MM_S21_Vis_As_Uframe
プログラム概要
機能 |
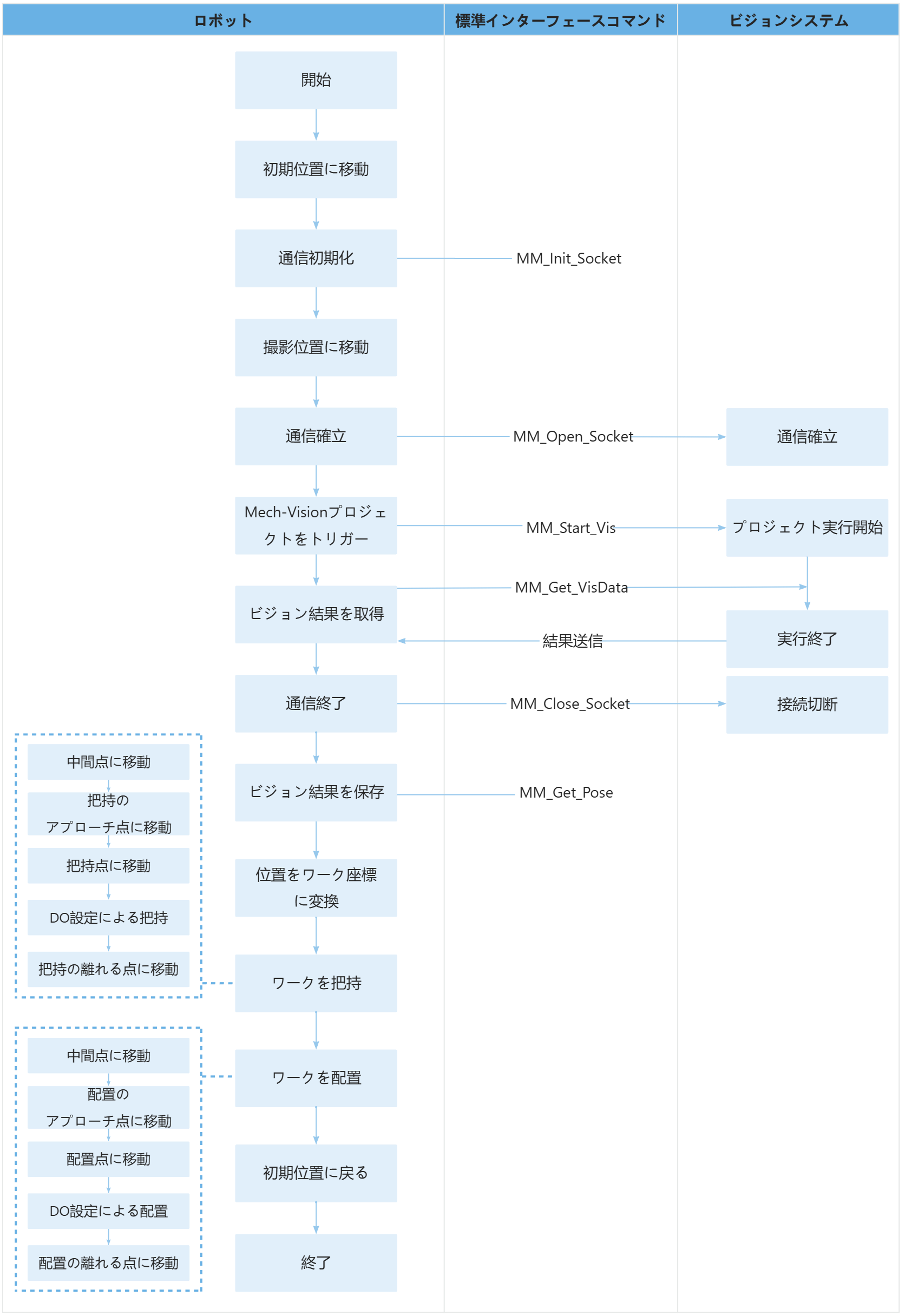
ロボットがMech-Visionプロジェクトを実行してビジョン結果を取得し、ビジョン結果をワーク座標系として用いて、把持および配置動作のフローを実行します。 |
||
ファイルパス |
Mech-VisionとMech-Vizソフトウェアのインストールディレクトリにある
|
||
必要なプロジェクト |
Mech-Visionプロジェクト |
||
使用前提 |
|
| このサンプルプログラムは参考用です。ユーザーは実際の状況に応じて、このプログラムを基に変更を加える必要があります。このプログラムをそのまま使用しないでください。 |
プログラム説明
以下はMM_S21_Vis_As_Uframeサンプルプログラムのコードと関連する説明です。
| MM_S1_Vis_Basicサンプルと比較して、このサンプルではビジョン結果をユーザー座標系(ワーク座標系など)として使用し、把持を行います。そのため、MM_S1_Vis_Basicサンプルと同じ部分のコードについては、以下で再度説明することはありません(詳細は MM_S1_Vis_Basicサンプルの説明 をご参照ください)。 |
MODULE MM_S21_Vis_As_Uframe
!----------------------------------------------------------
! FUNCTION: trigger Mech-Vision project and get vision result
! Mech-Mind, 2026-1-28
!----------------------------------------------------------
!define local num variables
LOCAL VAR num pose_num:=0;
LOCAL VAR num status:=0;
LOCAL VAR num label:=0;
LOCAL VAR num toolid:=0;
!define local joint&pose variables
LOCAL CONST jointtarget home:=[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL CONST jointtarget snap_jps:=[[0,0,0,0,90,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget camera_capture:=[[380.58,24.66,583.22],[0.00392748,-0.815898,0.578164,-0.00464691],[0,0,-2,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
LOCAL PERS robtarget pick_waypoint:=[[502.38,26.91,592.51],[0.00179326,-0.458155,0.888868,-0.0019068],[0,-1,-1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
LOCAL PERS robtarget pickpoint:=[[0,0,0],[1,0,0,0],[0,-1,-1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
LOCAL PERS robtarget Wobjpoint:=[[0,0,0],[1,0,0,0],[0,0,0,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
LOCAL PERS robtarget drop_waypoint:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
LOCAL PERS robtarget drop:=[[302.00,0.00,558.00],[0,0,-1,0],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
!define LOCAL tooldata variables
LOCAL PERS tooldata gripper1:=[TRUE,[[0,0,0],[1,0,0,0]],[0.001,[0,0,0.001],[1,0,0,0],0,0,0]];
!define LOCAL wobjdata variables
TASK PERS wobjdata MM_Wobj:=[FALSE,TRUE,"",[[0,0,0],[1,0,0,0]],[[639.64,-59.7632,41.2964],[0.0326084,-0.429607,0.901024,0.0503118]]];
PROC Sample_21()
!set the acceleration parameters
AccSet 50,50;
!set the velocity parameters
VelSet 50,1000;
!move to robot home position
MoveAbsJ home\NoEOffs,v3000,fine,gripper1\WObj:=MM_Wobj;
!initialize communication parameters (initialization is required only once)
MM_Init_Socket "127.0.0.1", 50000, 300;
!move to image-capturing position
MoveL camera_capture,v1000,fine,gripper1;
!open socket connection
MM_Open_Socket status;
IF status=3099 THEN
TPWrite "MM: Communication Error";
STOP;
ENDIF
!trigger NO.1 Mech-Vision project
MM_Start_Vis 1,0,2,snap_jps,status;
IF status<>1102 THEN
!add error handling logic here according to different error codes
TPWrite "MM: Status Error";
STOP;
ENDIF
!get vision result from NO.1 Mech-Vision project
stop;
MM_Get_VisData 1,pose_num,status;
!check whether vision result has been got from Mech-Vision successfully
IF status<>1100 THEN
!add error handling logic here according to different error codes
!e.g.: status=1003 means no point cloud in ROI
!e.g.: status=1002 means no vision result
Stop;
ENDIF
!close socket connection
MM_Close_Socket;
!save first vision point data to local variables
MM_Get_Pose 1,Wobjpoint,label,toolid;
!Convert the visual points to the workpiece coordinates
MM_Wobj.oframe.trans:=Wobjpoint.trans;
MM_Wobj.oframe.rot:=Wobjpoint.rot;
!move to intermediate waypoint of picking
MoveJ pick_waypoint,v1000,z50,gripper1;
!move to approach waypoint of picking
MoveL RelTool(pickpoint,0,0,-100), v1000, fine, gripper1\WObj:=MM_Wobj;
!move to picking waypoint
MoveL pickpoint, v300, fine, gripper1\WObj:=MM_Wobj;
!add object grasping logic here, such as "setdo DO_1, 1;"
Stop;
!move to departure waypoint of picking
MoveL RelTool(pickpoint,0,0,-100), v1000, fine, gripper1\WObj:=MM_Wobj;
!move to intermediate waypoint of placing
MoveJ drop_waypoint,v1000,z50,gripper1;
!move to approach waypoint of placing
MoveL RelTool(drop,0,0,-100),v1000,fine,gripper1;
!move to placing waypoint
MoveL drop,v300,fine,gripper1;
!add object releasing logic here, such as "setdo DO_1, 0;"
Stop;
!move to departure waypoint of placing
MoveL RelTool(drop,0,0,-100),v1000,fine,gripper1;
!move back to robot home position
MoveAbsJ home\NoEOffs,v3000,fine,gripper1;
ENDPROC
ENDMODULE上記のサンプルプログラムの処理流れは、下図の通りです。
下表は追加されたコードとその説明です。コマンド名のリンクをクリックすることで、その詳細を確認できます。
| 処理流れ | コートと説明 | ||
|---|---|---|---|
変数を定義 |
Wobjpoint は、Mech-Visionから取得したビジョンポイントを格納するために使用します。pickpoint 変数は、ワーク座標系における把持位置姿勢を格納するために使用します。 |
||
ビジョンポイントのツール位置姿勢を保存し、ワーク座標系 MM_Wobj に代入 |
まず、MM_Get_Pose コマンドを使用してビジョン結果を変数 |
||
把持と配置を実行 |
|