KUKAロボットで標準インターフェースプログラムをバックグラウンドで実行する方法
KUKAロボットの場合、メインタスクがサブタスクを呼び出す際、メインタスクはフォアグラウンドで、サブタスクはバックグラウンドで実行されます。バックグラウンドプログラムは、ロボットが起動した後、自動実行される必要があります。以下では、KUKAロボットで標準インターフェースプログラムをバックグラウンドで実行する方法を説明します。
| 設定を開始する前に、KUKAロボットの標準インターフェース通信設定 が完了したことを確認してください。 |
バックグラウンドプログラムの作成・実行
-
メインメニューに入り、ユーザーグループを エキスパート に切り替えます。デフォルトのパスワードは kuka です。

-
R1 フォルダを選択し、新規 をクリックし、プログラムファイルを保存するために新しいフォルダーを作成します。ここでは、test と名前付けます。

-
testフォルダーを開き、右側の オブジェクトなし を選択し、新規 をクリックします。テンプレートの選択 画面が表示されます。

-
テンプレートの選択 画面で、Submit をダブルクリックし、バックグラウンドで実行するSubmitプログラムを作成します。

-
プログラム名を入力し、ENTERを押して保存します。ここでは、mmtrigger と名前付けます。

-
新規作成した mmtrigger プログラムを選択し、開く をクリックし、プログラムを編集します。

例のコードは、Mech-Visionプロジェクトを実行し、ビジョン結果を取得するために使用されます。

-
S ボタンをクリックし、SUBMITインタプリター を開きます。表示/適用 をクリックして、設定画面に入ります。

-
現在の表示/割り当て 画面で、EX1 の mmtrigger プログラムを選択し、選択/スタート をクリックし、バックグラウンドプログラムを実行します。

-
コールドスタートの構成 タブで、EX1 の mmtrigger プログラムを選択し、自動スタート にチェックを入れ、バックグラウンドプログラムを自動実行します。

フォアグラウンドプログラムの作成・実行
-
testフォルダーを開き、右側の mmtrigger を選択し、新規 をクリックします。テンプレートの選択 画面が表示されます。

-
テンプレートの選択 画面で、Modul をダブルクリックし、モジュールを新規作成します。ここでは、MainModul と名前付けます。

-
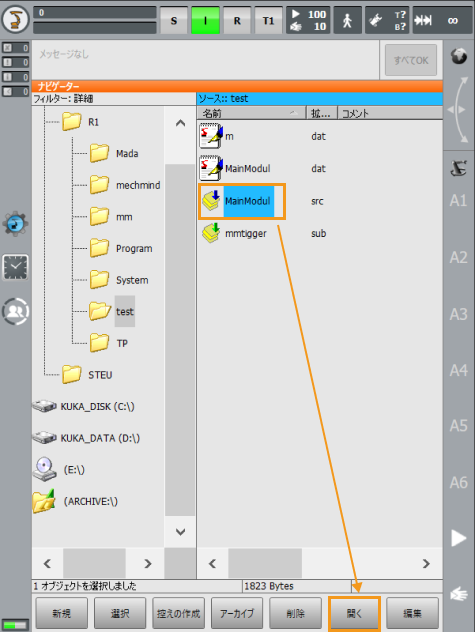
新規作成した MainModul.src プログラムを選択し、開く をクリックし、プログラムを編集します。
例のコードは、$FLAG[10]がTUREの場合、フォアグラウンドプログラムがバックグラウンドプログラムを呼び出すために使用されます。

-
バックグラウンドプログラムの正常実行を確認した後、上記のフォアグラウンドプログラムを実行します。詳細は、キャリブレーションプログラムの実行 をご参照ください。