How Can the Standard Interface Programs for Kawasaki Robots be Run in the Background?
For Kawasaki robots, a Standard Interface program can contain a primary program and a secondary program. When the primary program calls the secondary program, the primary program is considered a foreground program, while the secondary program is considered as a background program that needs to automatically run after the robot system starts. This guide mainly describes how to create a Standard Interface background program for a Kawasaki robot and allows the program to run in the background.
| Before you begin, please ensure that Kawasaki Standard Interface communication is set up. |
-
Create a text file named loadme on your computer, change the file extension to as, and then use Notepad to open the file.
-
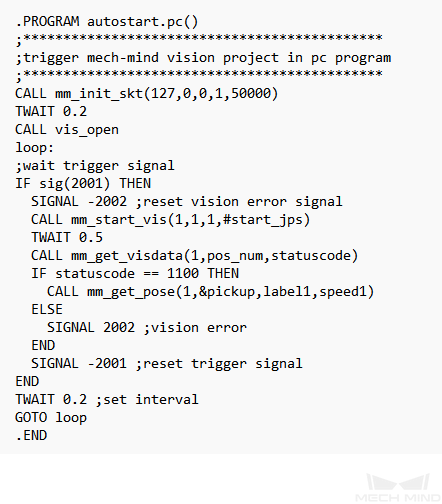
In the loadme.as file, enter the autostart.pc background program code, as shown in the following figure. This program indicates that if the internal signal 2001 is detected, the program will trigger the Mech-Vision project to run and obtain the vision result.
-
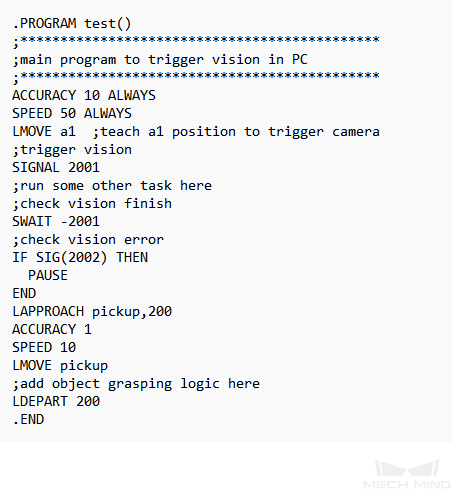
In the loadme.as file, enter the test foreground program code, as shown in the following figure. This program indicates that the 2001 signal is triggered at the camera’s image-taking position. If the vision result is successfully obtained, the robot will move to the vision point for picking.
-
Load the loadme.as file to the robot. For more information, see Set up Standard Interface Communication with Kawasaki.
-
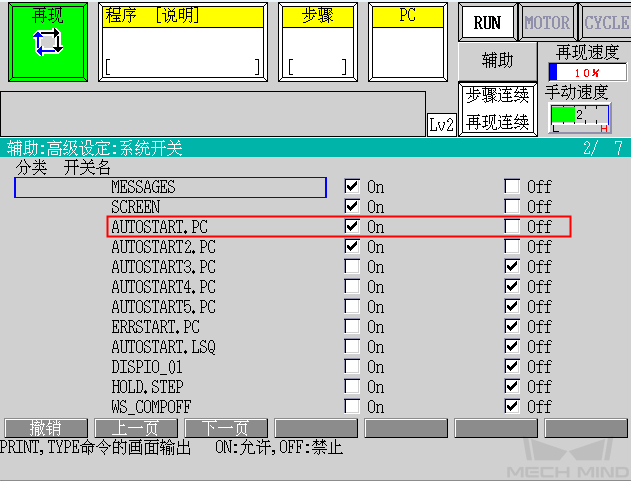
Select , set AUTOSTART.PC to ON to allow AUTOSTART.PC to be automatically started when the robot starts, and then press the log in button to confirm.
-
In the program selection window, select the foreground program test.
-
Restart the controller to run the background program.
-
For information about how to run the foreground program test, see Run Calibration Program.