Why are DO or DI Signals Occasionally Enabled or Disabled in Advance for ABB Robots in Master-Control Communication?
Problem
When the Master-Control communication is set up between an ABB robot and the vision system and the robot has not reached the target position, DI or DO signals are enabled or disabled in advance.
Cause
The stop button is pressed on the teach pendant (at this point, the foreground program is stopped and not reset) and then the Mech-Viz project is stopped (at this point, the background program is stopped and not reset). This will cause the foreground program to remain unreset. If you continue running the program the next time, movement may be chaotic due to the uncleared, previously sent movement positions in the foreground program. Thus, do not send commands while the foreground program is stopped.
Solution
Reset the foreground program for the ABB robot before running the Mech-Viz project by performing the following operations:
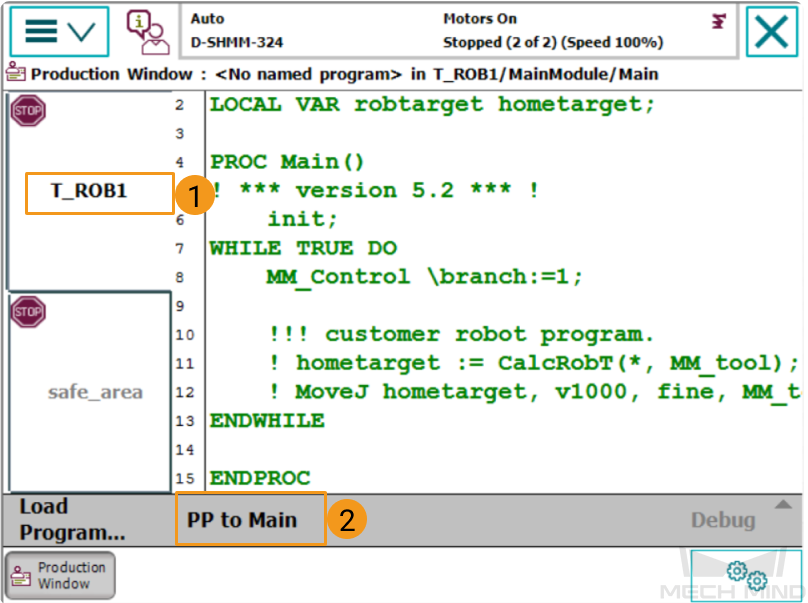
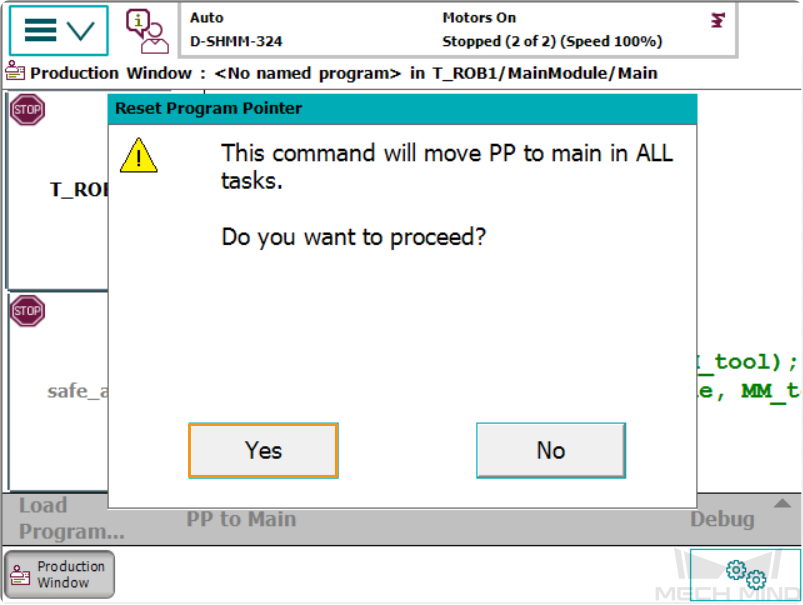
Move the PP of task T_ROB1 to Main. After selecting PP to Main, if a window as shown below pops up, please tap Yes to confirm.