mm_viz_pick_and_place
The program triggers the Mech-Viz project to run to obtain the planned path for picking and placing the object.

Configurations
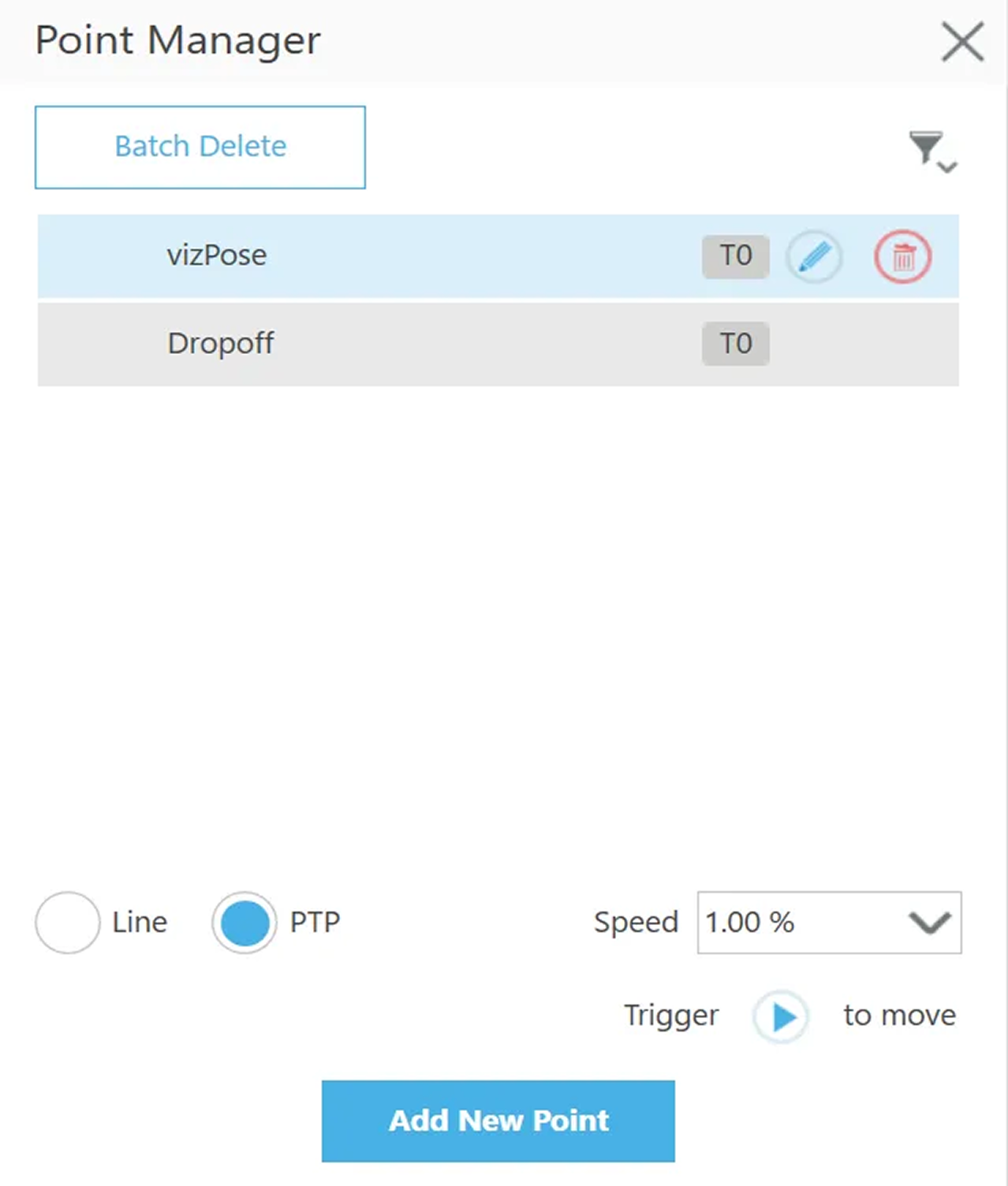
Point Configurations
The program involves a total of 2 points, as detailed below.
-
vizPose: The point assigned based on the planned path returned by Mech-Viz. You do not need to teach the point in advance.
-
Dropoff: The point where the robot places the object. You need to teach the point in advance.
Attribute Configurations
MM init Component
All network devices in the program are generated by using MM init. This component allows you to modify the IP address and port number of the IPC.
Run Viz Component
You needs to manually specify the parameter values of the Run Viz component. For detailed instructions, see Modify Component Parameters.
Program Description
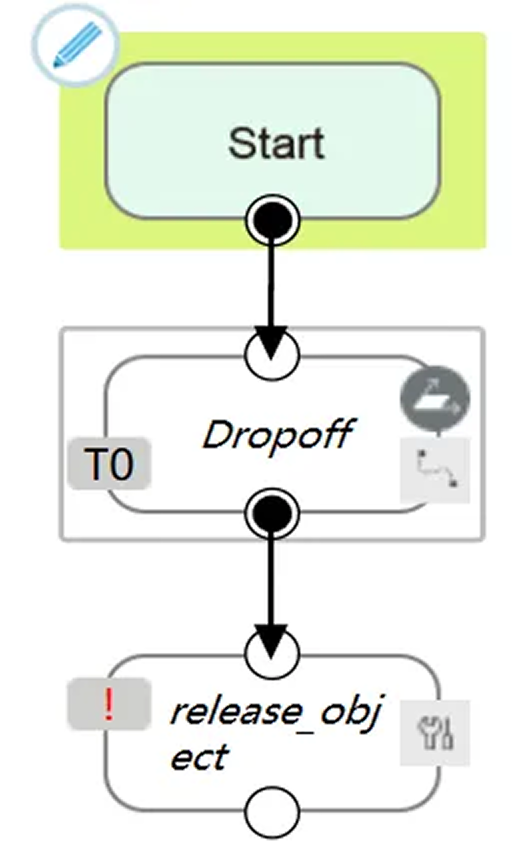
Place (place_sequence)
The release_object node cannot be executed directly. You can modify the parameter values here to control the tool to release.
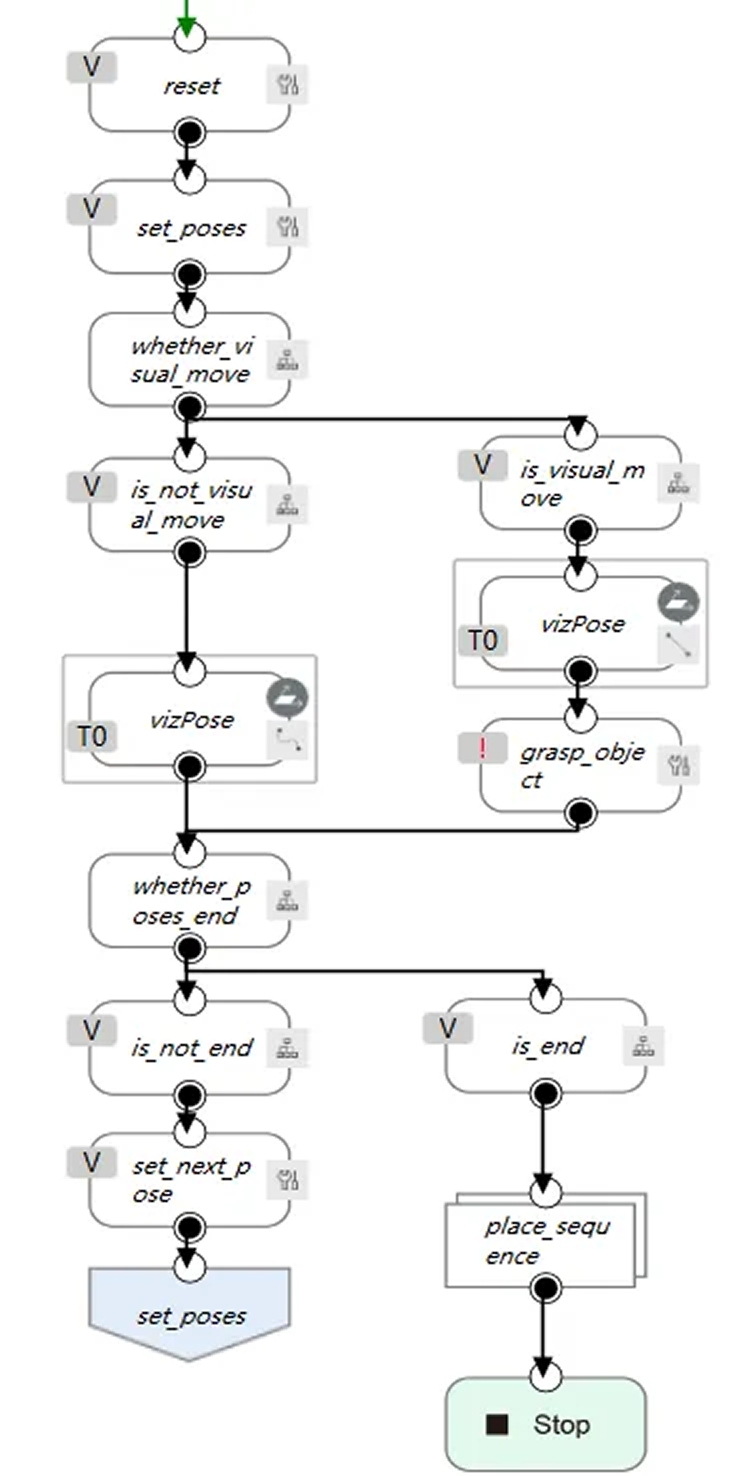
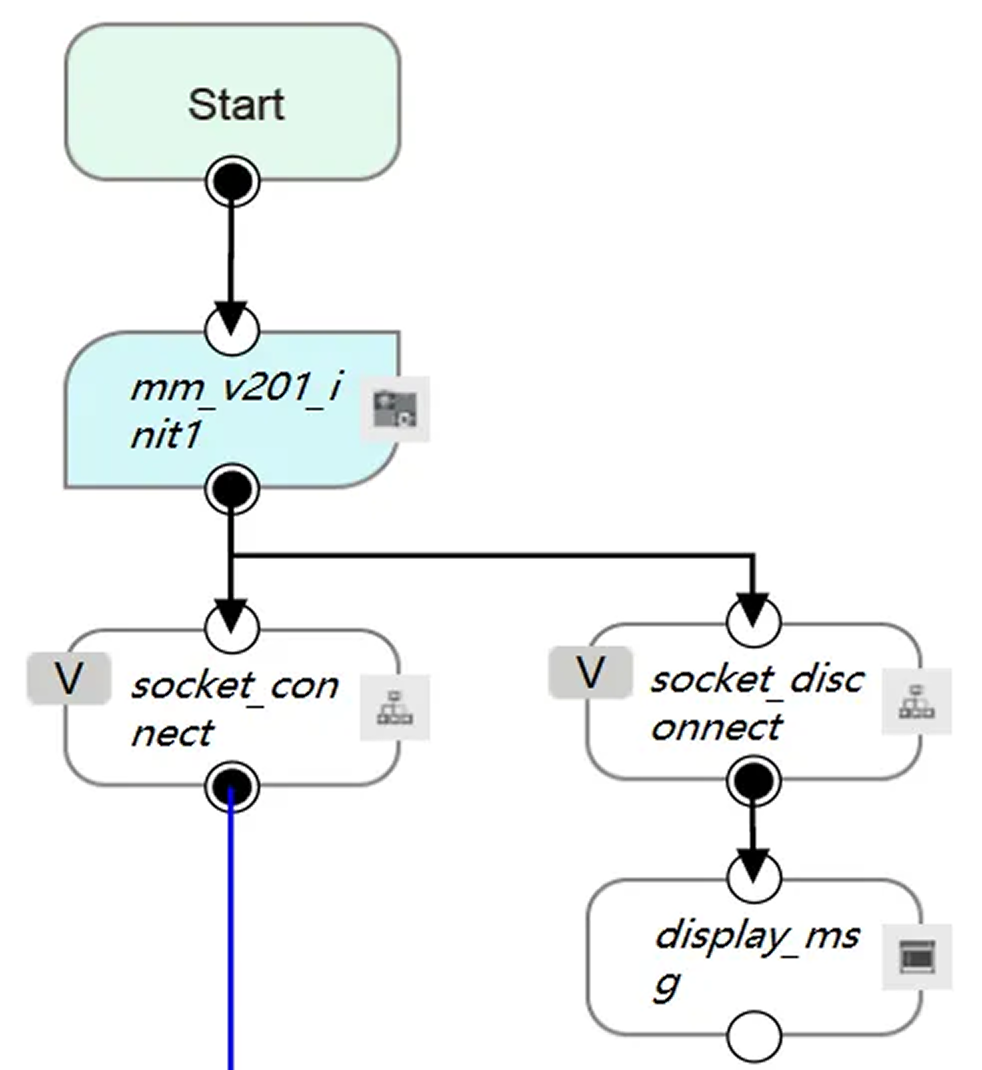
Main Program (mm_v201_viz_pick_and_place)
-
First, set up the communication between the robot and the vision system by using mm_v201_init1. You can modify the IP address and port number of the IPC in mm_v201_init1.
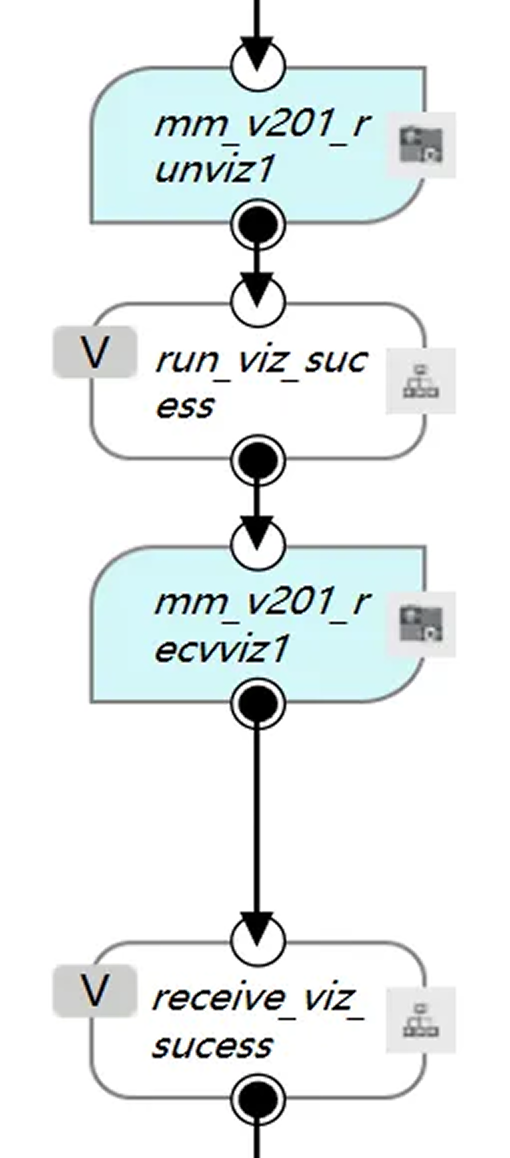
-
Run the Mech-Viz project and set the exit port of the Branch by Msg Step and the Current Index value by using mm_v201_runvis1.
-
Obtain the motion path obtained by the Mech-Viz project by using mm_v201_recvviz1. The planned path received from Mech-Viz is stored in the global variable g_mm_socket_recv_array as strings.
-
Assign the pose of the waypoint that is stored in g_mm_socket_recv_array to vizPose and determine whether the waypoint is a Vision Move waypoint (the waypoint that corresponds to the Vision Move Step and is used as the picking waypoint). If the waypoint is not a Vision Move waypoint, the robot move to the waypoint in the form of joint motion. If the waypoint is not a Vision Move waypoint, the robot move to the waypoint in a straight line and then pick the target object. The grasp_object node cannot be executed directly. You can modify the parameter values here to control the tool to grasp.
-
Check whether all waypoints have been reached. If they have, proceed to the sub-process of placing the target object.