
6001~6199 |
Mech-Visionでユーザーによって設定されたステータスコード |
7100~7199 |
Mech-Vision
Mech-Visionに関するエラーコード
| エラーコード | 意味 |
|---|---|
Mech-Vision:ソリューションに登録されていないプロジェクトがあります |
|
Mech-Vision:ビジョン結果はありません |
|
Mech-Vision:ROIに点群はありません |
|
Mech-Vision:プロジェクトを実行するためのコマンドには、無効なコマンドがあります |
|
Mech-Vision:位置姿勢データは無効です |
|
Mech-Vision:プロジェクトは実行しています |
|
Mech-Vision:DO信号リストが提供されていません |
|
Mech-Vision:位置姿勢の数はラベルの数と一致しません |
|
Mech-Vision:プロジェクト番号は存在しません |
|
Mech-Vision:パラメータレシピが存在しません |
|
Mech-Vision:パラメータレシピが設定されていません |
|
Mech-Vision:パラメータレシピの切り替えに失敗しました |
|
Mech-Vision:プロジェクト実行中にエラーが発生しました |
|
Mech-Vision:コマンドによって取得されたデータが、「出力」ステップの「ポートタイプ」パラメータの値と一致していません |
|
Mech-Vision:文字列ラベルを数値に変換できませんでした |
|
Mech-Vision:設定されたビジョンポイントの数は無効です |
|
Mech-Vision:実行はタイムアウトしました |
|
Mech-Vision:プロジェクトは実行されていません |
|
Mech-Vision:対象物の寸法の設定に失敗しました |
|
Mech-Vision:設定された対象物の寸法が無効です |
|
Mech-Vision:カメラに接続できませんでした |
|
Mech-Vision:位置姿勢リストのサイズはカスタマイズされたデータリストのサイズと一致しません |
|
Mech-Vision:仮想画像データを使用しているため、実行しません |
|
Mech-Vision:位置姿勢のタイプは無効です |
|
Mech-Vision:「経路計画」ステップの実行中にエラーが発生しました |
|
Mech-Vision:ロボットは経路点に到達できません |
|
Mech-Vision:特異点が検出されました |
|
Mech-Vision:把持位置姿勢が無効です |
|
Mech-Vision:ロボットの衝突が検出されました |
|
Mech-Vision:パレタイジングに適切な配置位置がありません |
|
Mech-Vision:「ビジョン処理による移動」ステップはビジョンポイントを受信していません |
|
Mech-Vision:ロボットハンドが無効です |
|
Mech-Vision:撮影終了待ちがタイムアウトになりました |
|
Mech-Vision:箱のマスクの認識にエラーが発生しました |
|
Mech-Vision:箱の寸法のチェックに失敗しました |
|
Mech-Vision:位置姿勢の設定に失敗しました |
|
Mech-Vision:グローバル変数の設定/取得に失敗しました |
|
Mech-Vision:ソリューション切り替えコマンドの呼び出しに失敗しました |
Mech-Visionに関する正常実行完了のコード
| 正常実行完了のコード | 意味 |
|---|---|
1100 |
Mech-Vision:ビジョン結果が正常に取得されました |
1101 |
Mech-Vision:実行する準備ができました |
1102 |
Mech-Vision:プロジェクトが正常にトリガーされました |
1103 |
Mech-Vision:計画された経路の取得に成功しました |
1106 |
Mech-Vision:DO信号リストが正常に取得されました |
1107 |
Mech-Vision:パラメータレシピの切り替えに成功しました |
1108 |
Mech-Vision:対象物の寸法がプロジェクトに正常に入力されました |
1110 |
Mech-Vision:位置姿勢の設定に成功しました |
Mech-Viz
Mech-Vizに関するエラーコード
| エラーコード | 意味 |
|---|---|
Mech-Viz:ソフトウェアが登録されていません |
|
Mech-Viz:プロジェクトは実行しています |
|
Mech-Viz:ロボットは経路点に到達できません |
|
Mech-Viz:Mech-Vizプロジェクトを実行するためのコマンドには、無効なコマンドがあります |
|
Mech-Viz:実行時にエラーが発生しました |
|
Mech-Viz:DO信号リストが提供されていません |
|
Mech-Viz:位置姿勢のタイプは無効です |
|
Mech-Viz:位置姿勢データは無効です |
|
Mech-Viz:プロジェクトの自動読み込みが設定されていません |
|
Mech-Viz プロジェクトが開かれていません |
|
Mech-Viz:ステップパラメータの設定に失敗しました |
|
Mech-Viz:実行を停止できませんでした |
|
Mech-Viz:設定された分岐出口番号が無効です |
|
Mech-Viz:分岐の設定に失敗しました |
|
Mech-Viz:特異点が検出されました |
|
Mech-Viz:プロジェクトが実行されていないか、実行後に結果が出ていません |
|
Mech-Viz:設定された分岐ステップの番号が無効です |
|
Mech-Viz:実行はタイムアウトしました |
|
Mech-Viz:設定されたインデックス付きステップの番号が無効です |
|
Mech-Viz:設定された現在インデックス値が無効です |
|
Mech-Viz:インデックスの設定に失敗しました |
|
Mech-Viz:把持位置姿勢が無効です |
|
Mech-Viz:ロボットの衝突が検出されました |
|
Mech-Viz:パレタイジングに適切な配置位置がありません |
|
Mech-Viz:「ビジョン処理による認識」ステップは呼び出されません |
|
Mech-Viz:ビジョンサービスがビジョン結果を出力していません |
|
Mech-Viz:ROIに点群はありません |
|
Mech-Viz:「ビジョン処理による移動」ステップはビジョンポイントを受信していません |
|
Mech-Viz:ステップパラメータの取得に失敗しました |
|
Mech-Viz:「ビジョン処理による移動」の計画結果の取得に失敗しました |
|
Mech-Viz:カスタマイズされたデータの取得に失敗しました |
|
Mech-Viz:ビジョンサービスが登録されていません |
|
Mech-Viz:ロボットハンドが無効です |
|
Mech-Viz:箱の寸法のチェックに失敗しました |
Mech-Vizに関する正常実行完了のコード
| 正常実行完了のコード | 意味 |
|---|---|
2100 |
Mech-Viz:実行は正常に完了しました |
2102 |
Mech-Viz:DO信号リストが正常に取得されました |
2103 |
Mech-Viz:正常に実行しました |
2104 |
Mech-Viz:正常に停止しました |
2105 |
Mech-Viz:分岐の設定に成功しました |
2106 |
Mech-Viz:インデックスの設定に成功しました |
2107 |
Mech-Viz:「外部移動」ステップの移動点の設定に成功しました |
2108 |
Mech-Viz:ステップパラメータの設定に成功しました |
2109 |
Mech-Viz:ステップパラメータの読み取りに成功しました |
通信コンポーネント
キャリブレーション
Mech-Vision関連のエラーのトラブルシューティング
1001
Mech-Vision:ソリューションに登録されていないプロジェクトがあります
エラーの原因:
-
Mech-Visionが起動されていません。
トラブルシューティング手順:
-
Mech-Visionソフトウェアが起動されていることを確認します。
1002
Mech-Vision:ビジョン結果はありません
エラーの原因:
-
Mech-Visionプロジェクトを実行した後、「出力」ステップのポートデータは空になっています。このエラーが発生する可能性のある原因には、インスタンスセグメンテーションの信頼度しきい値が高すぎる、シーンにマッチングする対象物がない、ROIの設定が不適切、点群の品質が低い、フィルタリングの設定が不適切などが含まれます。
トラブルシューティング手順:
-
デバッグ結果出力の有効化:Mech-Visionソフトウェアを起動し、デバッグ結果出力 のスイッチをオンにします。その後、実行 または ステップ実行 をクリックし、次に接つなぎ線をダブルクリックすると、右側の可視化ウィンドウで具体的な出力結果を確認できます。

-
問題のあるステップの特定:最初のステップから順に、各ポートのデータフローを上から下にチェックします。。データフローに問題があるステップが見つかった場合、そのステップに問題があると特定できます。
-
問題のあるステップのパラメータ確認:必要なステップがすべて正しく設定されていること、そしてデータが正常に転送していることを確認します。
以下のステップのパラメータは出力結果に非常に重要です。そのため、プロジェクトにこれらのステップが含まれている場合は、パラメータ設定に特に注意してください。
-
3D ROI内の点群を抽出:3D ROI設定 パラメータで エディタを開く をクリックし、対象物の点群が緑のボックス内に収まっていることを確認します。
-
3D位置姿勢高精度推定:可視化出力のマッチング効果や現場の状況に応じて 信頼度しきい値 を適切に設定します。
-
信頼度しきい値が高すぎる(たとえば0.9以上)場合、モデルの検出精度が非常に高い場合にのみ、検出対象物は有効なマッチングとしてマークされます。この場合、信頼度しきい値を0.5や0.6に下げることで、見逃し検出を防ぐことができます。
-
信頼度しきい値を調整しても検出効果が改善されない場合は、モデルのトレーニングを見直す必要があります。より多様で挑戦的なデータセットを使用することで、インスタンスセグメンテーションの汎化性を強化し、モデルのパフォーマンスを向上させることができます。
-
-
1003
Mech-Vision:ROIに点群はありません
エラーの原因:
-
3D ROIに点群がありません。
| 実際のプロジェクトでは、このエラーに基づいて、箱が所定の位置にあるかどうか、あるいは箱が空かどうかなどを判断することができます。したがって、このエラーは解決が必要なエラーではないかもしれません。 |
トラブルシューティング手順:
-
プロジェクトに設定されたROIが正しいことを確認します。
1005
Mech-Vision:プロジェクトを実行するためのコマンドには、無効なコマンドがあります
エラーの原因:
-
「Mech-Visionプロジェクトを実行」コマンドを呼び出した際に、「ロボットの位置姿勢タイプ」のパラメータ値が正しく設定されませんでした。「ロボットの位置姿勢タイプ」のパラメータ値の範囲は0~3です。
-
「Mech-Visionプロジェクトを実行して結果を取得」コマンドを呼び出した際、「返されたデータ形式」のパラメータ値が正しく設定されませんでした。「返されたデータ形式」のパラメータ値の範囲は1~4です。
トラブルシューティング手順:
-
コマンドで設定されたパラメータ値が設定可能な範囲にあることを確認します。
1006
Mech-Vision:位置姿勢データは無効です
エラーの原因:
-
「Mech-Visionプロジェクトを実行」コマンドを呼び出した際に、ロボットの位置姿勢のパラメータ値が正しく設定されませんでした。詳細は以下の通りです。
-
関節角度のデータは6桁以下。
-
フランジ位置姿勢のデータは6桁以下。
-
フランジ位置姿勢のデータはすべてゼロ。
-
| デフォルトでは6軸ロボットを使用しています。ロボットが4軸または5軸の場合は、位置姿勢データの残りのフィールドにゼロを入力してください。 |
トラブルシューティング手順:
-
コマンド内で設定されたロボットの位置姿勢パラメータが正しいことを確認し、設定された関節角度やフランジ位置姿勢データが正確かどうかをチェックします。
1007
Mech-Vision:プロジェクトは実行しています
エラーの原因:
-
Mech-Visionプロジェクトの実行中に、クライアントプログラムは「Mech-Visionプロジェクトを実行」コマンドを再度呼び出し、同じのMech-Visionプロジェクトの実行を試行します。
| Mech-Visionでは、複数の異なるプロジェクトを同時に実行することができますが、実行中に同じのMech-Visionプロジェクトを再実行することはできません。 |
トラブルシューティング手順:
-
クライアントプログラムで設定されたMech-Visionプロジェクト番号が正しいことを確認します。
-
クライアントプログラム内で、同じのMech-Visionプロジェクトが短期内に再度起動されないようにしてください。同じプロジェクトを実行する際は、クライアントがそのプロジェクトの実行が完了した後に(Mech-Visionのログバーの Vision タブで「プロジェクト実行終了」のメッセージが表示されます)、再度プロジェクトを実行するようにすることで、このエラーの発生を防げます。
1008
Mech-Vision:DO信号リストが提供されていません
エラーの原因:
-
Mech-Visionから取得されたDO信号が空です。
トラブルシューティング手順:
-
経路計画設定ツールでは、ロボットハンドの種類をデパレタイズ用吸盤に選択し、デパレタイズ用吸盤コンフィギュレータでDO信号が正しく設定されたことを確認します。
1010
Mech-Vision:位置姿勢の数はラベルの数と一致しません
エラーの原因:
-
Mech-Visionプロジェクトの「出力」ステップでは、「poses」ポートから出力された位置姿勢の数が「labels」ポートから出力されたラベル数と一致しません。
トラブルシューティング手順:
-
Mech-Visionプロジェクトのデータフロー内で、位置姿勢とラベルの数が一致していることを確認してください。例えば、下図では、posesポートのデータとlabelsポートのデータの「Size」がそれぞれ2であり、数が一致しています。posesポートのデータの「Size」が3で、labelsポートのデータの「Size」が2の場合は、数が一致しておらず、上記のエラーが発生する可能性があります。

1011
Mech-Vision:プロジェクト番号は存在しません
エラーの原因:
-
プロジェクトリストに設定されたMech-Visionプロジェクト番号がありません。例えば、プロジェクトリストにプロジェクト番号1しか存在しないが、設定されたプロジェクト番号は2です。
トラブルシューティング手順:
-
ソリューションを自動的に読み込む にチェックが入っていることを確認します。
-
設定されたMech-Visionプロジェクト番号がプロジェクトリストにあることを確認します。
1012
Mech-Vision:パラメータレシピが存在しません
エラーの原因:
-
設定されたパラメータレシピ番号がパラメータレシピエディタに存在しません。例えば、パラメータレシピエディタにレシピ番号1しか存在しないが、設定されたパラメータレシピ番号は2です。
トラブルシューティング手順:
-
設定されたパラメータレシピ番号がパラメータレシピエディタに存在することを確認します。
1013
Mech-Vision:パラメータレシピが設定されていません
エラーの原因:
-
クライアントプログラムは「Mech-Visionのパラメータレシピを切り替える」コマンドを呼び出しますが、Mech-Visionプロジェクトはパラメータレシピを設定していません。
トラブルシューティング手順:
-
Mech-Visionプロジェクトのパラメータレシピの設定をチェックし、設定されたパラメータレシピとレシピ番号が正しいことを確認します。
-
プロジェクトがパラメータレシピを切り替える必要がない場合は、クライアントプログラムは「Mech-Visionのパラメータレシピを切り替える」コマンドを呼び出す必要はありません。
1014
Mech-Vision:パラメータレシピの切り替えに失敗しました
エラーの原因:
-
Mech-Visionプロジェクトが実行中の状態でパラメータレシピを切り替えると、このエラーが発生します。
-
Mech-Visionソフトウェアと通信コンポーネント間で通信異常が発生しました。
トラブルシューティング手順:
-
Mech-Mind株式会社のテクニカルサポートにお問い合わせください。
1015
Mech-Vision:プロジェクト実行中にエラーが発生しました
エラーの原因:
-
Mech-Visionプロジェクトの実行中にエラーが発生しました。
| このステータスコードは、Mech-Visionプロジェクトの実行中にエラーが発生したことを示すだけであり、詳細な原因を反映するものではありません。 |
トラブルシューティング手順:
-
Mech-Visionのログバーのエラーメッセージを確認し、エラーメッセージに基づいてプロジェクトの問題をトラブルシューティングします。
1016
Mech-Vision:コマンドによって取得されたデータが、「出力」ステップの「ポートタイプ」パラメータの値と一致していません
エラーの原因:
-
クライアントプログラムが「ビジョン結果を取得」コマンドを呼び出した際、Mech-Visionプロジェクト内の「出力」ステップの ポートタイプ が 事前定義済み(ビジョン結果) に設定されていません。
-
クライアントプログラムが「Mech-Visionのカスタマイズされたデータを取得」コマンドを呼び出した際、Mech-Visionプロジェクト内の「出力」ステップの ポートタイプ が カスタム に設定されていません。
-
クライアントプログラムが「Mech-Visionによって計画された経路を取得」コマンドを呼び出した際、Mech-Visionプロジェクト内の「出力」ステップの ポートタイプ が 事前定義済み(ロボット経路) に設定されていません。
トラブルシューティング手順:
-
Mech-Visionプロジェクトの「出力」ステップの「ポートタイプ」パラメータを確認してください。
-
クライアントプログラムが「ビジョン結果を取得」コマンドを呼び出す場合、Mech-Visionプロジェクト内の「出力」ステップの ポートタイプ は 事前定義済み(ビジョン結果) に設定されていることを確認します。
-
クライアントプログラムが「Mech-Visionのカスタマイズされたデータを取得」コマンドを呼び出す場合、Mech-Visionプロジェクト内の「出力」ステップの ポートタイプ は カスタム に設定されていることを確認します。
-
クライアントプログラムが「Mech-Visionによって計画された経路を取得」コマンドを呼び出す場合、Mech-Visionプロジェクト内の「出力」ステップの ポートタイプ は 事前定義済み(ロボット経路) に設定されていることを確認します。
-
1017
Mech-Vision:文字列ラベルを数値に変換できませんでした
エラーの原因:
-
Mech-Visionの「出力」ステップの「labels」ポートから出力されたデータは整数形式の文字列ではありません。
トラブルシューティング手順:
-
「labels」ポートの出力データを確認します。ラベルが整数形式の文字列でない場合は、「出力」ステップの前に「ラベルマッピング」ステップを使用して、整数形式の文字列にマッピングしてください。例えば、下図のように、「ラベルマッピング」ステップを使用して、文字列ラベル「OK」を整数形式の文字列「0」に、文字列ラベル「NG」を整数形式の文字列「1」にマッピングします。

1018
Mech-Vision:設定されたビジョンポイントの数は無効です
エラーの原因:
-
「Mech-Visionプロジェクトを実行」コマンドを呼び出した際、「ビジョンポイントまたは経路点の予期数」のパラメータ値が 一度に送信する位置姿勢の最大数 より大きい値に設定されました。
| Mech-Visionでは、ツールバーから をクリックします。実際の状況に応じて 一度に送信する位置姿勢の最大数 を設定し、最大数量を30まで設定可能です。 |
トラブルシューティング手順:
-
「ビジョンポイントまたは経路点の予期数」のパラメータ値が、一度に送信する位置姿勢の最大数 より大きくないことを確認します。
1019
Mech-Vision:実行はタイムアウトしました
エラーの原因:
-
このエラーは、「ビジョン結果を取得」コマンドを呼び出してから指定されたタイムアウト時間内(初期値は10秒)にMech-Visionプロジェクトの実行が完了しなかった場合に報告されます。
| Mech-Visionでは、ツールバーから をクリックし、Mech-Visionデータ取得タイムアウト を変更してタイムアウトを変更することができます。 |
トラブルシューティング手順:
-
クライアントプログラムは、「ビジョン結果を取得」コマンドを呼び出す前に遅延プログラムを追加することができます。
-
実行時間が長いMech-Visionプロジェクトの場合は、上記のタイムアウトを適切に変更することができます。
1020
Mech-Vision:プロジェクトは実行されていません
エラーの原因:
-
このエラーは、クライアントプログラムが「Mech-Visionプロジェクトを実行」コマンドを最初に呼び出さずに、「ビジョン結果を取得」コマンドを直接呼び出した場合に報告されます。例えば、プロジェクトリストにMech-Visionプロジェクト1とMech-Visionプロジェクト2があり、クライアントプログラムがコマンドによって最初にMech-Visionプロジェクト1を実行し、次にMech-Visionプロジェクト2のビジョン結果を取得しようとすると、このエラーが報告されます。
-
クライアントプログラムは「ビジョン結果を取得」コマンドを呼び出し、すべてのビジョンポイントを取得したが、引き続き「ビジョン結果を取得」コマンドを呼び出しています。
トラブルシューティング手順:
-
クライアントプログラムをチェックし、「ビジョン結果を取得」コマンドに設定されたMech-Visionプロジェクト番号が正しいことを確認します。
-
「ビジョン結果を取得」コマンドから返されたデータのパラメータ「すべてのビジョンポイントが取得されたかどうか」の値が1である場合、すべてのビジョンポイントが送信されたことを意味しますので、クライアントプログラムはこのコマンドを再度呼び出す必要がありません。
1021
Mech-Vision:対象物の寸法の設定に失敗しました
エラーの原因:
-
Mech-Visionプロジェクトには「対象物の寸法を読み込む」ステップがありません。
トラブルシューティング手順:
-
Mech-Visionプロジェクトには「対象物の寸法を読み込む」ステップを含む必要があります。
1022
Mech-Vision:設定された対象物の寸法が無効です
エラーの原因:
-
対象物の寸法をMech-Visionプロジェクトに送信する時、入力される対象物の寸法にはゼロまたは負の値があります。
トラブルシューティング手順:
-
入力される対象物の寸法(長さ、幅、高さ)の値がすべて正の実数であることを確認します。
1023
Mech-Vision:カメラに接続できませんでした
エラーの原因:
-
カメラがMech-Visionプロジェクトの「カメラから画像を取得」ステップに接続されていません。
トラブルシューティング手順:
-
カメラの電源とネットワーク設定の両方をチェックし、カメラの電源とネットワークが正しく接続されていることを確認します。
-
「カメラから画像を取得」で設定されたカメラのIPアドレスとポートが正しいことを確認します。
1024
Mech-Vision:位置姿勢リストのサイズはカスタマイズされたデータリストのサイズと一致しません
エラーの原因:
-
Mech-Visionプロジェクトの「出力」ステップでは、「poses」ポートの位置姿勢リストのサイズがカスタマイズされたポートのデータのリストサイズと一致しません。例えば、位置姿勢リストが[[1,1,1,0,1,0,0]],[1,1,1,0,0,0,0]]であると仮定すると、カスタマイズされたポートのデータリストが[[1,1]]または[]である場合は、両者のリストサイズが一致しません。カスタマイズされたポートのデータリストが[1,1]である場合は、両者のリストサイズが一致します。
トラブルシューティング手順:
-
Mech-Visionプロジェクトのデータフローの位置姿勢とカスタマイズされたデータを確認し、両者のリストサイズが同じであることを確認します。例えば、下図では、posesポートのデータとcustomポートのデータの「Size」がどちらも2であり、リストサイズが同じです。posesポートのデータの「Size」が3で、customポートのデータの「Size」が2である場合、両者のリストサイズが一致しないため、上記のエラーが発生する可能性があります。

1025
Mech-Vision:仮想画像データを使用しているため、実行しません
エラーの原因:
-
Mech-Visionプロジェクトで「カメラから画像を取得」ステップが使用している画像が、カメラ実機から取得した画像データではなく、ローカルの仮想画像データです。
トラブルシューティング手順:
-
「カメラから画像を取得」ステップの カメラ設定 パラメータで、仮想モード が オフ になっていることを確認してください。
-
仮想モードを使用する必要がある場合は、以下のポップアップウィンドウが表示されたときに 実行 をクリックすると、データが正常に送信されます。また、ソフトウェア再起動前に再度表示しない を選択することをお勧めします。

1026
Mech-Vision:位置姿勢のタイプは無効です
エラーの原因:
-
「Mech-Visionから計画された経路を取得」コマンドを呼び出した際に、「経路点の位置姿勢タイプ」のパラメータ値が正しく設定されませんでした。「経路点の位置姿勢タイプ」の値は1または2にのみ設定可能です。
トラブルシューティング手順:
-
コマンドで設定されたパラメータ値が設定可能な範囲にあることを確認します。
1027
Mech-Vision:「経路計画」ステップの実行中にエラーが発生しました
エラーの原因:
-
Mech-Visionプロジェクトは「経路計画」ステップを実行する時にエラーが発生しました。
| このステータスコードは、「経路計画」ステップにエラーが発生したことを示すだけであり、詳細な原因を反映するものではありません。 |
トラブルシューティング手順:
-
経路計画設定ツールを起動し、ログメッセージを確認し、エラーの原因を突き止めます。
1030
Mech-Vision:ロボットは経路点に到達できません
「経路計画」ステップにエラーが報告されました。エラーの原因は以下の通りです。
-
経路点はロボットの稼働範囲を超えました。
-
ロボット運動学の逆解法に失敗しました。
トラブルシューティング手順:
-
「経路計画」ステップの設定ツールを開き、計画履歴を確認し、赤色で表示されている部分を見つけて、具体的な問題のステップを特定します。

-
「経路が到達不可」の場合は、以下の点を確認してください。
-
経路点の位置姿勢の確認: 位置姿勢の向きが正しく、到達可能であることを確認してください。対象物の位置姿勢とTCPの位置姿勢は異なるので注意してください。
-
TCP値の確認:「経路計画」内のTCPデータが、ロボットの実際のTCP値と一致していることを確認してください。
-
1033
Mech-Vision:特異点が検出されました
「経路計画」ステップにエラーが報告されました。エラーの原因は以下の通りです。
-
ロボットは経路計画中に、角速度または角加速度がソフトウェアによって設定された特異点判定しきい値を超えるため、特異点エラーを検出しました。
-
ロボットは計画された直線経路に沿って動作できませんでした。
トラブルシューティング手順:
-
設定された特異点のしきい値が厳しすぎる場合は、減速比を下げるか、最大速度のしきい値を変更することができます。特異点のしきい値を変更するには、Mech-Mind株式会社のテクニカルサポートにお問い合わせください。
-
ロボットが直線運動できない場合は、関節運動に変更するか、中間点を適切に追加することができます。
1035
Mech-Vision:把持位置姿勢が無効です
エラーの原因:
-
すべての把持位置姿勢がコンテナ内にありません。
-
ワークライブラリで設定された把持位置姿勢の利用可能なロボットハンドが、経路計画設定ツールで選択されたロボットハンドと一致しません。
トラブルシューティング手順:
-
エラー原因1について:
-
カメラの外部パラメータが正しいことを確認します。
-
Mech-Visionプロジェクトの「出力」ステップで、出力されるワークの把持位置姿勢が実際ワークの位置姿勢と一致していることを確認します。
-
Mech-Visionプロジェクトの「経路計画」ステップで、設定ツール をクリックして開き、設定されたコンテナの位置が実際のコンテナの位置と一致していることを確認します。
-
-
エラー原因2について:
-
ワークライブラリで、特定の把持位置姿勢の利用可能なロボットハンドが正しく設定されていることを確認します。たとえば、下図ではPickPoint_2の利用可能なツールはTool_Repositioningです。

-
経路計画設定ツールの 全体的設定 で、選択されたロボットハンドがロボットハンドリスト内の把持位置姿勢の利用可能なロボットハンドと一致していることを確認します。

-
1036
Mech-Vision:ロボットの衝突が検出されました
「経路計画」ステップにエラーが報告されました。エラーの原因は以下の通りです。
-
ロボットはシーンの物体と衝突します。
-
ロボットは対象物の点群と衝突します。
トラブルシューティング手順:
-
ロボットはシーンの物体と衝突した場合は、シーンの物体を回避するための中間点を追加することができます。
-
ロボットは対象物の点群と衝突した場合は、点群衝突検出のしきい値を調整することができます。
-
経路計画の初期位置でエラーが報告された場合は、ロボットの初期位置姿勢を設定することができます。
1037
Mech-Vision:パレタイジングに適切な配置位置がありません
エラーの原因:
-
パレットが満載のため、現在の対象物に適したパレタイジング位置がありません。
トラブルシューティング手順:
-
パレタイジングステップの「計画失敗」出口に適切な処理ロジックを追加してください。
1044
Mech-Vision:「ビジョン処理による移動」ステップはビジョンポイントを受信していません
「経路計画」ステップにエラーが報告されました。エラーの原因は以下の通りです。
-
「経路計画」ステップの入力ポートが位置姿勢データを受信していません。
トラブルシューティング手順:
-
「経路計画」ステップの「ビジョンポイント」ポートをチェックし、このポートに位置姿勢データがあることを確認します。
1046
Mech-Vision:ロボットハンドが無効です
「経路計画」ステップにエラーが報告されました。エラーの原因は以下の通りです。
-
設定されたロボットハンドが無効です。
トラブルシューティング手順:
-
経路計画設定ツールで設定されたロボットハンドをチェックし、グローバル設定でロボットハンドが選択されていることを確認します。
1047
Mech-Vision:撮影終了待ちがタイムアウトになりました
エラーの原因:
-
「カメラから画像を取得」ステップの実行が「撮影完了待ちタイムアウト」時間内に完了しませんでした。
トラブルシューティング手順:
-
ツールバーで「ロボット通信設定」をクリックし、「詳細設定」をクリックします。「撮影完了待ちタイムアウト」の設定を確認します。これは、撮影完了後、「1102:トリガー成功」を返すにチェックを入れた場合にのみ表示されます。
-
設定された「撮影完了待ちタイムアウト」と「カメラから画像を取得」ステップの実行時間を比較します。「撮影完了待ちタイムアウト」が「カメラから画像を取得」ステップの実際の実行時間よりも短い場合は、「撮影完了待ちタイムアウト」を変更して、「カメラから画像を取得」ステップの実行時間よりも大きい値に設定します。例えば、下図のように「撮影完了待ちタイムアウト」が「カメラから画像を取得」ステップの実行時間よりも長い場合、この設定は適切です。

1048
Mech-Vision:箱のマスクの認識にエラーが発生しました
エラーの原因:
-
Mech-Visionプロジェクトは「箱形状の対象物のマスクを検証」ステップを使用して箱のマスクを検証しますが、検証結果がこのステップで設定されたパラメータと一致しません。つまり、箱の寸法が一致する必要あり、すべての箱を認識する必要あり、長方形性の検証 パラメータが正しく設定されていません。
トラブルシューティング手順:
-
「箱形状の対象物のマスクを検証」ステップをチェックし、入力ポートのデータとパラメータが正しく設定されていることを確認します。
1049
Mech-Vision:箱の寸法のチェックに失敗しました
エラーの原因:
-
Mech-Visionプロジェクトは「箱の寸法が有効であるかどうかを検証」ステップを使用して箱のマスクを検証しますが、検証結果がこのステップで設定されたパラメータと一致しません。つまり、箱の寸法情報 に関連するパラメータが正しく設定されていません。
トラブルシューティング手順:
-
「箱の寸法が有効であるかどうかを検証」ステップをチェックし、入力ポートのデータとパラメータが正しく設定されていることを確認します。
1051
Mech-Vision:位置姿勢の設定に失敗しました
エラーの原因:
-
クライアントプログラムが「Mech-Visionプロジェクトに位置姿勢を入力」コマンドを呼び出す際に、「ステップ名」パラメータの値が数字ではなく、または「ステップ名」パラメータの値が対応するステップが「位置姿勢をクイック作成」ではありません。
トラブルシューティング手順:
-
Mech-Visionプロジェクトでは、「位置姿勢をクイック作成」の ステップ名 パラメータの値が数字であることを確認してください。

-
「Mech-Visionプロジェクトに位置姿勢を入力」コマンドを確認し、設定された「ステップ名」コマンドパラメータが、上記の設定された ステップ名 パラメータ値と一致していることを確認してください。
1052
Mech-Vision:グローバル変数の設定/取得に失敗しました
エラーの原因:
-
変数番号IDが有効範囲外である、対応する変数が見つからない、または対象IDの型が通信による読み書きをサポートしていません。
-
変数のデータ型に異常があります。実際の変数値が定義済みのデータ型と一致していません。
トラブルシューティング手順:
-
対象の変数IDが存在するか確認してください。
-
変数IDに対応するデータが、通信による読み書き操作をサポートしているか確認してください。
-
変数値のデータ型と、事前に定義された変数のデータ型が一致しているか確認してください。
1053
Mech-Vision:ソリューション切り替えコマンドの呼び出しに失敗しました
エラーの原因:
-
ソリューション設定に異常があります。ソリューションIDが存在しない、または設定されたソリューションパスが有効なソリューションフォルダではありません。
-
Mech-Visionの現在のソリューションでサブダイアログが開いているため、コマンドの実行がブロックされています。
-
Mech-VisionソリューションまたはMech-Vizプロジェクトの読み込みに失敗しました。
トラブルシューティング手順:
-
メニュー → ロボット通信設定 → ソリューション管理 で、必要なソリューションのIDが存在し、正しいことを確認します。また、ソリューションパスが有効なフォルダであることを確認してください。
-
Mech-Visionの現在のソリューションで開いているすべてのサブダイアログを閉じてから、コマンドを再実行してください。
-
Mech-Visionのログを確認して具体的な原因を特定します。解決できない場合は、Mech-Mindテクニカルサポートにお問い合わせください。
Mech-Viz関連のエラーのトラブルシューティング
2001
Mech-Viz:ソフトウェアが登録されていません
エラーの原因:
-
Mech-Vizが起動されていません。
-
開発者モードでは、複数のMech-Vizを同時に起動します。
トラブルシューティング手順:
-
Mech-Vizソフトウェアが起動されていることを確認します。
-
Mech-Vizで開発者モードを無効にしてから、Mech-Vizを再起動します。
2002
Mech-Viz:プロジェクトは実行しています
エラーの原因:
-
Mech-Vizプロジェクトの実行中に、クライアントプログラムは「Mech-Vizプロジェクトを実行」コマンドを再度呼び出し、Mech-Vizプロジェクトの実行を試行します。
トラブルシューティング手順:
-
クライアントプログラムで同じのMech-Vizプロジェクトが短期間に再度実行されないように確認します。
2004
Mech-Viz:ロボットは経路点に到達できません
エラーの原因:
-
経路点はロボットの可達範囲を超えています。
-
Mech-Vizプロジェクトに「ロボットハンドを切り替え」ステップが含まれている場合、ロボットハンド切り替え前後でTCPが変わることがあり、これによりロボットが経路点に到達できなくなる可能性があります。
トラブルシューティング手順:
-
Mech-Vizを開き、計画履歴を確認し、赤く表示されている部分を見つけて、問題が発生しているステップを特定します。

-
「経路が到達不可」の場合は、以下の点を確認してください。
-
経路点の位置姿勢の確認: 位置姿勢の向きが正しく、到達可能であることを確認してください。対象物の位置姿勢とTCPの位置姿勢は異なるので注意してください。
-
TCP値の確認:Mech-Viz内のTCPデータが、ロボットの実際のTCP値と一致していることを確認してください。
-
ソフトリミットの確認:ソフトリミット設定が正しいことを確認してください(Mech-Vizソフトウェアの右側パネルの下部で、 を順番にクリックします)。
-
2006
Mech-Viz:Mech-Vizプロジェクトを実行するためのコマンドには、無効なコマンドがあります
エラーの原因:
-
「Mech-Vizプロジェクトを実行」コマンドを呼び出した際に、「ロボットの位置姿勢タイプ」のパラメータ値が正しく設定されませんでした。「ロボットの位置姿勢タイプ」のパラメータ値の範囲は0~2です。
トラブルシューティング手順:
-
コマンドで設定されたパラメータ値が設定可能な範囲にあることを確認します。
2008
Mech-Viz:実行時にエラーが発生しました
エラーの原因:
-
Mech-Vizプロジェクト実行中にエラーが発生しました。
トラブルシューティング手順:
-
Mech-Vizを起動し、ログメッセージを確認し、エラーの原因を突き止めます。
2011
Mech-Viz:DO信号リストが提供されていません
エラーの原因:
-
Mech-Vizから取得されたDO信号が空です。
トラブルシューティング手順:
-
「ビジョン処理による移動」ステップの後に「DOを設定」ステップがあり、「通信設定」ステップパラメータで[ロボットに送信]が有効になっていることを確認してください。
-
ロボットハンドの種類をデパレタイズ用吸盤に選択し、デパレタイズ用吸盤コンフィギュレータでDO信号が正しく設定されたことを確認します。
2012
Mech-Viz:位置姿勢のタイプは無効です
エラーの原因:
-
「Mech-Vizから計画された経路を取得」コマンドを呼び出した際に、「経路点の位置姿勢タイプ」のパラメータ値が正しく設定されませんでした。「経路点の位置姿勢タイプ」のパラメータ値は1または2である必要があります。
-
「Mech-Vizプロジェクトを実行して経路を取得」コマンドを呼び出した際に、「経路点の位置姿勢タイプ」のパラメータ値が正しく設定されませんでした。「経路点の位置姿勢タイプ」のパラメータ値は1または2である必要があります。
トラブルシューティング手順:
-
コマンドで設定されたパラメータ値が設定可能な範囲にあることを確認します。
2013
Mech-Viz:位置姿勢データは無効です
エラーの原因:
-
「Mech-Vizプロジェクトを実行」コマンドを呼び出した際に、ロボットの位置姿勢のパラメータ値が正しく設定されませんでした。詳細は以下の通りです。
-
関節角度のデータは6桁以下。
-
フランジ位置姿勢のデータは6桁以下。
-
フランジ位置姿勢のデータはすべてゼロ。
-
| デフォルトでは6軸ロボットを使用しています。ロボットが4軸または5軸の場合は、位置姿勢データの残りのフィールドにゼロを入力してください。 |
トラブルシューティング手順:
-
コマンドで設定されたロボットの位置姿勢のパラメータ値が正しいことを確認します。
2014
Mech-Viz:プロジェクトの自動読み込みが設定されていません
エラーの原因:
-
Mech-VizプロジェクトがMech-Vizで開かれていません。
-
Mech-Vizプロジェクトの自動読み込みが設定されていません。
トラブルシューティング手順:
-
Mech-Vizで正しいプロジェクトを開き、プロジェクト名を右クリックして 自動的に読み込む にチェックを入れます。
2015
Mech-Viz プロジェクトが開かれていません
エラーの原因:
-
対応するMech-Vizプロジェクトが起動していません。
トラブルシューティング手順:
-
現在のMech-Visionと同じソリューションに対応するMech-Vizプロジェクトが起動していることを確認してください。
2016
Mech-Viz:ステップパラメータの設定に失敗しました
エラーの原因:
-
クライアントプログラムが「Mech-Vizステップパラメータを設定」コマンドを呼び出したときにエラーが発生しました。
トラブルシューティング手順:
-
property_configファイルで、ステップ番号とパラメータ名が正しく設定されていることを確認します。
| Mech-Visionでは、ツールバーの をクリックし、プロパティ設定 をクリックしてproperty_configファイルを開きます。 |
2017
Mech-Viz:実行を停止できませんでした
エラーの原因:
-
「Mech-Vizプロジェクトを停止」コマンドを呼び出してから5秒以内にMech-Vizプロジェクトが正常に停止しませんでした。
トラブルシューティング手順:
-
Mech-Mind株式会社のテクニカルサポートにお問い合わせください。
2018
Mech-Viz:設定された分岐出口番号が無効です
エラーの原因:
-
「Mech-Vizの分岐ステップの出口を設定」コマンドを呼び出したとき、設定された分岐出口番号が0以下であるか、「メッセージによって異なる分岐を実行」ステップの出口数を超えています。
トラブルシューティング手順:
-
Mech-Vizプロジェクトを開き、ワークフロー で「メッセージによって異なる分岐を実行」ステップを見つけます。コマンドで設定された分岐出口番号が「メッセージによって異なる分岐を実行」ステップに対応する出口が存在することを確認してください。例えば、コマンドで分岐出口番号が1に設定されている場合、Mech-Vizプロジェクトは実行時に「メッセージによって異なる分岐を実行」ステップの出口0から続行します。

2019
Mech-Viz:分岐の設定に失敗しました
エラーの原因:
-
「Mech-Vizの分岐ステップの出口を設定」コマンドを呼び出したとき、設定されたステップ番号がMech-Vizプロジェクトに対応する「メッセージによって異なる分岐を実行」ステップがありません。
トラブルシューティング手順:
-
Mech-Vizプロジェクトでは、コマンドで設定されたステップ番号に対応するステップがあることを確認します。
2020
Mech-Viz:特異点が検出されました
エラーの原因:
-
ロボットは経路計画中に、角速度または角加速度がMech-Vizによって設定された特異点判定しきい値を超えるため、特異点エラーを検出しました。
-
ロボットは計画された直線経路に沿って動作できませんでした。
トラブルシューティング手順:
-
Mech-Vizで設定された特異点のしきい値が厳しすぎる場合は、Mech-Vizソフトウェアの その他 パネルで、最大速度 を変更するか、減速比 を小さくすることができます。
-
最大速度:ロボットの各関節で許可されている最大角速度です。
-
減速比:ロボットのいずれかの関節速度が 最大速度 の設定値を超えた場合、Mech-Vizは該当する移動ステップで設定された速度を減速比に基づいて減速します(減速後の速度 = 元の速度 × 減速比)し、再度検出を行います。減速後の速度が 最大速度 の設定値よりも小さい場合、ロボットは該当ステップの実行中に減速して動作します。減速後の速度がまだ 最大速度 の設定値を超えている場合、Mech-Vizソフトウェアはその経路がロボットの奇異点を引き起こす可能性があると判定し、その経路の奇異点検出が不合格と見なされます。

-
-
ロボットが直線移動できない場合、まずは方法1をお試しください。問題が解決しない場合は、残りの2つの方法のいずれかをお試しください。
-
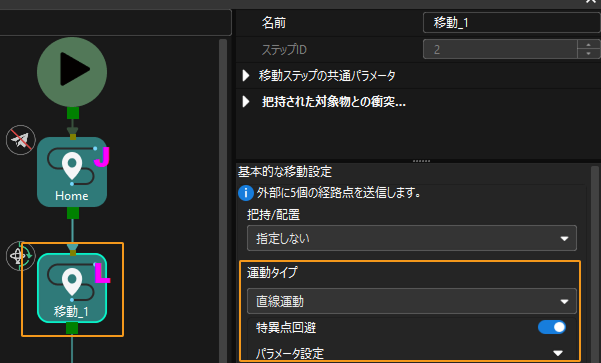
方法1:Mech-Vizソフトウェアで、エラーが発生した移動ステップを選択し、直線運動 オプションで 奇異点回避 を有効にし、実際の状況に応じて パラメータを設定 してください。
-
方法2:Mech-Vizソフトウェアで、エラーが発生した移動ステップを選択し、運動タイプ パラメータを 関節運動 に設定してください。

-
方法3:Mech-Vizソフトウェアで、エラーが発生したステップの前に1つ以上の移動ステップを追加します。例えば、下図のように、移動_1 と home の間に 移動_3 を追加し、中間点を増やします。

-
2022
Mech-Viz:プロジェクトが実行されていないか、実行後に結果が出ていません
エラーの原因:
-
クライアントプログラムが「Mech-Vizの分岐ステップの出口を設定」コマンドを呼び出した際、Mech-Vizプロジェクトは実行されていません。
-
クライアントプログラムが「Mech-Vizから計画された経路を取得」コマンドを呼び出す前に、「Mech-Vizプロジェクトを実行」コマンドを呼び出しません。
-
クライアントプログラムが「Mech-Vizから計画された経路を取得」コマンドを呼び出した際、Mech-Vizから計画結果が出力されません。
-
クライアントプログラムが「Mech-Vizから計画された経路を取得」コマンドを呼び出してすべての経路点を取得していますが、引き続き「Mech-Vizから計画された経路を取得」コマンドを呼び出します。
トラブルシューティング手順:
-
「Mech-Vizの分岐ステップの出口を設定」コマンドを呼び出す際、Mech-Vizプロジェクトが実行中であることを確認します。つまり、「Mech-Vizプロジェクトを実行」コマンドを呼び出した後、Mech-Vizプロジェクトが実行中であることを確認した上で(下図参照)、その後に「Mech-Vizの分岐出口を設定」コマンドを呼び出してください。

-
「Mech-Vizから計画された経路を取得」コマンドを呼び出す前に、必ず「Mech-Vizプロジェクトを実行」コマンドを呼び出します。
-
「Mech-Vizから計画された経路を取得」コマンドから返されたデータの「すべての経路点が取得されたかどうか」のパラメータ値が1である場合、すべての経路点が送信されたことを意味しますので、クライアントプログラムはこのコマンドを再度呼び出す必要がありません。
2024
Mech-Viz:設定された分岐ステップの番号が無効です
エラーの原因:
-
「Mech-Vizの分岐ステップの出口を設定」コマンドを呼び出した際、設定されたステップ番号が正の整数ではありません。
トラブルシューティング手順:
-
コマンドで設定したステップ番号が正の整数であることを確認します。
2025
Mech-Viz:実行はタイムアウトしました
エラーの原因:
-
このエラーは、「Mech-Vizから計画された経路を取得」コマンドを呼び出してから指定されたタイムアウト時間内(初期値は10秒)にMech-Vizプロジェクトの実行が完了しなかった場合に報告されます。
| Mech-Visionでは、ツールバーから をクリックし、Mech-Vizデータ取得タイムアウト を変更してタイムアウトを変更することができます。 |
トラブルシューティング手順:
-
クライアントプログラムは、「Mech-Vizから計画された経路を取得」コマンドを呼び出す前に遅延プログラムを追加することができます。
-
実行時間が長いMech-Vizプロジェクトの場合は、上記のタイムアウトを適切に変更することができます。
2026
Mech-Viz:設定されたインデックス付きステップの番号が無効です
エラーの原因:
-
「Mech-Vizの現在のインデックスを設定」コマンドを呼び出した際、設定されたステップ番号が正の整数ではありません。
トラブルシューティング手順:
-
コマンドで設定したステップ番号が正の整数であることを確認します。
2027
Mech-Viz:設定された現在インデックス値が無効です
エラーの原因:
-
「Mech-Vizの現在のインデックスを設定」コマンドを呼び出した際、設定された現在インデックス値が正の整数ではありません。
トラブルシューティング手順:
-
コマンドで設定した現在インデックス値が正の整数であることを確認します。
2028
Mech-Viz:インデックスの設定に失敗しました
エラーの原因:
-
「Mech-Vizの現在のインデックスを設定」コマンドを呼び出した際、設定されたステップ番号がMech-Vizプロジェクトに対応するインデックス付きのステップがありません。
トラブルシューティング手順:
-
Mech-Vizプロジェクトでは、コマンドで設定されたステップ番号に対応するステップがあることを確認します。
2030
Mech-Viz:把持位置姿勢が無効です
エラーの原因:
-
すべての把持位置姿勢が指定されたコンテナ内にありません。
-
ワークライブラリで設定された把持位置姿勢の利用可能なロボットハンドが、Mech-Vizプロジェクトの「ロボットハンドを切り替え」ステップで選択されたロボットハンドと一致しません。
-
「ビジョン処理による移動」ステップの ビジョン処理の結果フィルター 機能を使用すると、Mech-Vizは指定された範囲を超えたビジョン結果は無効な把持位置姿勢として見なされます。
トラブルシューティング手順:
-
エラー原因1について:
-
カメラの外部パラメータが正しいことを確認します。
-
Mech-Visionプロジェクトの「出力」ステップで、出力されるワークの把持位置姿勢が実際ワークの位置姿勢と一致していることを確認します。
-
Mech-Vizプロジェクトの「ビジョン処理による移動」ステップで、 の設定を確認します。
-
ビジョン処理の結果によってコンテナ位置姿勢を更新 にチェックを入れない場合、Mech-Vizプロジェクトで設定されたコンテナ位置が実際のコンテナ位置と一致していることを確認してください。
-
ビジョン処理の結果によってコンテナ位置姿勢を更新 にチェックを入れている場合、Mech-Visionプロジェクトで認識されたコンテナ位置が実際のコンテナ位置と一致していることを確認してください。
-
-
-
エラー原因2について:
-
ワークライブラリで、特定の把持位置姿勢の利用可能なロボットハンドが正しく設定されていることを確認します。たとえば、下図ではPickPoint_2の利用可能なツールはTool_Repositioningです。
-
Mech-Vizプロジェクト内の「ロボットハンドを切り替え」ステップの 作業モード パラメータに応じて、次のことを確認してください。
-
作業モード が 指定されたツールに切り替え の場合、ロボットハンドを選択 がロボットハンドリスト内の把持位置姿勢の利用可能なロボットハンドに設定されていることを確認してください。

-
作業モード が 適切なツールへの自動切り替え で、かつ 使用中のロボットハンドを制限 にチェックを入れた場合、ロボットハンドを選択 がロボットハンドリスト内の把持位置姿勢の利用可能なロボットハンドに設定されていることを確認してください。

-
-
-
エラー原因3について:
-
Mech-Visionプロジェクトを調整し、出力されるビジョン結果が要件を満たすようにします。
-
「ビジョン処理による移動」ステップの で、その中の2つのパラメータを調整して、把持位置姿勢が指定された範囲内 に収まるようにします。

-
2032
Mech-Viz:パレタイジングに適切な配置位置がありません
エラーの原因:
-
パレットが満載のため、現在の対象物に適したパレタイジング位置がありません。
トラブルシューティング手順:
-
パレタイジングステップの「計画失敗」出口に適切な処理ロジックを追加してください。
2036
Mech-Viz:「ビジョン処理による認識」ステップは呼び出されません
エラーの原因:
-
「ビジョン処理による移動」ステップで設定されたビジョンサービス(「ビジョンサービス名」のパラメータ値)が正常に呼び出されておらず、かつ、Mech-Vizプロジェクトが「ビジョン処理の結果をチェック」ステップの「呼び出されない」出口まで実行されたときに、その出口が他のステップにつながれていないため、Mech-Vizプロジェクトの実行が中断しました。
トラブルシューティング手順:
-
Mech-Vizのワークフローをチェックし、「ビジョン処理の結果をチェック」ステップの前の「ビジョン処理による移動」ステップが設定されたビジョンサービスを正常に起動していることを確認します。

ビジュアルサービスは、Mech-Vizプロジェクトに対応するMech-Visionプロジェクト名です(下図のようにMech-Visionソフトウェアのプロジェクトリストで確認できます)。 
2037
Mech-Viz:ビジョンサービスがビジョン結果を出力していません
エラーの原因:
-
「ビジョン処理による移動」ステップで設定されたビジョンサービス(「ビジョンサービス名」のパラメータ値)はビジョン結果を出力しておらず、Mech-Vizプロジェクトが「ビジョン処理の結果をチェック」ステップの「結果なし」出口まで実行されたときに、その出口が他のステップにつながれていないため、Mech-Vizプロジェクトの実行が中断しました。
トラブルシューティング手順:
-
Mech-Vizプロジェクトが実行されている際に、Mech-Visionソフトウェアのログバーで「出力」ステップにデータが表示されていることを確認します。データが表示されていない場合は、1002 のトラブルシューティング手順を参照し、データフロー全体を確認してデータの正常な転送を確認してください。

-
Mech-Vizプロジェクトでは、「ビジョン処理の結果をチェック」ステップの「結果なし」出口に、適切な後続処理ステップが接続されていることを確認します。例えば、「通知」ステップを接続して結果なしの状況に対応します。
2038
Mech-Viz:ROIに点群はありません
エラーの原因:
-
「ビジョン処理による移動」ステップで設定されたビジョンサービス(「ビジョンサービス名」のパラメータ値)はビジョン結果を出力しておらず、Mech-Vizプロジェクトが「ビジョン処理の結果をチェック」ステップの「点群なし」出口まで実行されたときに、その出口が他のステップにつながれていないため、Mech-Vizプロジェクトの実行が中断しました。
トラブルシューティング手順:
-
1003 ステータスコードを参照して問題をトラブルシューティングします。
2039
Mech-Viz:「ビジョン処理による移動」ステップはビジョンポイントを受信していません
エラーの原因:
-
「ビジョン処理による移動」ステップでは、以下のエラー原因が考えられます。
-
ビジョンサービスはビジョン結果を出力していません。
-
ビジョン結果に含まれるすべての位置姿勢は計画のために使い切れました。
-
トラブルシューティング手順:
-
1002 ステータスコードを参照して問題をトラブルシューティングします。
-
Mech-Vizプロジェクトに「ビジョン結果をチェック」ステップが正しく設定されていることを確認します。
2041
Mech-Viz:ステップパラメータの取得に失敗しました
エラーの原因:
-
クライアントプログラムが「Mech-Vizのステップパラメータを読み取る」コマンドを呼び出したときにエラーが発生しました。
トラブルシューティング手順:
-
property_configファイルで、ステップ番号とパラメータ名が正しく設定されていることを確認します。
| Mech-Visionでは、ツールバーの をクリックし、プロパティ設定 をクリックしてproperty_configファイルを開きます。 |
2042
Mech-Viz:「ビジョン処理による移動」の計画結果の取得に失敗しました
エラーの原因:
-
クライアントプログラムが「Mech-Vizから「ビジョン処理による移動」の計画結果またはカスタマイズされたデータを取得」コマンドを呼び出したときにエラーが発生しました。
トラブルシューティング手順:
-
Mech-Mind株式会社のテクニカルサポートにお問い合わせください。
2043
Mech-Viz:カスタマイズされたデータの取得に失敗しました
エラーの原因:
-
クライアントプログラムが「Mech-Vizから「ビジョン処理による移動」の計画結果またはカスタマイズされたデータを取得」コマンドを呼び出したときにエラーが発生しました。
トラブルシューティング手順:
-
1024 ステータスコードを参照して問題をトラブルシューティングします。
2044
Mech-Viz:ビジョンサービスが登録されていません
エラーの原因:
-
Mech-Vizプロジェクトの「ビジョン処理による認識」ステップにビジョンサービス(「ビジョンサービス名」のパラメータ値)が正しく設定されていません。
トラブルシューティング手順:
-
「ビジョン処理による認識」ステップでビジョンサービス名が正しく設定されていることを確認します。
通信コンポーネントに関するエラーのトラブルシューティング
3001
通信コンポーネント:コマンドが無効です
エラーの原因:
-
ビジョンシステムはこのコマンドに対応していません。
トラブルシューティング手順:
-
ロボット通信設定 で設定された プロトコル を確認し、プロトコルの形式が正しいことを確認します。同時に、クライアントプログラム内のプロトコルの形式が一致しており正しいことを確認します。

-
クライアントプログラムをチェックし、コマンドが正しいことを確認します。
3002
通信コンポーネント:コマンドパラメータのデータの長さまたは形式が無効です
エラーの原因:
-
クライアントプログラムがコマンドを送信する際、コマンドのデータ長が異常で、例えば、ロボットの位置姿勢データが6桁以下です。
-
クライアントプログラムがコマンドを送信する際、コマンドの形式が異常で、例えば、区切り文字として中文カンマが使用されています。
トラブルシューティング手順:
-
クライアントプログラムをチェックし、コマンドが正しいことを確認します。
3005
通信コンポーネント:Mech-Visionの呼び出しがタイムアウトしました
エラーの原因:
-
ビジョンシステムがgRPCサービスを呼び出した際にタイムアウトが発生しました。
トラブルシューティング手順:
-
Mech-Visionを再起動します。
3006
通信コンポーネント:未知エラーです
エラーの原因:
-
ビジョンシステムに未知エラーが発生しました。
トラブルシューティング手順:
-
Mech-Mind株式会社のテクニカルサポートにお問い合わせください。
3007
通信コンポーネント:クライアントからのデータ受信確認信号がタイムアウトしました
エラーの原因:
-
通信プロトコルとして PROFINET または EtherNet/IP が選択されている場合、ビジョンシステムが新しい位置姿勢データをクライアントへ送信する前に、指定されたタイムアウト時間(デフォルト:10秒)以内にクライアントプログラムが Data_Acknowledge 信号を 0 にリセットしなかった場合、このエラーが発生します。
-
通信プロトコルとして PROFINET または EtherNet/IP が選択されている場合、ビジョンシステムが位置姿勢データをクライアントへ送信した後、指定されたタイムアウト時間(デフォルト:10秒)以内にクライアントプログラムが Data_Acknowledge 信号を 1 に設定しなかった場合(クライアントがデータを読み取ったことを示す)、このエラーが発生します。
-
通信プロトコルとして Siemens PLC Snap7、Modbus TCP、Mitsubishi MC、PROFINET または EtherNet/IP が選択されており、かつ 「601コマンド―通知メッセージを取得」 を使用している場合、指定されたタイムアウト時間(デフォルト:10秒)以内に、クライアントプログラムが次回の通知メッセージ取得前に CLEAR_NOTIFY 信号を ON にして NOTIFY の内容をクリアしなかった場合、このエラーが発生します。
-
通信プロトコルとして PROFINET または EtherNet/IP が選択されている場合、指定されたタイムアウト時間(デフォルト:10秒)以内に、クライアントプログラムが次回のカメラ露出前に RESET_EXPOSURE 信号を ON にして EXPOSURE_COMPLETE フラグをリセットしなかった場合、このエラーが発生します。
トラブルシューティング手順:
-
通信プロトコルとして PROFINET または EtherNet/IP を使用している場合は、クライアントプログラムを確認し、「ビジョン結果を取得」コマンドまたは「Mech-Vizの経路計画を取得」コマンドを実行する前に、Data_Acknowledge 信号が 0 であることを確認してください。
-
通信プロトコルとして PROFINET または EtherNet/IP を使用している場合は、クライアントプログラムを確認し、ビジョンシステムから送信された位置姿勢データを読み取った後、Data_Acknowledge 信号を速やかに 1 に設定してください。
-
通信プロトコルとして Siemens PLC Snap7、Modbus TCP、Mitsubishi MC、PROFINET または EtherNet/IP を使用し、かつ 「601コマンド―通知メッセージを取得」 を使用している場合は、クライアントプログラムを確認し、次回の通知メッセージ取得前に CLEAR_NOTIFY 信号を ON にして、1回の信号ハンドシェイク周期分のパルスを生成し、NOTIFY の内容をクリアしてください。
-
通信プロトコルとして PROFINET または EtherNet/IP を使用している場合は、クライアントプログラムを確認し、次回のカメラ露出前に RESET_EXPOSURE 信号を ON にして、1回の信号ハンドシェイク周期分のパルスを生成し、EXPOSURE_COMPLETE フラグをリセットしてください。
キャリブレーションに関するエラーのトラブルシューティング
7001
キャリブレーション:パラメータエラーです
エラーの原因:
-
クライアントプログラムがキャリブレーションを実行した際、ビジョンシステムに送信されたロボットの位置姿勢データが正しくありません。詳細は以下の通りです。
-
関節角度のデータは6桁以下。
-
フランジ位置姿勢のデータは6桁以下。
-
フランジ位置姿勢のデータはすべてゼロ。
-
| デフォルトでは6軸ロボットを使用しています。ロボットが4軸または5軸の場合は、位置姿勢データの残りのフィールドにゼロを入力してください。 |
トラブルシューティング手順:
-
クライアントプログラムから送信されたロボットの位置姿勢データが正しいことを確認します。
7002
キャリブレーション:Mech-Visionはキャリブレーションするためのフランジ位置姿勢を提供していません
エラーの原因:
-
キャリブレーション中、Mech-Visionは次のキャリブレーションポイントのフランジ位置姿勢をロボットに送信しません。
トラブルシューティング手順:
-
Mech-Mind株式会社のテクニカルサポートにお問い合わせください。