通信設定とサンプルプログラムの使用
オムロン CJ シリーズのPLCとMech-MindビジョンシステムとのEtherNet/IP通信は、以下の2つの方法で実装できます。
-
ハードウェアのPCI-eネットワークカードを使用する方法。
-
ネットワークカードのハードウェアを必要とせずにソフトウェア設定で実装する方法。
|
ハードウェアとソフトウェアの要件
|
本文に記載されている型番およびバージョンは、動作確認に使用したものです。その他の型番やバージョンについても、本文を参考に操作をお試しください。問題が発生した場合は、Mech-Mindのテクニカルサポートまでお問い合わせください。 |
ハードウェア
EtherNet/IP通信をソフトウェア設定で実装する場合は、ここをクリックして必要なハードウェアとハードウェア接続図を表示します。
-
EIP通信機能に対応可能なオムロンPLCは以下の通りです。
-
CJ2H-CPU6□-EIP、CJ2M-CPU3□など、EIP機能を内蔵したCPU本体。
-
CJ1W-EIP21またはCS1W-EIP21通信モジュール(EtherNet/IP Unit)のインストールに対応可能なその他のCPU。
本サンプルは、CJ2H CPU65-EIPで、UNIT NO.を0、NODE NO.を15(16進数、10進数は21)に設定したものを使用します。
-
-
USB Type-A - USB Type-B 変換ケーブル。
-
電源モジュール。
-
IPC。
-
スイッチおよびLANケーブル。
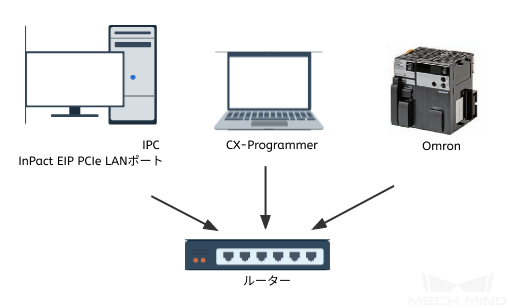
ハードウェアの接続関係は下図のとおりです。各機器のIPアドレスは互いに異なる必要がありますが、同一のサブネット内に設定し、かつ他の機器で使用されていない必要があります。PLCのIPアドレス設定については、以下の説明をご参照ください。IPCおよびCX-ProgrammerソフトウェアをインストールしたPCのIPアドレス設定については、こちらのリンク をご参照ください。

EtherNet/IP通信をハードウェアのPCI-eネットワークカードで実装する場合は、ここをクリックして必要なハードウェアとハードウェア接続図を表示します。
-
EIP通信機能に対応可能なオムロンPLCは以下の通りです。
-
CJ2H-CPU6□-EIP、CJ2M-CPU3□など、EIP機能を内蔵したCPU本体。
-
CJ1W-EIP21またはCS1W-EIP21通信モジュール(EtherNet/IP Unit)のインストールに対応可能なその他のCPU。
本サンプルは、CJ2H CPU65-EIPで、UNIT NO.を0、NODE NO.を15(16進数、10進数は21)に設定したものを使用します。
-
-
USB Type-A - USB Type-B 変換ケーブル。
-
電源モジュール。
-
標準PCI-e通信ボード HMS Ixxat INpact EIP Slave PCIe(INpact EIPスレーブ PCIe)(ユーザーにて購入・準備)が搭載されたIPCまたはホストPC。
-
スイッチおよびLANケーブル。
ハードウェアの接続関係は下図のとおりです。各機器のIPアドレスは互いに異なる必要がありますが、同一のサブネット内に設定し、かつ他の機器で使用されていない必要があります。PLCおよび通信ネットワークカードのIPアドレス設定については、以下の説明をご参照ください。IPCおよびCX-ProgrammerソフトウェアをインストールしたPCのIPアドレス設定については、こちらのリンク をご参照ください。
ソフトウェア
EtherNet/IP通信をソフトウェア設定で実装する場合は、ここをクリックして必要なソフトウェアを表示します。
| ソフトウェア |
|---|
説明 |
インストール場所 |
CX-Programmer 9.70 |
オムロン PLCプログラミングソフトウェア |
オムロン PLCプログラミングのためのPC |
Mech-VisionとMech-Vizソフトウェア(2.0.0バージョン以上) |
Mech-Mindビジョンシステムのソフトウエア搭載 |
IPC |
上記のソフトウェアに加えて、以下のファイルをIPCからCX-Programmerをインストールしたコンピュータへコピーし、後続の使用に備えてください。
-
Software EIP.edsファイル:EtherNet/IP ネットワーク上でIPCの識別情報を提供するためのものです。
Software EIP.edsファイルは、Mech-VisionおよびMech-Vizソフトウェアのインストールディレクトリにある Communication Component/Robot_Interface/EthernetIP/EDSフォルダに格納されます。 -
PLCサンプルプログラムファイル:
-
AUTOEXEC.OBJ(プログラム)。
-
PROGRAMS.IDX(プログラムインデックス)。
-
SYMBOLS.SYM(符号)。
-
COMMENTS.CMT(プログラムコメント)。
サンプルプログラムファイルは、Mech-VisionおよびMech-Vizソフトウェアのインストールディレクトリにある Communication Component/Robot_Interface/EthernetIP/Programming Samples/Omron CX-Programmer CJ2H PLC EthernetIPフォルダに格納されます。
-
EtherNet/IP通信をハードウェアのPCI-eネットワークカードで実装する場合は、ここをクリックして必要なソフトウェアを表示します。
| ソフトウェア | 説明 | インストール場所 |
|---|---|---|
CX-Programmer 9.70 |
オムロン PLCプログラミングソフトウェア |
オムロン PLCプログラミングのためのPC |
IXXAT VCI V4 |
ネットワークカード用ドライバソフトウェア |
IPC |
公式サイト最新バージョン IXXAT VCI V4 |
||
Mech-VisionとMech-Vizソフトウェア(2.0.0バージョン以上) |
Mech-Mindビジョンシステムのソフトウエア搭載 |
IPC |
通信ネットワークカードのIPアドレスを設定 |
IPC |
上記のソフトウェアに加えて、以下のファイルをIPCからCX-Programmerをインストールしたコンピュータへコピーし、後続の使用に備えてください。
-
005A002B003A0100.EDSファイル:EtherNet/IP ネットワーク上でIPCの識別情報を提供するためのものです。
005A002B003A0100.EDSファイルは、Mech-VisionおよびMech-Vizソフトウェアのインストールディレクトリにある Communication Component/Robot_Interface/EthernetIP/EDSフォルダに格納されます。 -
PLCサンプルプログラムファイル:
-
AUTOEXEC.OBJ(プログラム)。
-
PROGRAMS.IDX(プログラムインデックス)。
-
SYMBOLS.SYM(符号)。
-
COMMENTS.CMT(プログラムコメント)。
サンプルプログラムファイルは、Mech-VisionおよびMech-Vizソフトウェアのインストールディレクトリにある Communication Component/Robot_Interface/EthernetIP/Programming Samples/Omron CX-Programmer CJ2H PLC EthernetIPフォルダに格納されます。
-
通信設定
EtherNet/IP通信をソフトウェア設定で実装する場合は、ここをクリックして詳細を表示します。
-
Mech-Visionを起動します。表示される画面に応じて、以下のようにソリューションの作成方法を選択します。
-
ようこそ画面が表示されたら、ソリューションを新規作成 をクリックして新しい空白のソリューションを作成します。
-
メイン画面が表示されたら、メニューバーの をクリックして新しい空白のソリューションを作成します。
-
実際のプロジェクトで使用するロボットに応じて、ロボットを選択 ドロップダウンリストから 適応可能なロボット または その他のロボット を選択します。その後、次へ をクリックします。
-
適応可能なロボット:ほとんどのロボットに適用されます。ロボット型番を選択 をクリックすると、具体的なモデルのロボットを選択できます。
-
その他のロボット:直交ロボットや、上記以外のロボットに適用されます。ロボットのオイラー角のタイプ と ロボット座標系 を選択する必要があります。
-
-
-
ロボット通信設定 の画面で以下の設定を行います。
-
ロボットを選択 ドロップダウンリストから 適応可能なロボット を選択して ロボット型番を選択 をクリックします。表示される画面で特定のロボット型番を選択して 次へ をクリックします。
-
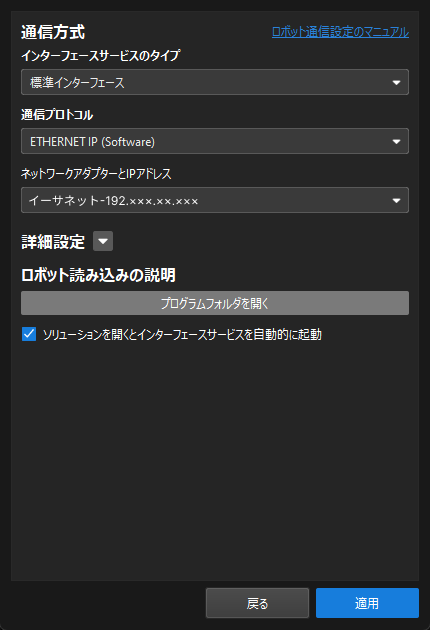
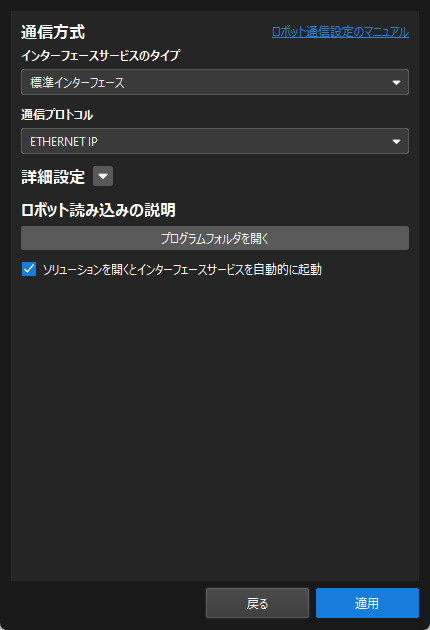
通信方式 で、インターフェースサービスのタイプ を 標準インターフェース に、通信プロトコル を ETHERNET IP (Software) に選択します。ネットワークアダプターとIPアドレス には、EtherNet/IP通信を使用するローカルのネットワークアダプターとIPアドレスを選択します。
-
(オプション)ソリューションを開くとインターフェースサービスを自動的に起動 にチェックを入れることを推奨します。
-
適用 をクリックします。
-
-
Mech-Visionのメイン画面で、ツールバーのインターフェースサービスが起動されていることを確認します。
EtherNet/IP通信をハードウェアのPCI-eネットワークカードで実装する場合は、ここをクリックして詳細を表示します。
IPCのPCI-eネットワークカードとドライバソフトウェアを確認
-
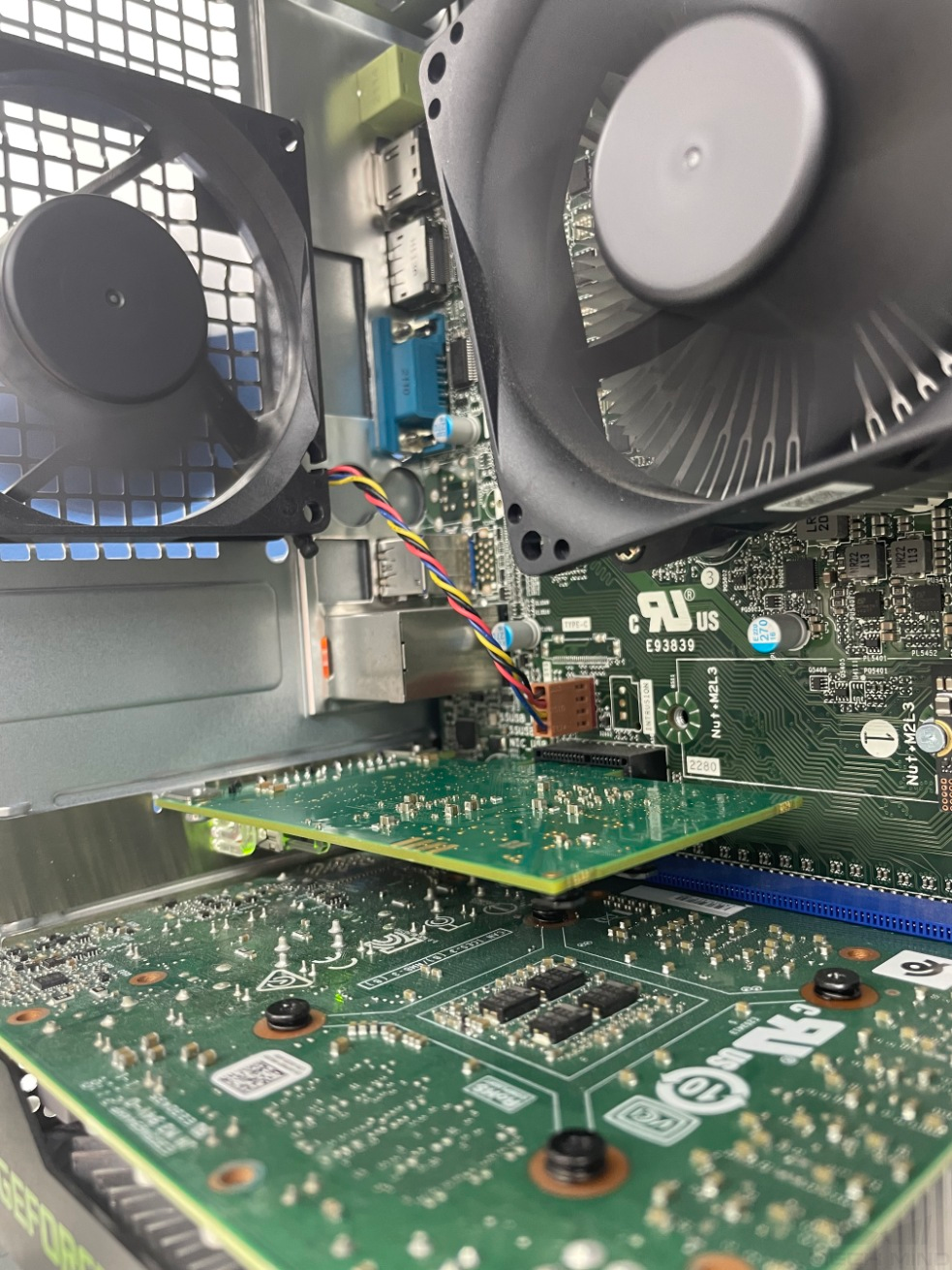
下図の通り、INpact EIP Slave PCIe ネットワークカードがIPCのPCI-eスロットに圧入されていることを確認してください。
-
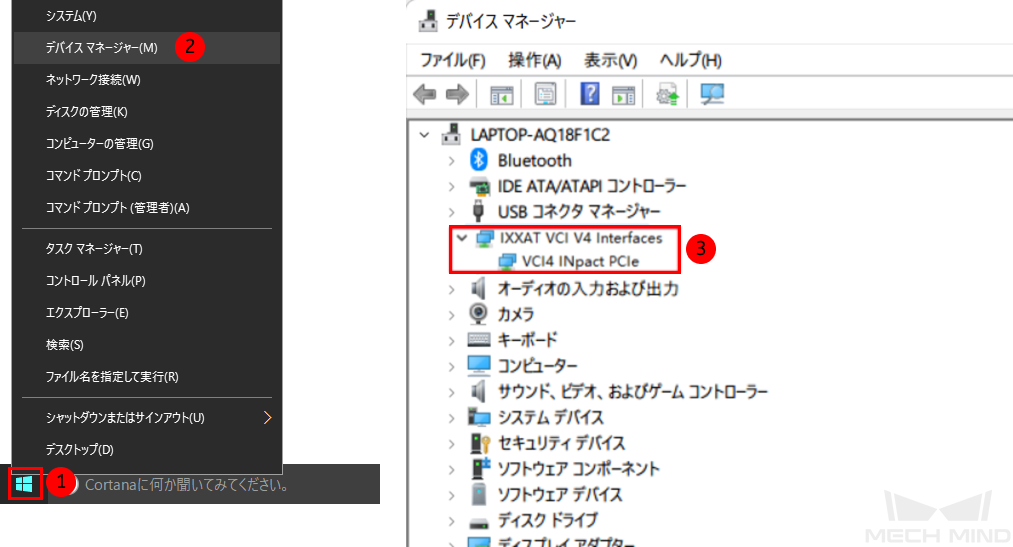
IPCを起動し、Windowsのアイコンを右クリックしてデバイスマネージャーを開き、ドライバーソフトウェア VCI4 INpact PCIeがインストールされていることを確認します。
「ロボット通信設定」を実行
-
Mech-Visionを起動します。表示される画面に応じて、以下のようにソリューションの作成方法を選択します。
-
ようこそ画面が表示されたら、ソリューションを新規作成 をクリックして新しい空白のソリューションを作成します。
-
メイン画面が表示されたら、メニューバーの をクリックして新しい空白のソリューションを作成します。
-
-
Mech-Visionのツールバーで ロボット通信設定 をクリックします。
-
ロボット通信設定 の画面で以下の設定を行います。
-
実際のプロジェクトで使用するロボットに応じて、ロボットを選択 ドロップダウンリストから 適応可能なロボット または その他のロボット を選択します。その後、次へ をクリックします。
-
適応可能なロボット:ほとんどのロボットに適用されます。ロボット型番を選択 をクリックすると、具体的なモデルのロボットを選択できます。
-
その他のロボット:直交ロボットや、上記以外のロボットに適用されます。ロボットのオイラー角のタイプ と ロボット座標系 を選択する必要があります。
-
-
通信方式 で、インターフェースサービスのタイプ を 標準インターフェース に、通信プロトコル を ETHERNET IP に設定します。
-
(オプション)ソリューションを開くとインターフェースサービスを自動的に起動 にチェックを入れることを推奨します。
-
適用をクリックします。
-
-
Mech-Visionのメイン画面で、ツールバーのインターフェースサービスが起動されていることを確認します。
IPCのネットワークカードのIPアドレスを設定
| 次の操作を開始する前に、前の手順で使用したインターフェースサービスがオンになっていることを確認してください。 |
-
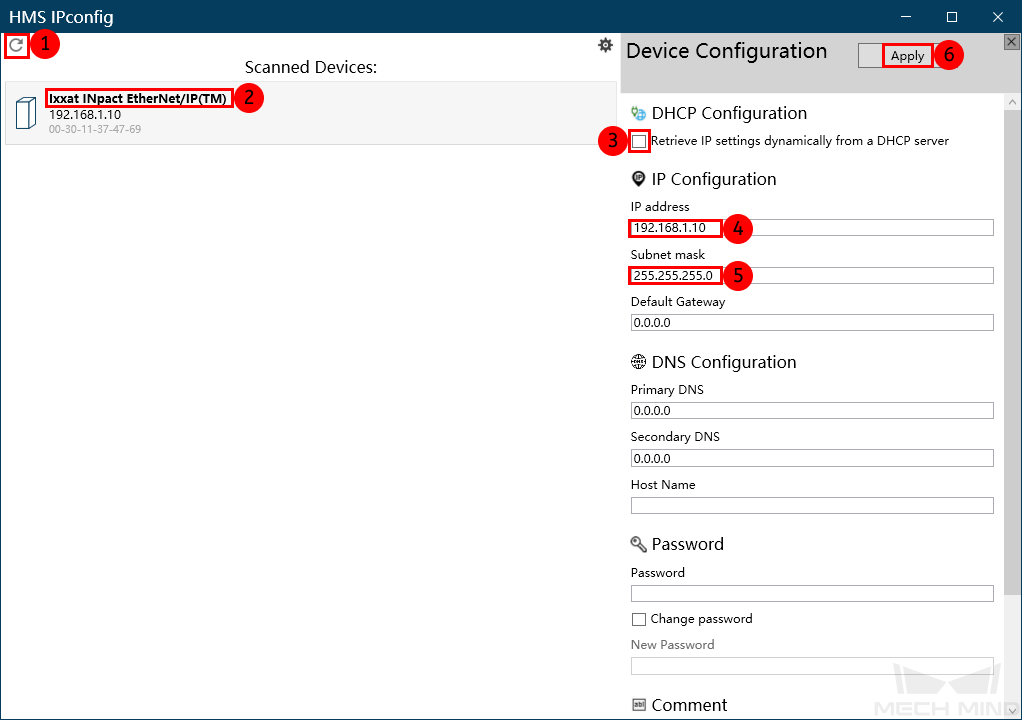
ネットワークカードのIPアドレスを設定するために、HMSのIPconfigというソフトウェアを使用する必要があります。IpconfigがインストールされているIPCのLANポートと、IXXAT INpactネットワークカードのLANポートをLANケーブルで接続します。
ネットワークカードをセットアップし、通信ができた後、一時使用LANケーブルを撤去することが可能です。 -
HMS IPconfigソフトウェアを起動し、スキャンをクリックし、DHCPのチェックを外して、ボードのIPアドレスとサブネットマスクを設定します。PLCで設定されたIPアドレスと同じなIPアドレスを設定し、適用 をクリックして確認した上で、ソフトウェアを終了します。
PLCプロジェクトの作成と設定
PLCプロジェクトの作成
-
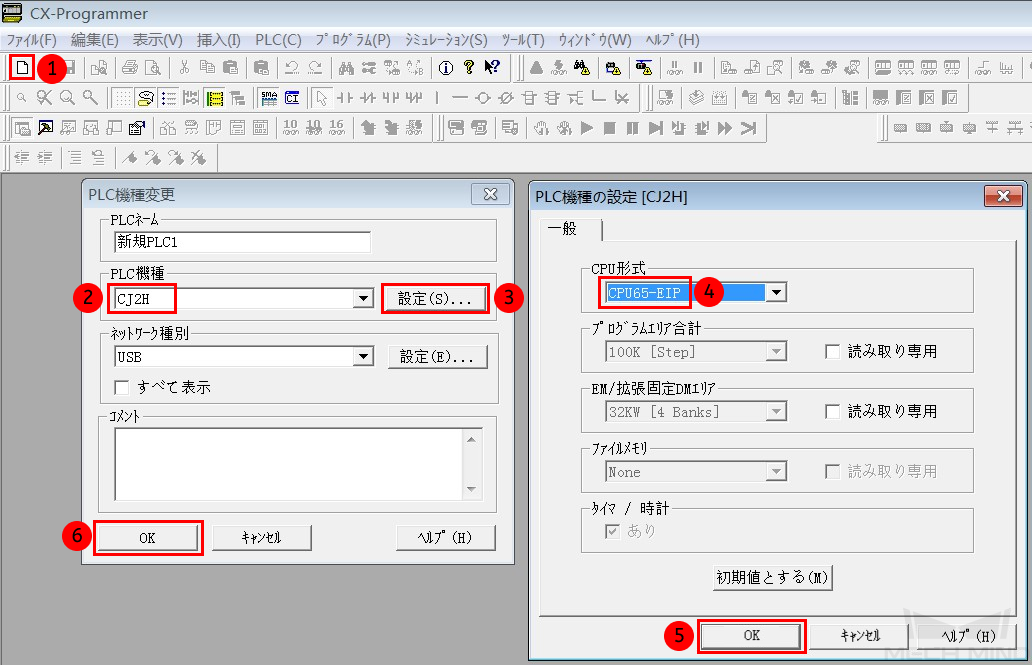
CX-Programmerソフトウェアを起動し、ツールバーの 新規作成 をクリックすると PLC機種変更 ウィンドウが表示されます。PLC種類 を実際に合わせて選択し、設定 をクリックします。すると、PLC種類の設定 ウィンドウが表示されます。CPU形式 を実際に合わせて選択し、OK をクリックして保存します。
-
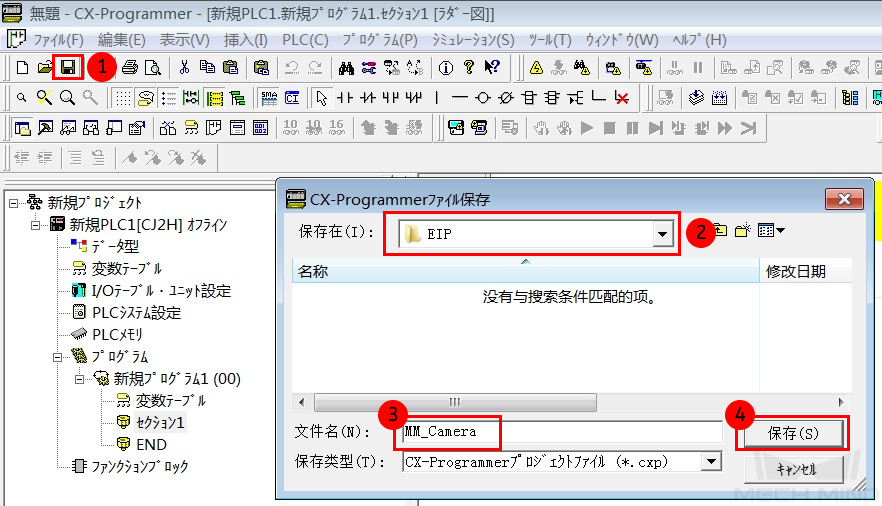
ツールバーの 保存 をクリックし、表示されたウィンドウでCX-Programmerプロジェクトファイルの保存パスを選択し、ファイル名を記入してから 保存 をクリックします。
-
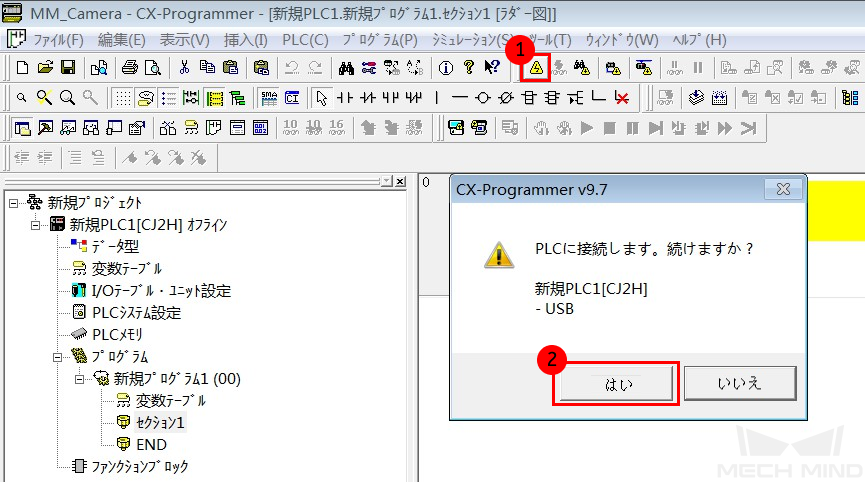
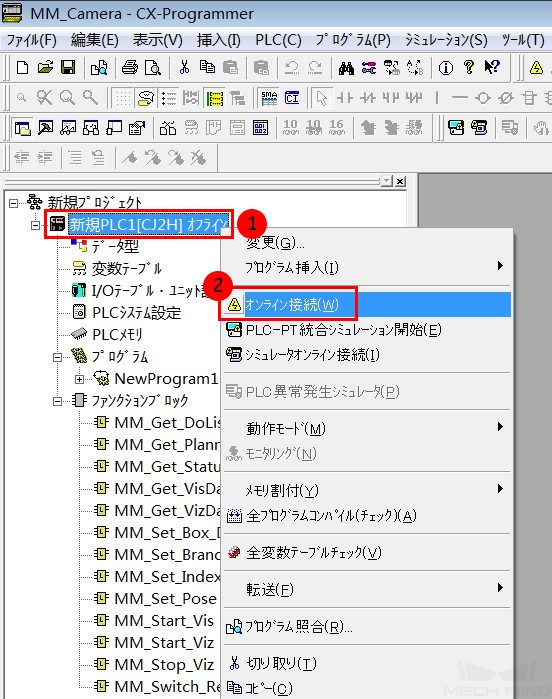
ツールバーの オンライン をクリックし、表示されたウィンドウで はい をクリックします。
-
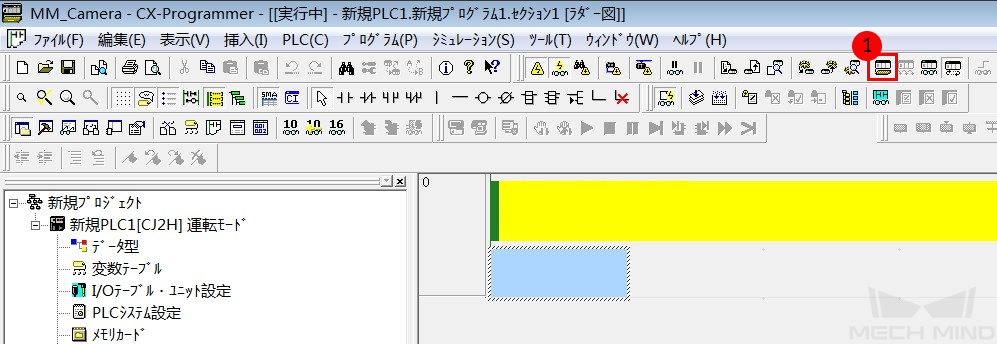
ツールバーの プログラミングモード をクリックし、PLCを停止できるかどうかがポップアップで表示されます。停止しても問題なければ はい をクリックします。
-
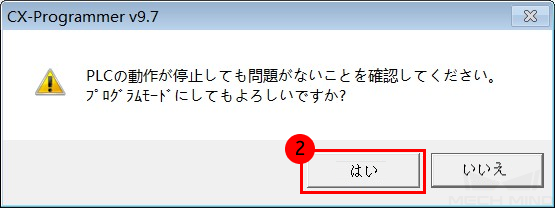
プロジェクトの をクリックすると、PLCのI/Oテーブル ウィンドウが表示されます。
-
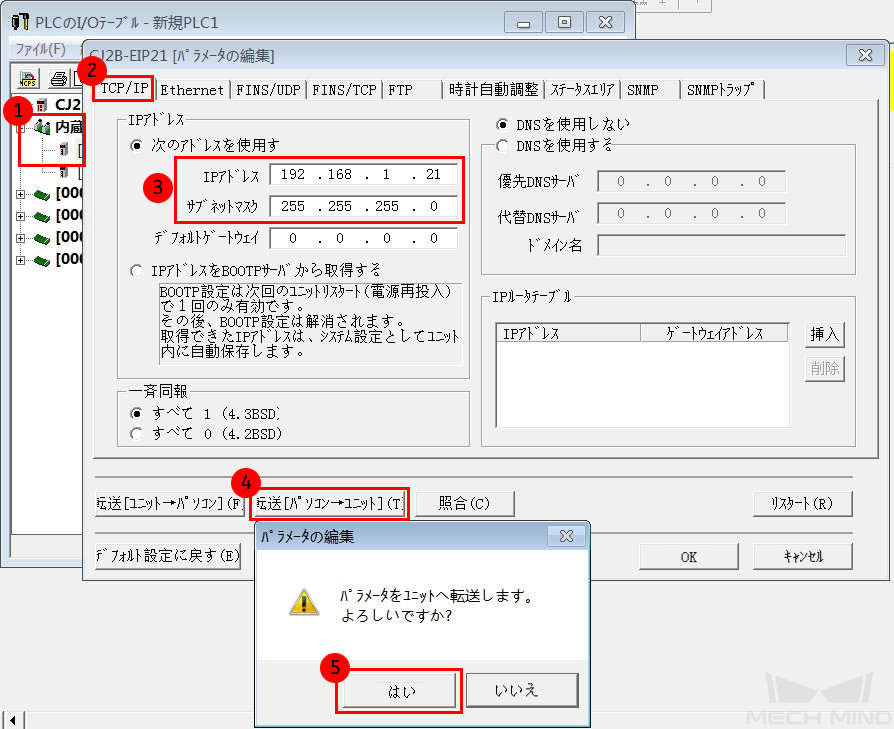
PLCのI/Oテーブル ウィンドウの 内蔵ポート/インナーボード(この例では)*を展開します。*CJ2B-EIP21(CJ2M 用内蔵 EtherNet/IP ポート) をダブルクリックして CJ2B-EIP21パラメータの編集 ウィンドウに入ります。次に、TCP/IP タブでIPアドレスとサブネットマスクを設定し、転送[パソコン→ユニット] をクリックします。表示されたウィンドウで はい をクリックします。
-
正常に転送できたら、OK をクリックします。
-
ユニット再起動のポップアップウィンドウが表示されます。はい をクリックします。再起動後、OK をクリックして CJ2B-EIP21 パラメータの編集 ウィンドウに戻り、OK をクリックします。
EDSファイルをインストールして設定
EtherNet/IP通信をソフトウェア設定で実装する場合は、ここをクリックして詳細を表示します。
-
PLCのI/Oテーブル ウィンドウで、右クリックで を選択します。
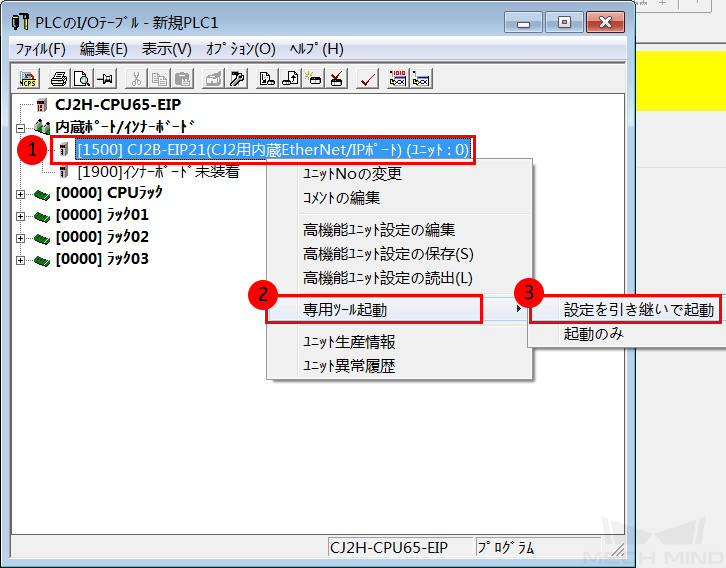
-
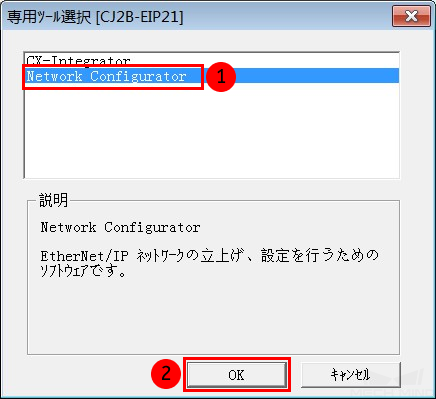
表示された 専用ツール選択[CJ2B-EIP21] ウィンドウで Network Configurator を選択して OK をクリックします。
-
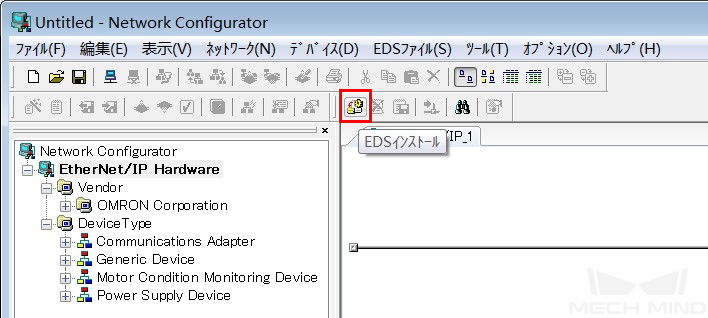
表示された Untitled - Network Configurator ウィンドウでは、ツールバーの EDS インストール をクリックすると EDSファイルのインストール ウィンドウが表示されます。
-
Software EIP.eds ファイルを見つけて選択し、開く をクリックします。
EDSファイルはIPCから取得できます。Software EIP.edsファイルは、Mech-VisionおよびMech-Vizソフトウェアのインストールディレクトリにある
Communication Component/Robot_Interface/EthernetIP/EDSフォルダに格納されます。EDSフォルダをCX-PROGRAMMERがインストールされているPCにコピーし、開く をクリックしてそのフォルダを指定します。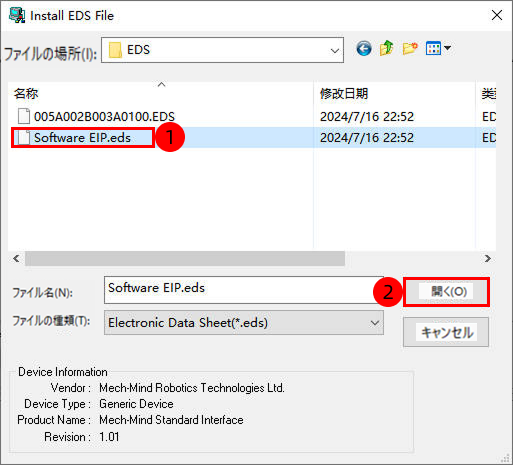
以下のウィンドウが表示された場合、はい をクリックしてアイコンをインストールします。
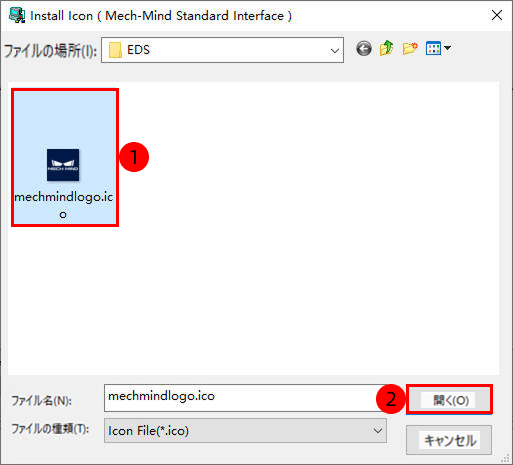
表示されたウィンドウで対応するアイコンファイルを選択し、開く をクリックします。
アイコンファイルは、前述のEDSファイルと同じフォルダ内にあります。
-
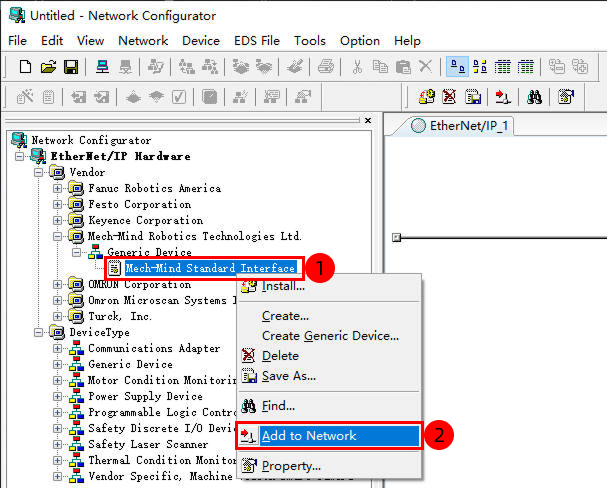
Untitled - Network Configurator ウィンドウでは、EtherNet/IP Hardware/Vendor/Mech-Mind Robotics Technologies Ltd./Generic Device を順に展開します。Mech-Mind Standard Interface を右クリックし、Add to Network を選択します。
-
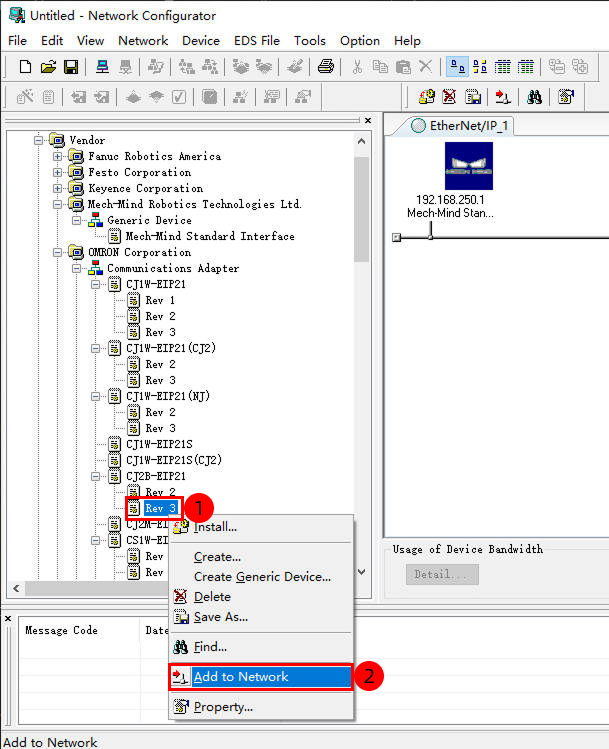
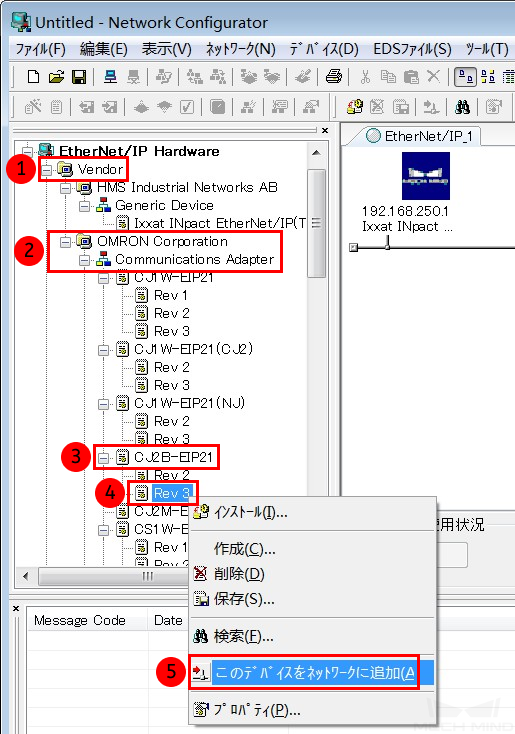
EtherNet/IP Hardware/Vendor/OMRON Corporation/Communications Adapter/CJ2B-EIP21 を同様の方法で展開し、Rev 3 を右クリックし、このデバイスをネットワークに追加 をクリックします。
-
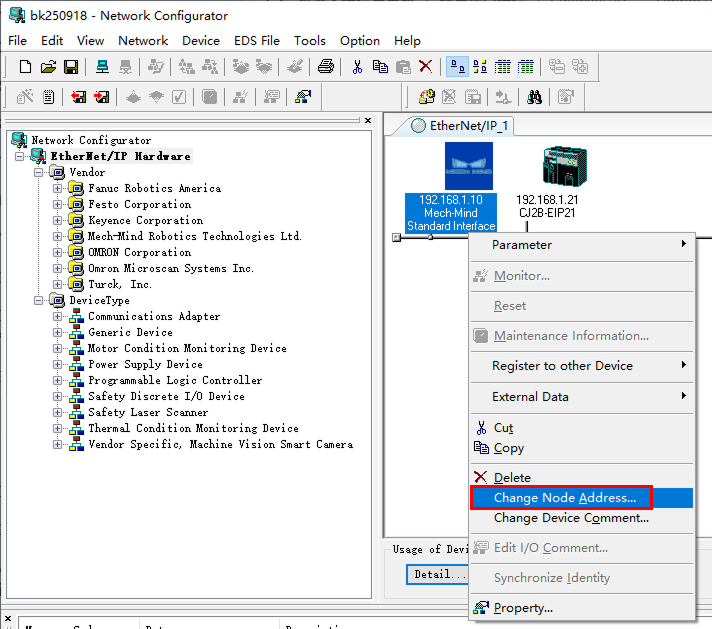
EtherNet/IP_1 ウィンドウで、以下の方法を使用してIPアドレスを変更します。
-
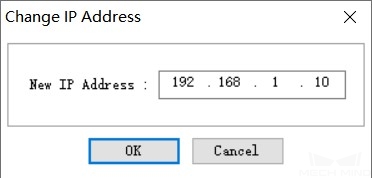
Mech-Mindのデバイスアイコンを右クリックし、ノードアドレスの変更 を選択し、ビジョンデバイスのIPアドレスを変更します。
ここで設定するIPアドレスは、Mech-Visionの「ロボット通信設定」で選択された ネットワークアダプターのIPアドレス と一致している必要があります。
-
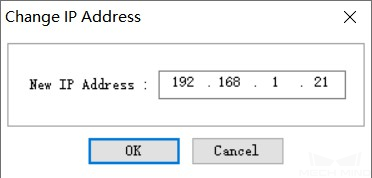
CJ2B-EIP21のデバイスアイコンを右クリックし、ノードアドレスの変更 を選択してPLCマスターのIPアドレスを変更します。ここで設定するIPアドレスは、I/Oテーブルの設定と同じである必要があります。
上図の2つのデバイスのIPアドレスは、同一ネットワークセグメント内にある必要があります。 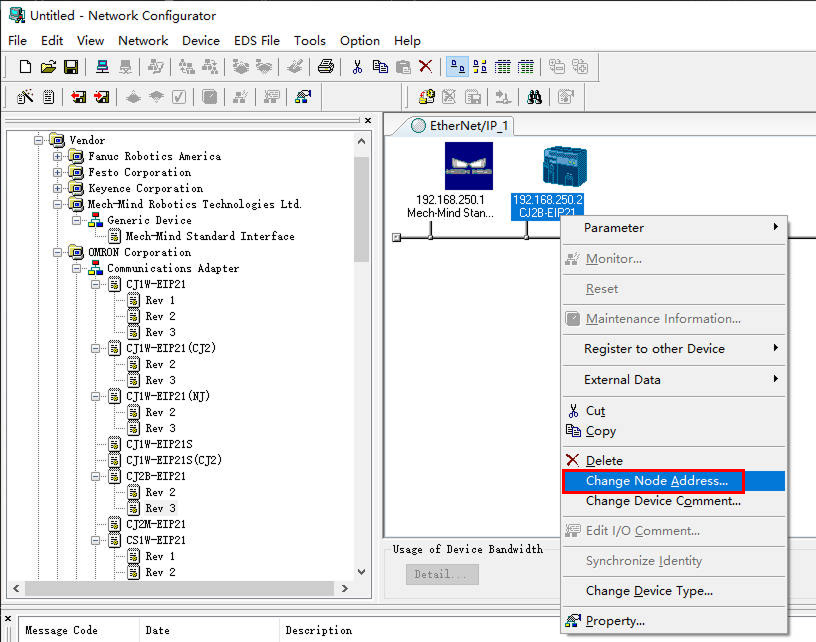
-
-
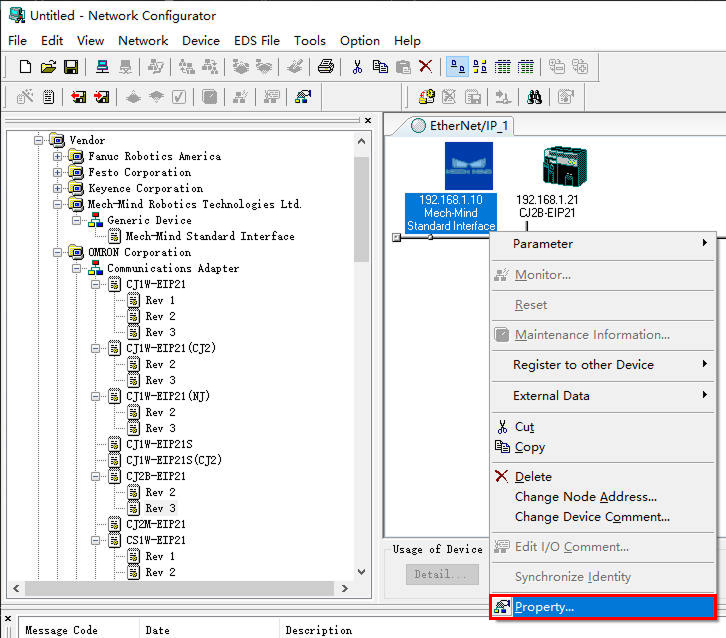
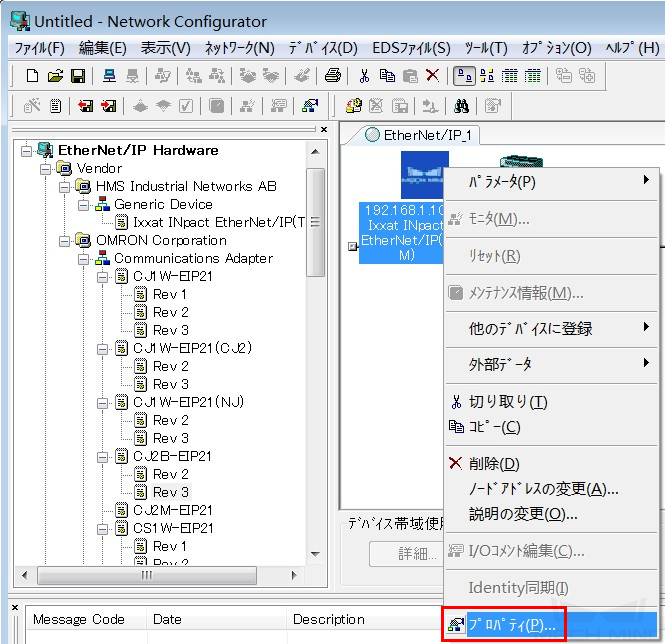
EtherNet/IP_1 ウィンドウでは、Mech-Mindアイコンを右クリックし、プロパティ をクリックします。
-
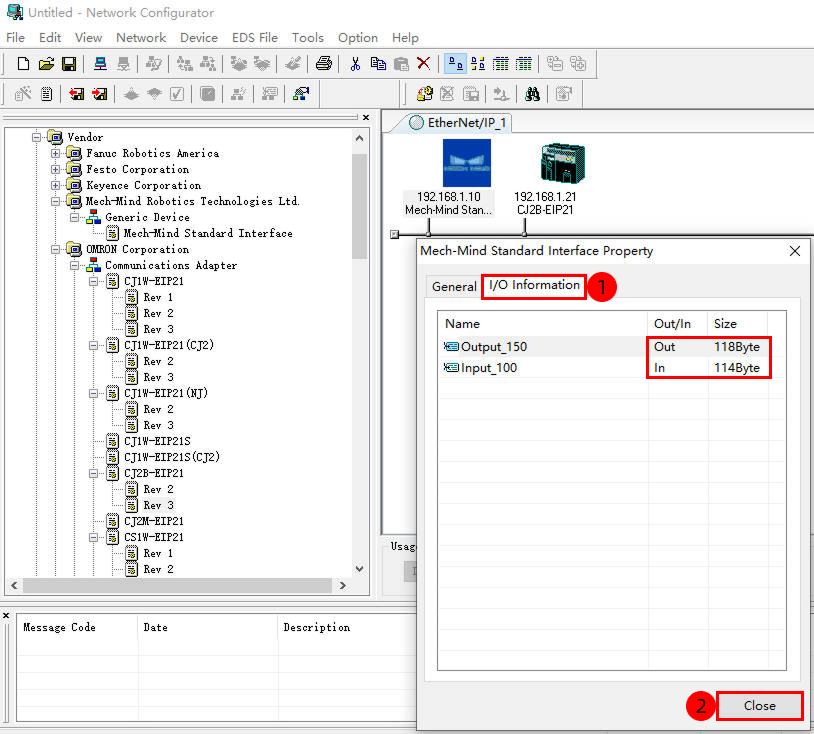
プロパティウィンドウでは、I/O情報 をクリックし、入力/出力のバイトサイズを確認して記録し、閉じる をクリックします。
-
EtherNet/IP_1 ウィンドウでは、CJ2B-EIP21アイコンをダブルクリックすると デバイスパラメータの編集 ウィンドウが表示されます。タブセット オプションを選択し、INとOUT第1ソフトコンポーネントをそれぞれ設定します(この例では第1ソフトコンポーネントのアドレス割り当てを示します)。登録完了後に デバイスパラメータの編集 ウィンドウに戻ります。

-
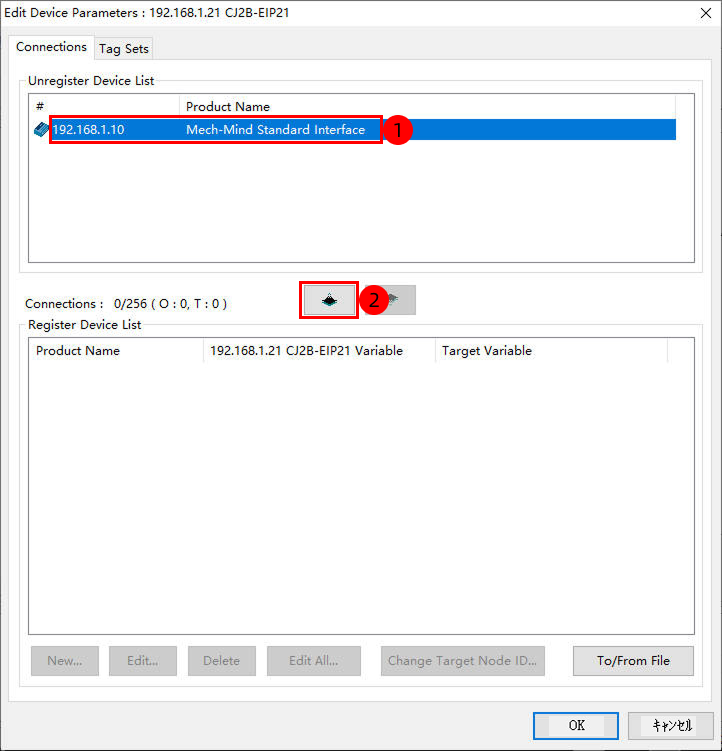
デバイスパラメータの編集 ウィンドウでは、Mech-Mind Standard Interface を選択し、クリックして下に移動し、登録ウィンドウでこのデバイスをダブルクリックします。すると、Edit Connection ウィンドウが表示されます。
-
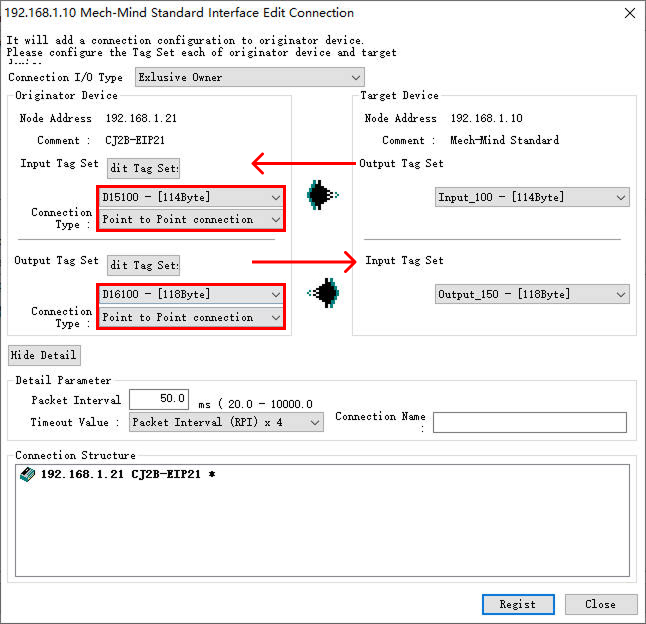
コネクション割付 ウィンドウでは、マスターとスレーブのIO信号を下図のように設定します。設定後、登録 をクリックしてから 閉じる をクリックします。
-
デバイスパラメータの編集 ウィンドウに戻り、対応数るリスト情報が表示された場合、OK をクリックします。
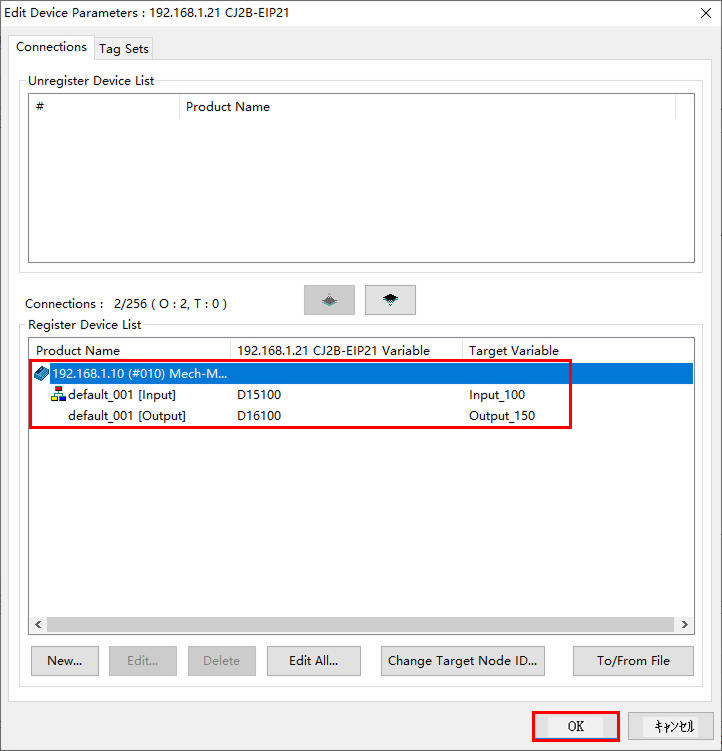
-
ビジョンスレーブの関連付けが完了すると、下図のようにアイコンが表示されます。
EtherNet/IP通信をハードウェアのPCI-eネットワークカードで実装する場合は、ここをクリックして詳細を表示します。
-
PLCのI/Oテーブル ウィンドウで、右クリックで を選択します。
-
表示された 専用ツール選択[CJ2B-EIP21] ウィンドウで Network Configurator を選択して OK をクリックします。
-
表示された Untitled - Network Configurator ウィンドウでは、ツールバーの EDS インストール をクリックすると EDSファイルのインストール ウィンドウが表示されます。
-
005A002B003A0100.EDS ファイルを見つけて選択し、開く をクリックします。
EDSファイルはIPCから取得できます。005A002B003A0100.EDSファイルは、Mech-VisionおよびMech-Vizソフトウェアのインストールディレクトリにある
Communication Component/Robot_Interface/EthernetIP/EDSフォルダに格納されます。EDSフォルダをCX-PROGRAMMERがインストールされているPCにコピーし、開く をクリックしてそのフォルダを指定します。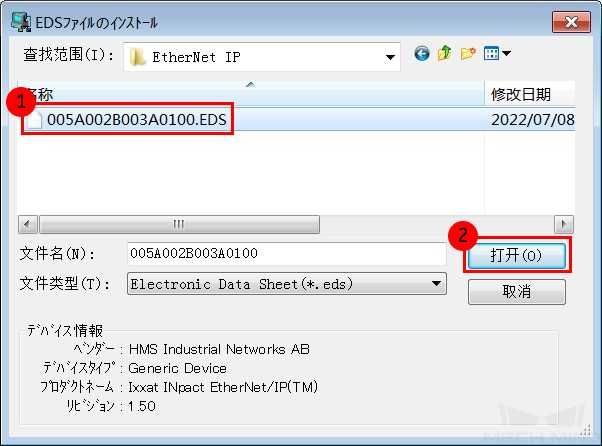
-
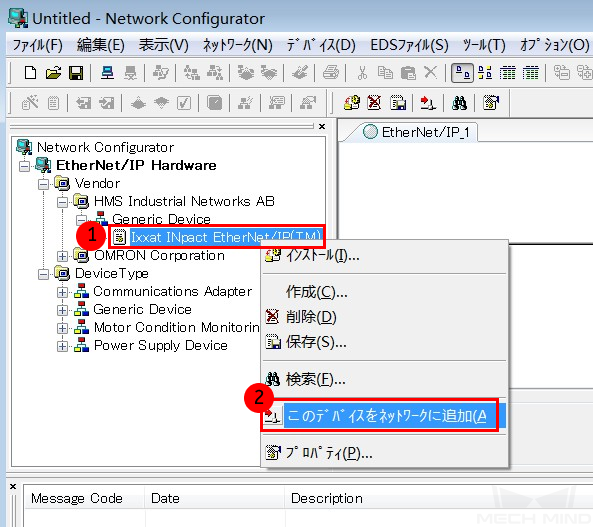
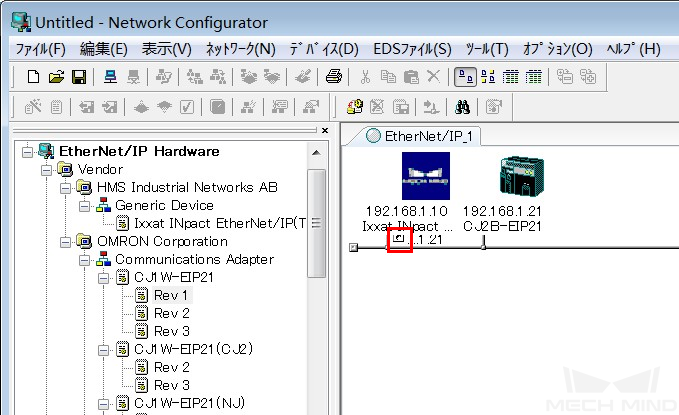
Untitled - Network Configurator ウィンドウでは、EtherNet/IP Hardware/Vendor/HMS Industrial Networks AB/Generic Device を展開し、Ixxat INpact EtherNet/IP(TM) を右クリックし、このデバイスをネットワークに追加 をクリックします。
-
EtherNet/IP Hardware/Vendor/OMRON Corporation/Communications Adapter/CJ2B-EIP21 を同様の方法で展開し、Rev 3 を右クリックし、このデバイスをネットワークに追加 をクリックします。
-
EtherNet/IP_1 ウィンドウで、以下の方法を使用してIPアドレスを変更します。
-
Mech-Mindのデバイスアイコンを右クリックし、ノードアドレスの変更 を選択し、ビジョンデバイスのIPアドレスを変更します。
ここで設定するIPアドレスは、HMS IPconfigで設定したIPアドレスと一致している必要があります。
-
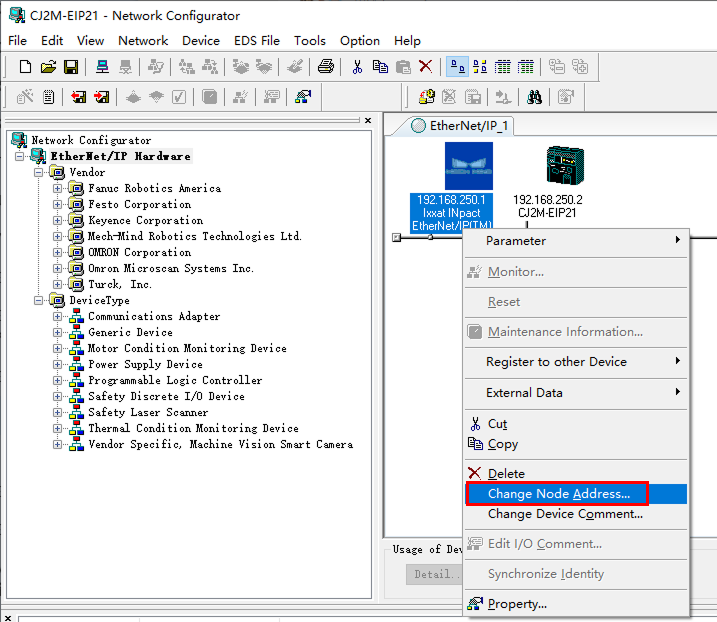
CJ2B-EIP21のデバイスアイコンを右クリックし、ノードアドレスの変更 を選択してPLCマスターのIPアドレスを変更します。ここで設定するIPアドレスは、I/Oテーブルの設定と同じである必要があります。
上図の2つのデバイスのIPアドレスは、同一ネットワークセグメント内にある必要があります。 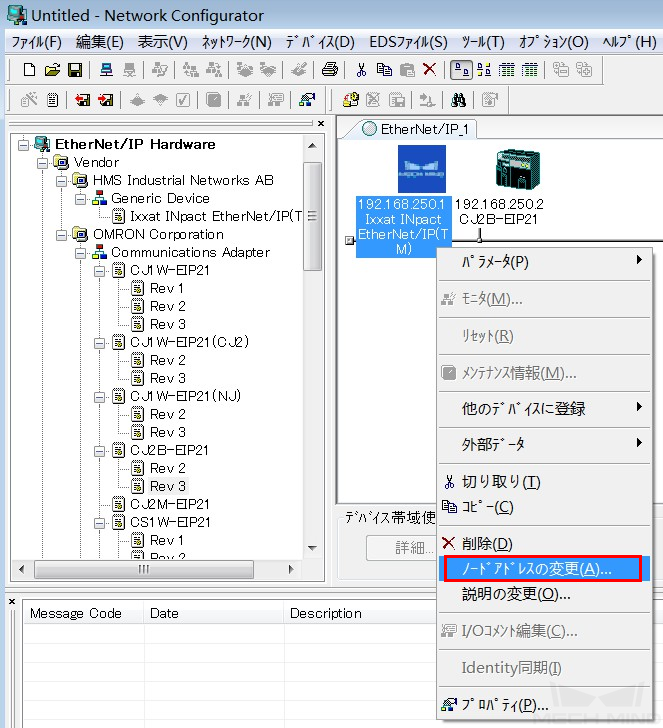
-
-
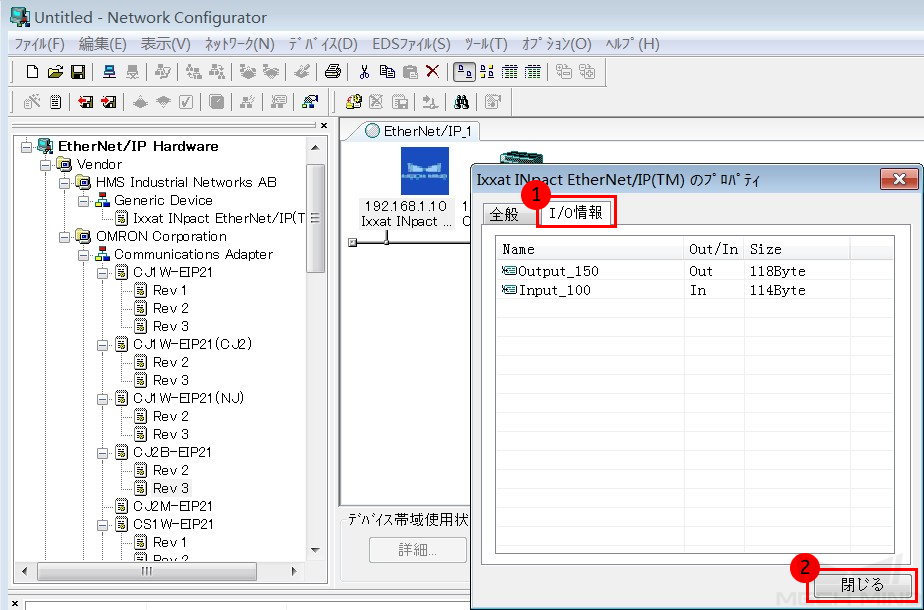
EtherNet/IP_1 ウィンドウでは、Mech-Mindアイコンを右クリックし、プロパティ をクリックします。
-
プロパティウィンドウでは、I/O情報 をクリックし、入力/出力のバイトサイズを確認して記録し、閉じる をクリックします。
-
EtherNet/IP_1 ウィンドウでは、CJ2B-EIP21アイコンをダブルクリックすると デバイスパラメータの編集 ウィンドウが表示されます。タブセット オプションを選択し、INとOUT第1ソフトコンポーネントをそれぞれ設定します(この例では第1ソフトコンポーネントのアドレス割り当てを示します)。登録完了後に デバイスパラメータの編集 ウィンドウに戻ります。
-
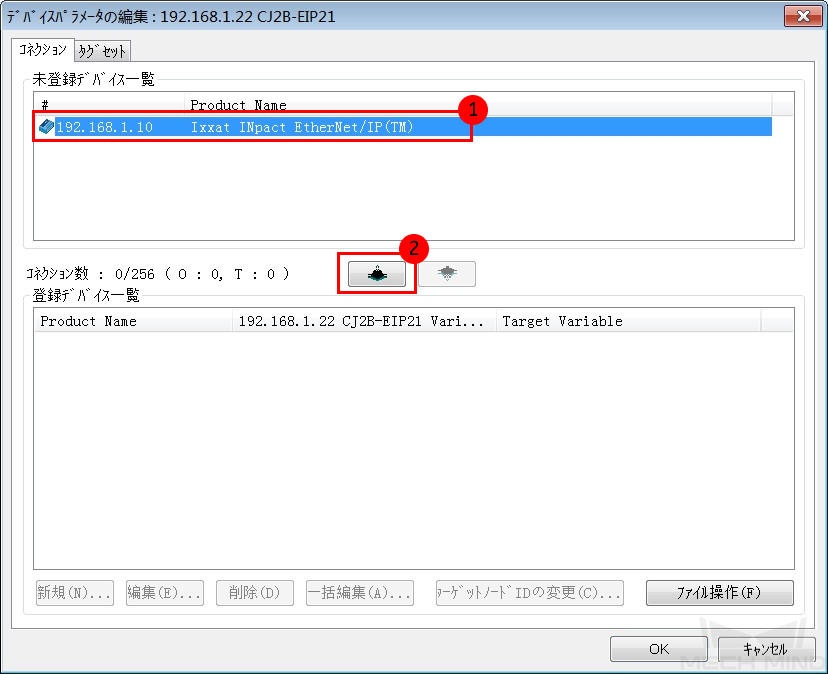
デバイスパラメータの編集 ウィンドウでは、Ixxat INpact EtherNet/IP(TM) を選択し、クリックして下に移動し、登録ウィンドウでこのデバイスをダブルクリックします。すると、コネクション割付 ウィンドウが表示されます。
-
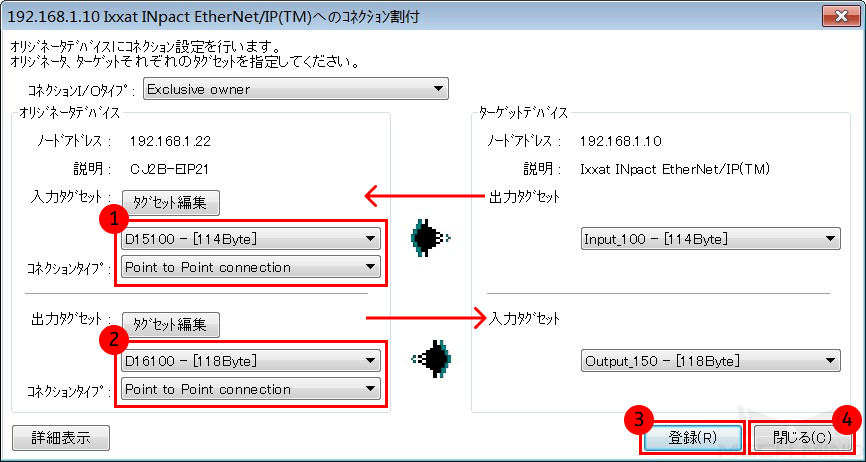
コネクション割付 ウィンドウでは、マスターとスレーブのIO信号を下図のように設定します。設定後、登録 をクリックしてから 閉じる をクリックします。
-
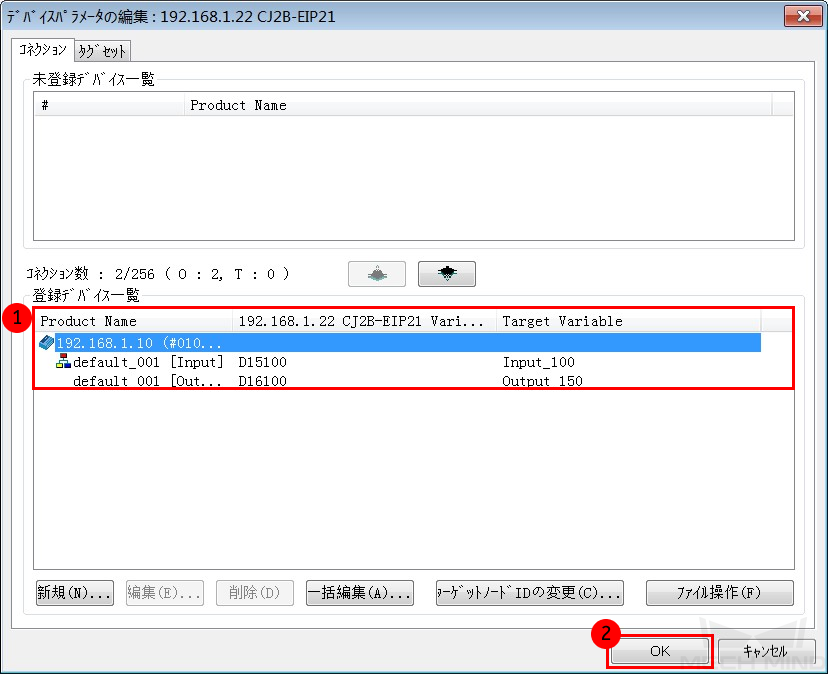
デバイスパラメータの編集 ウィンドウに戻り、対応数るリスト情報が表示された場合、OK をクリックします。
-
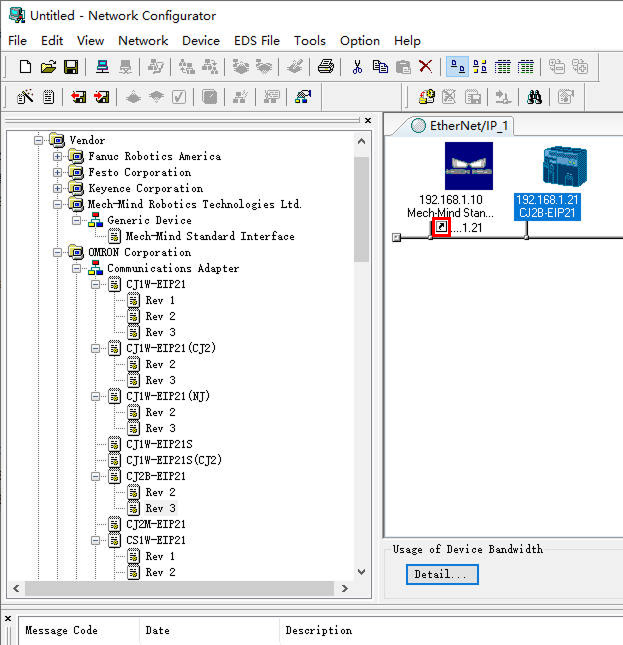
ビジョンスレーブの関連付けが完了すると、下図のようにアイコンが表示されます。
PLCハードウェア構成をPLCにダウンロード
EtherNet/IP通信をソフトウェア設定で実装する場合は、ここをクリックして詳細を表示します。
-
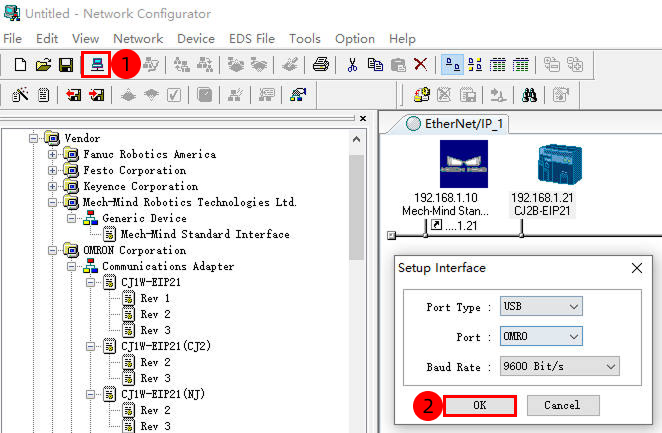
Network Configurator ウィンドウでは、接続 をクリックすると インターフェースの設定 ウィンドウが表示されます。OK をクリックすると、接続ネットワークポートの選択 ウィンドウが表示されます。
-
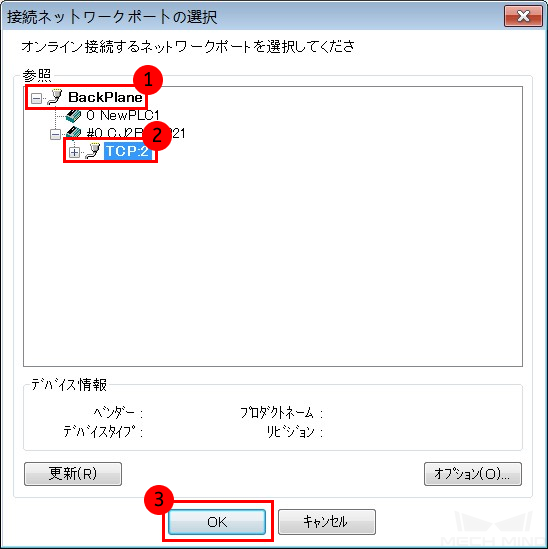
接続ネットワークポートの選択 ウィンドウでは、*BackPlane/#0 CJ2B-EIP21/TCP:2*を展開し、OK をクリックします。
-
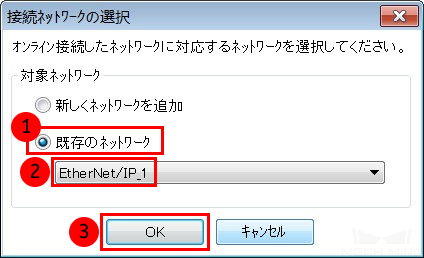
表示された 接続ネットワークポートの選択 ウィンドウで、既存のネットワークを使用 を選択し、EtherNet/IP_1 を選択して OK をクリックします。
-
Network Configurator ウィンドウでは、ネットワークにダウンロード をクリックし、表示されたウィンドウで はい をクリックします。
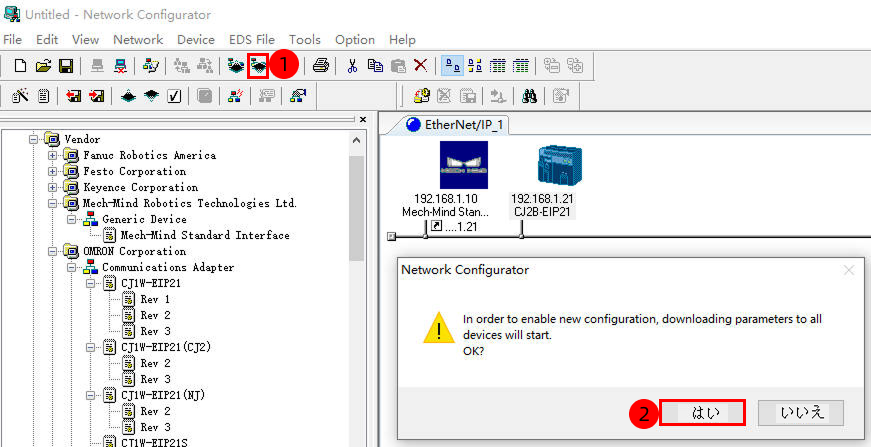
-
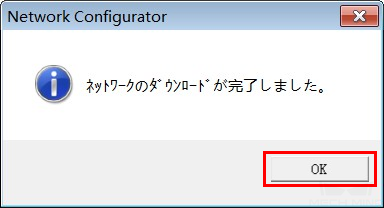
正常にダウンロードできたら、OK をクリックします。
EtherNet/IP通信をハードウェアのPCI-eネットワークカードで実装する場合は、ここをクリックして詳細を表示します。
-
Network Configurator ウィンドウでは、接続 をクリックすると インターフェースの設定 ウィンドウが表示されます。OK をクリックすると、接続ネットワークポートの選択 ウィンドウが表示されます。
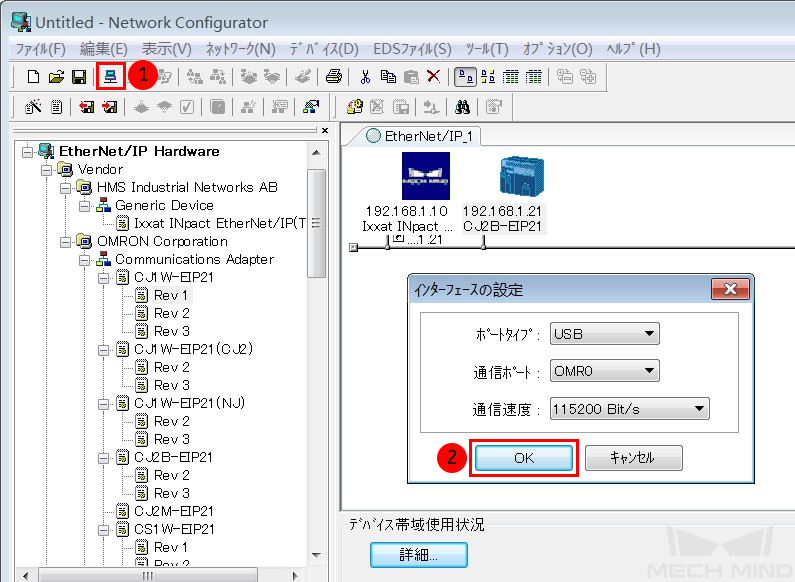
-
接続ネットワークポートの選択 ウィンドウでは、*BackPlane/#0 CJ2B-EIP21/TCP:2*を展開し、OK をクリックします。
-
表示された Select Connected Network ウィンドウでは、Use the existing network を選択し、EtherNet/IP_1 を選択してから、OK をクリックします。
-
Network Configurator ウィンドウでは、ネットワークにダウンロード をクリックし、表示されたウィンドウで はい をクリックします。
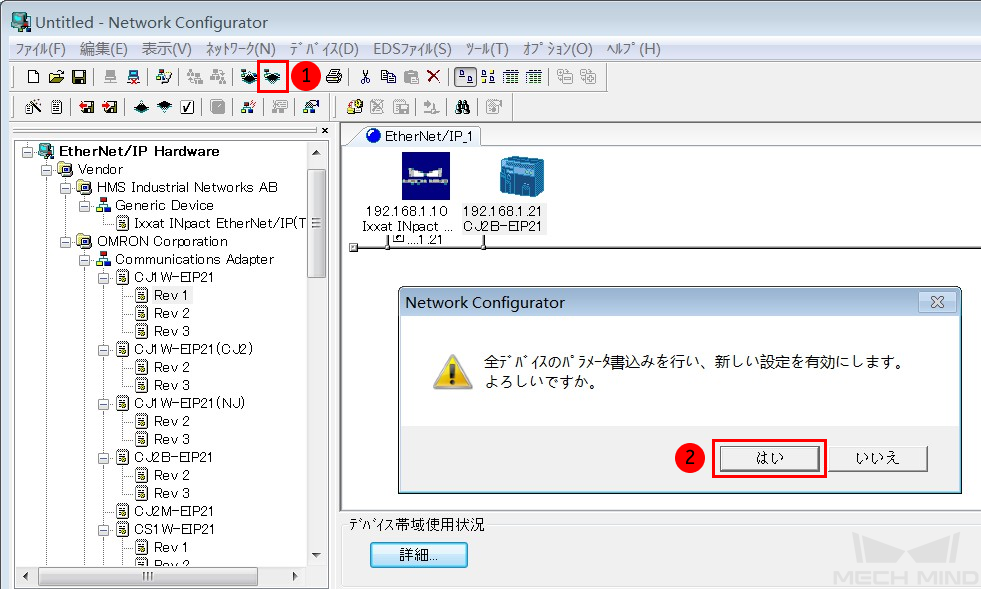
-
正常にダウンロードできたら、OK をクリックします。
通信が成立しているか確認
-
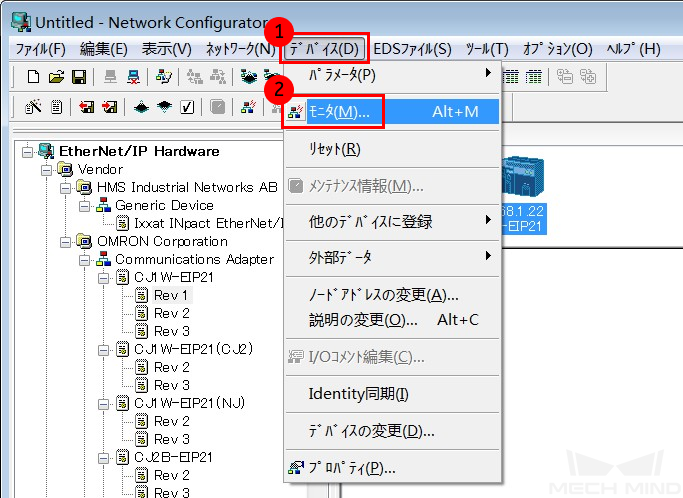
Untitled-Network Configurator ウィンドウでは、メニューバーの をクリックします。
-
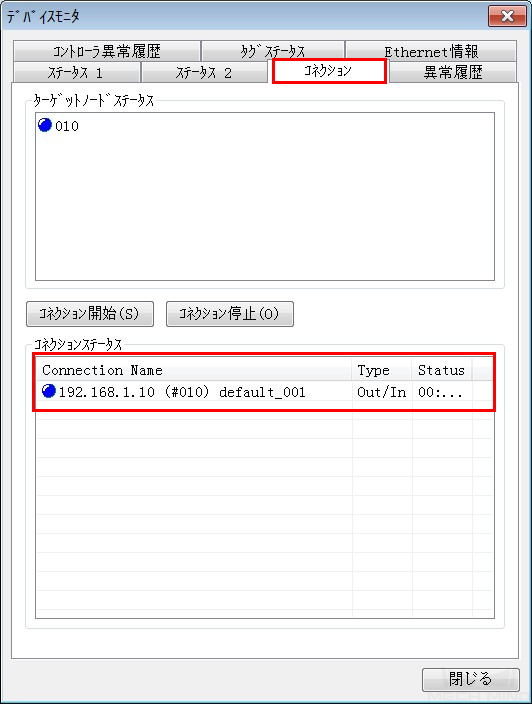
表示された Monitor Device ウィンドウで コネクション をクリックします。正常に接続できた場合は、接続状態表示が青色で表示されます。
-
Mech-Visionのメインインターフェイスで、接続ができたら、ログバーの コンソール タブに、ETHERNET IPコントローラへの接続に成功しました というメッセージが表示されます。 このようなログメッセージがない場合は、以下の設定が正しいかどうか確認してください。
-
ハードウェアのネットワーク接続が正常に行われているかどうか。
-
Mech-Visionのインターフェースサービスが有効になっているかどうか。
-
PLCは、ダウンロードされ、PLCのハードウェアにインポートされているかどうか。
-
サンプルファイルをインポートしてPLCプログラムをPLCにダウンロード
| Mech-Mindサンプルプログラムファイルをインポートしてテストするために、新しいPLCプロジェクトを使用する必要があります。既存のPLCプロジェクトに追加する場合は、新しいプロジェクトを作成して、インポートとテストを行ってから、既存のプロジェクトに移転することをお勧めします。 |
Mech-Mindサンプルプログラムファイルをインポート
-
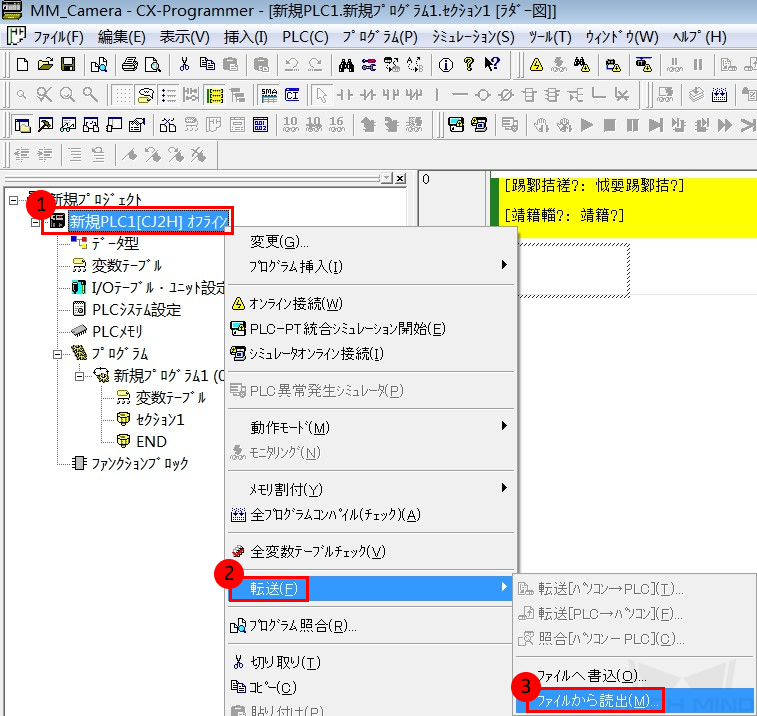
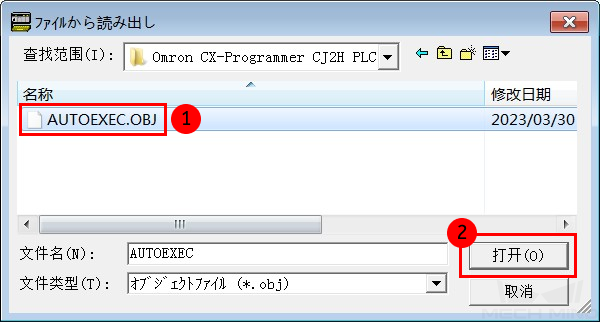
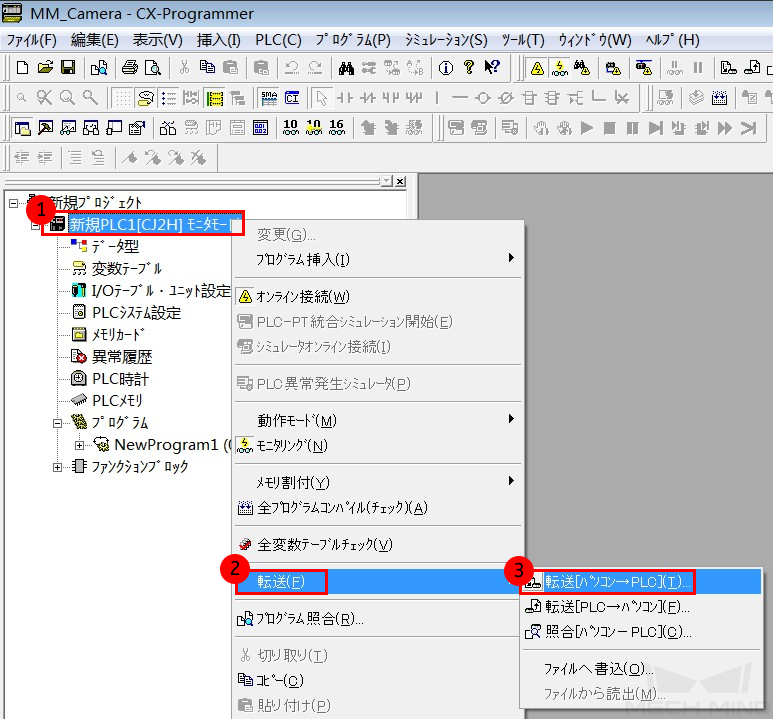
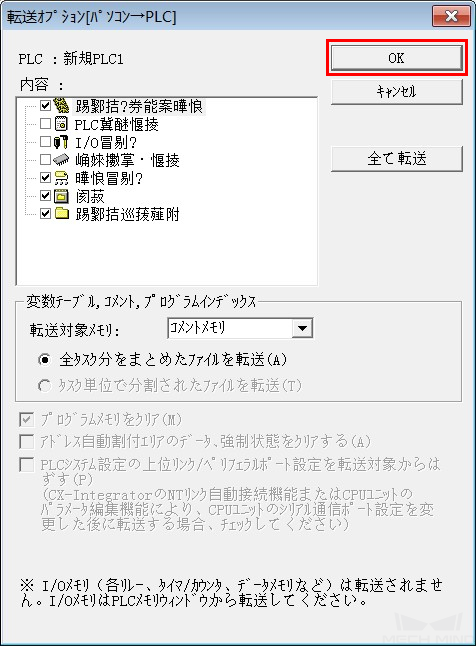
CX-Programmerに戻り、「新規PLC1[CJ2H]オフライン > 転送 > ファイルから読出」を選択すると、ファイルから読み出し のウィンドウが表示されます。
-
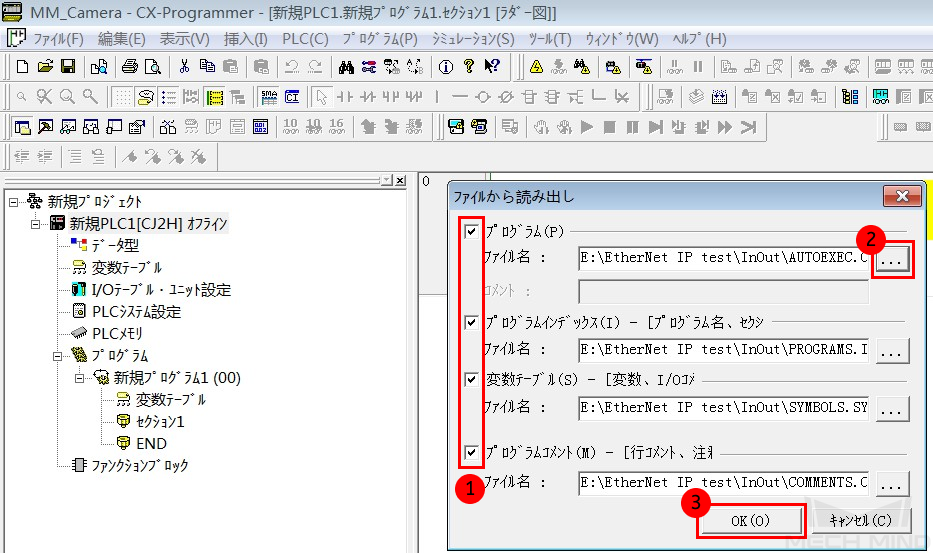
プログラム、プログラムインデックス、変数テーブル と プログラムコメント にチェックを入れます。プログラム の後ろの … をクリックし、対応するOBJファイルを選択してから 開く をクリックします。同じディレクトリに他のファイルがある場合は、自動的にファイルが記入され、最後に OK をクリックします。
-
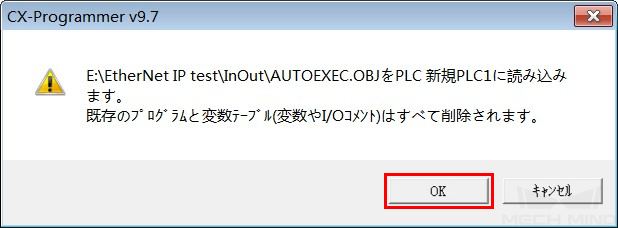
すると、警告ウィンドウが表示されます。読み込みをすると、保存されたすべてのプログラム、符号やコメントが削除されるので、必ず新規作成されたプロジェクトを使用して読み込みます。OK をクリックし、サンプルプロジェクトをインポートします。

ビジョンプロジェクトをテスト
ここでは、サンプルプログラム機能ブロックを使用して、Mech-Visionプロジェクトを実行してビジョンポイントを取得する方法、Mech-Vizプロジェクトを実行して計画した経路を取得する方法について説明します。IOモジュールの機能説明については、オムロン PLCとMech-MindシステムとのEtherNet/IP通信コマンド説明 をご参照ください。
事前準備
-
Mech-Visionソフトウェアに戻り、Mech-Visionプロジェクトを構築します。ソリューションを右クリックして ソリューションを自動的に読み込む にチェックを入れます。すると、ソリューション内のプロジェクトも自動読み込みに設定され、プロジェクト名の前に番号が表示されます。
-
Mech-Vizプロジェクトを作成します。Mech-Vizのリソースパネルでプロジェクトを右クリックし、自動的に読み込む にチェックを入れます。
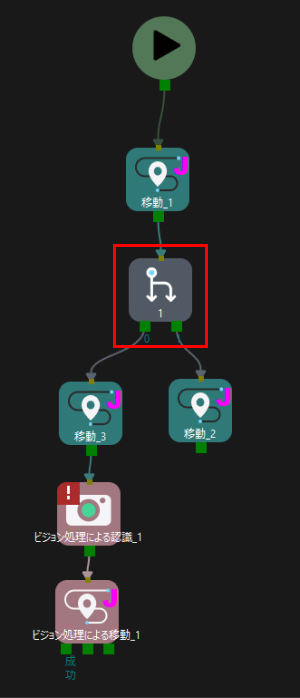
テストのためのMech-Vizプロジェクトでは、下図のように、ステップ名が1の「メッセージによって異なる分岐を実行」を使用する必要があります。
Mech-Visionからビジョンポイントを取得
パラメータ設定
-
CX-Programmerに戻って、プロジェクトツリーでプログラムを展開し、CameraTest プログラムをダブルクリックし、ToCamera.COM_ENABLEの状態を常にONに設定します。

-
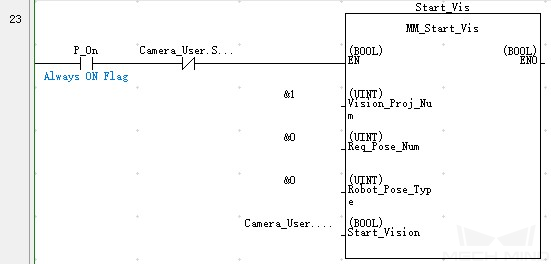
Mech-Visionプロジェクト番号(Mech-Visionプロジェクトリストでプロジェクト名の前にある番号)を設定します。VISION_PROJ_NUMの値を1に設定すると、プロジェクト番号1のMech-Visionプロジェクトが実行されます。
-
Mech-Visionプロジェクトから返される位置姿勢の数を設定します。REQ_POSE_NUMの値を0に設定すると、Mech-Visionからすべての位置姿勢の結果が返されます。
Mech-Visionプロジェクトを実行
-
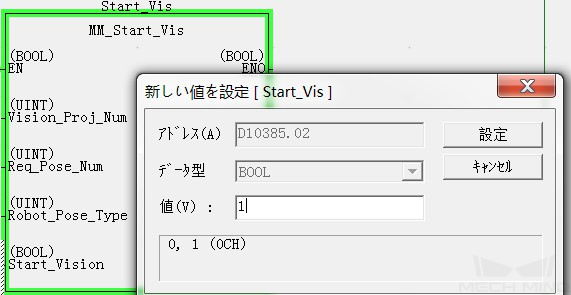
機能ブロックMM_Start_Visの入力変数Start_Visをダブルクリックし、表示された 新しい値を設定 ウィンドウで変数の値を1に設定します。設定 をクリックしてMech-Visionプロジェクトを実行させ、カメラが撮影を開始します。その後、同様の方法でこの変数の値を0にリセットします。
-
ウォッチウィンドウ切替 のアイコンをクリックし、名称 の列からFromCamera.STATUS_CODEを検索し、その返された値を確認します。1102の場合、プロジェクトが正常に実行されたことを意味します。返された値が10XXの場合、標準インターフェースのステータスコード一覧とトラブルシューティング を参照して問題を解決してください。


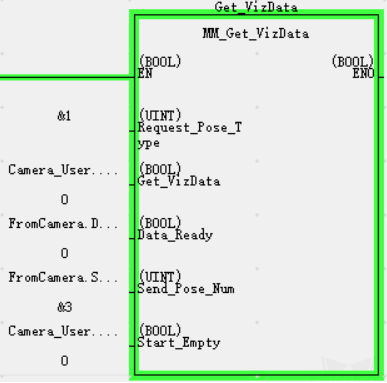
Mech-Visionで計算した位置姿勢の結果を取得
-
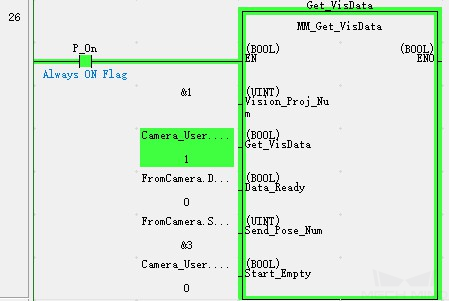
FromCamera.STATUS_CODEが1102を返したら、機能ブロックMM_Get_VisDataの入力変数Get_VisDataをダブルクリックします。表示された 新しい値を設定 ウィンドウで変数の値を1に設定し、設定 をクリックして位置姿勢の取得を開始します。その後、同様の方法でこの変数の値を0にリセットします。下図に示すように、SendPoseNumの値が3の場合、3つの位置姿勢が取得されたことを意味します。

-
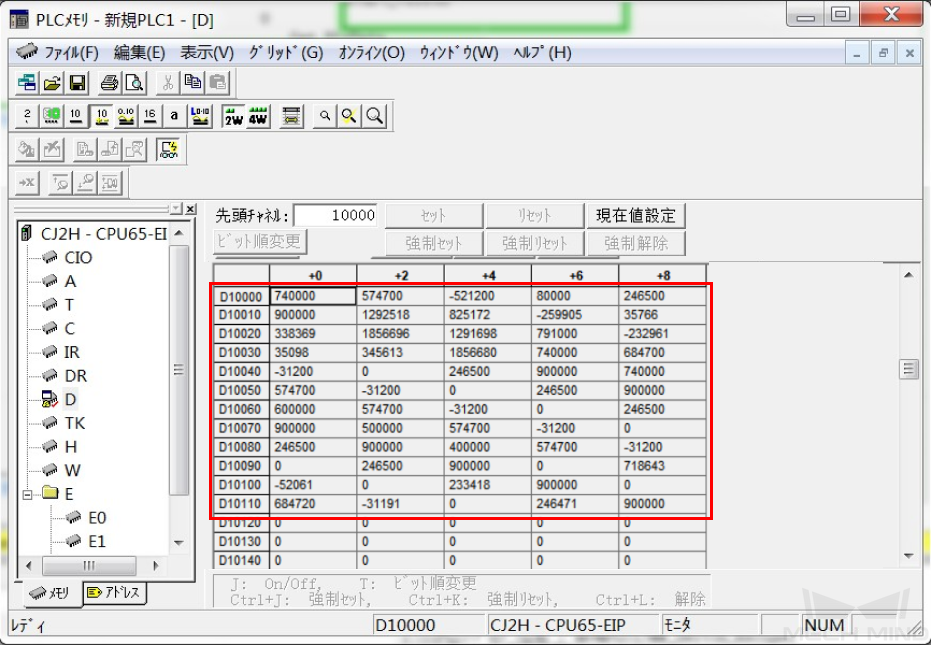
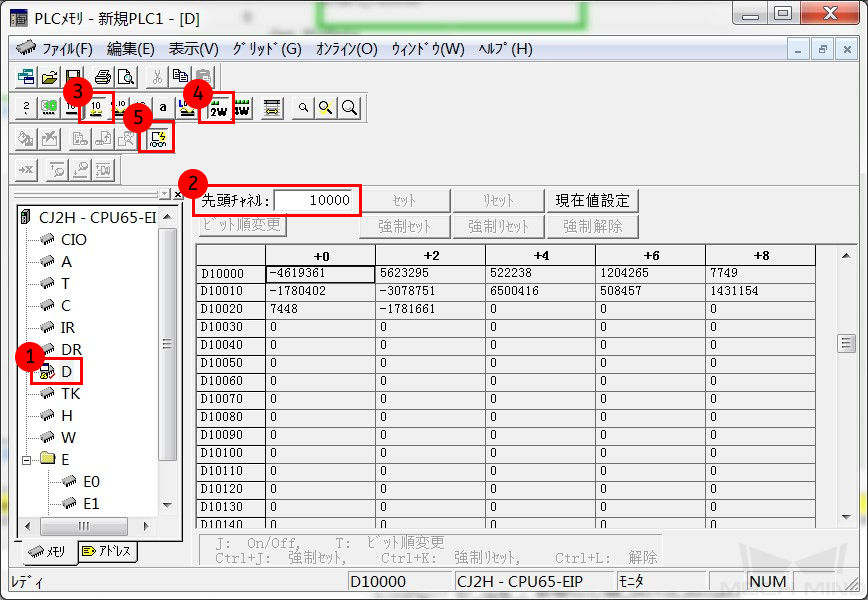
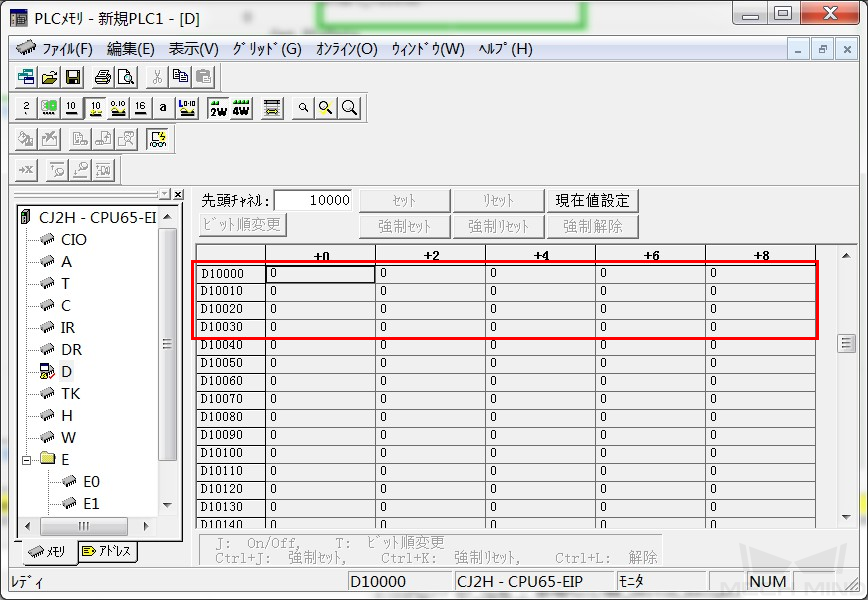
プロジェクトツリーで、D をダブルクリックすると、PLCメモリ のウィンドウが表示されます。D メモリテーブルをダブルクリックし、前頭チャネルを 10000 に設定し、データの表示形式を 符号付き10進数、ダブルワード に設定してから、モニタ をクリックします。この例は、ビジョンソフトウェアから送信された3セットの位置姿勢データ(送信値を1万倍に拡大したもの)を受信します。




Mech-Vizによって計画された経路を取得
パラメータ設定
-
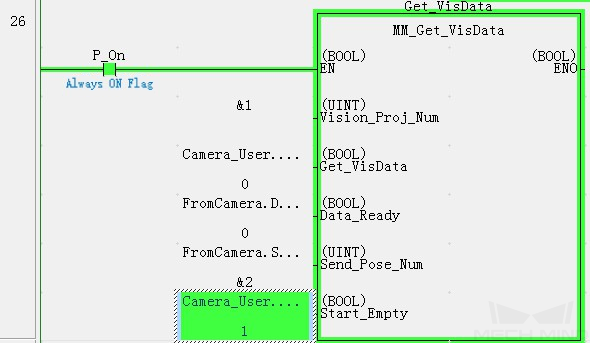
CX-Programmerウィンドウに戻り、機能ブロック MM_Get_VisData の入力変数 Start_Empty をダブルクリックします。すると、新しい値を設定 ウィンドウが表示されます。変数の値を 1 に変更し、設定 をクリックして前回に取得したビジョン結果を削除します。その後、同様の方法でこの変数の値を 0 にリセットします。
-
Branch_Nameの値を 1、Branch_Exit_Portの値を 1 と設定すると、Mech-Vizプロジェクトは分岐1まで実行する場合、出口1に沿って実行し続けます。
-
Request_Pose_Typeの値を 1、Mech-Vizから返されるデータのタイプを関節角度に設定します。
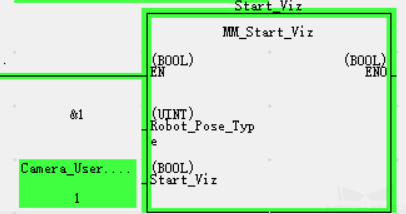
Mech-Vizプロジェクトを実行
-
モジュール「MM_Start_Viz」で、入力変数 Start_Vizダブルクリックして、Mech-Vizプロジェクトを実行します。
-
FromCamera.STATUS_CODEからの戻り値を確認し、2103になった場合、プロジェクトの実行ができたと表しています。一方、戻り値は20XXになった場合、標準インターフェースエラーコード一覧とトラブルシューティング をご参照ください。

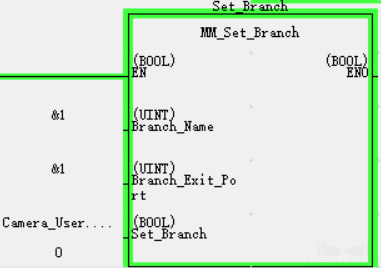
Mech-Vizの分岐出口を選択
-
機能ロック「M_Set_Branch」で、入力変数 Set_Branch をダブルクリックし、Mech-Viz分岐出口を選択します。
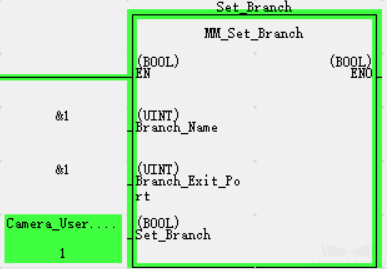
-
FromCamera.STATUS_CODEの現在値を確認し、2105になった場合、分岐の設定ができたことを示します。一方、戻り値は20XXになった場合、標準インターフェースエラーコード一覧とトラブルシューティング をご参照ください。

Mech-Vizの経路計画を取得
-
機能ロック「MM_Set_Branch」で、入力変数 Get_VizData をダブルクリックし、Mech-Vizの計画経路を取得します。
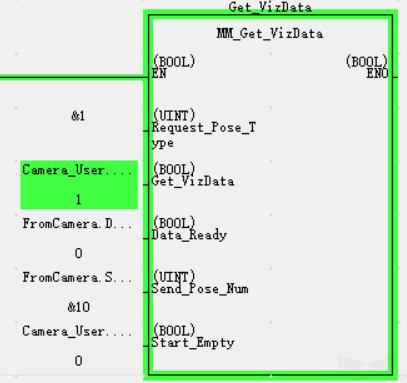
-
FromCamera.STATUS_CODEの現在値を確認し、2100になった場合、Mech-Vizの計画経路を取得することができたと示します。一方、現在値は20XXになった場合、標準インターフェースエラーコード一覧とトラブルシューティング をご参照ください。結果は下図のように、SendPoseNumの値が10であるため、10グループの関節角度データを取得しました。関節角度のデータはTargetPoseに格納されます。

-
PLCメモリ ウィンドウに戻り、10セットの位置姿勢データ(送信値を1万倍に拡大したもの)を下図のようになります。