How to Troubleshoot Failed Standard Interface Communications?
If the Standard Interface communication cannot be established between the Mech-Mind Vision System and the robot, the following reasons may be responsible. You can check the configuration items based on the sequence of this guide.
1. Controller System
1.1. Check if the Required Control Modules are Installed
Problem
Some control modules required for the robot brand are not installed, which causes the communication to fail.
Solution
Make sure that the control modules are installed on the robot system based on the communication setup instructions of the robot brand.
1.2. Robot or Controller Version Is Incompatible with the Vision System Version
Problem
Robot producers upgrade robot controllers constantly. Your controller version and the controller version supported by the Mech-Mind Vision System may not be the same. In such cases, if you load Standard Interface programs to your robot, issues such as program code incompatibilities may occur. Therefore, you need to check if you want to proceed with the Standard Interface communication.
Solution
-
If your controller model and the supported controller model are inconsistent, your controller model is very likely not supported by the Mech-Mind Vision System for Standard Interface communication.
-
If the controller model matches the supported controller model but the version numbers differ, the on-site engineer can attempt to proceed with the communication according to the provided documentation. However, in such cases, Mech-Mind does not guarantee that the Standard Interface communication you set up can work normally. If you have any questions, please contact Mech-Mind technical support.
2. Networks
2.1. Specified Robot IP Port and the Used Port Are Inconsistent
Problem
Some robot brands may provide two Ethernet ports such as port 1 and port 2 on their CPU motherboard. The Ethernet cable is plugged into port 1, but an IP address that matches port 2 is specified.
Solution
Open the controller and ensure that the port into which the Ethernet cable is plugged matches the specified IP address.
2.2. Specified IPC IP Port and the Used Port Are Inconsistent
Problem
Some IPC brands may provide two Ethernet ports such as port 1 and port 2 on their CPU motherboard. The Ethernet cable is plugged into port 1, but an IP address that matches port 2 is specified.
Solution
Repeatedly plug and unplug the IPC’s Ethernet cable while observing the network adapter panel to monitor the connection status. This way, the correspondence between ports and IP addresses can be determined.
2.3. Improper Firewall Settings of IPC
Problem
The firewall of the IPC determines that the connection between the vision system and the robot is malicious and then closes the connection.
Solution
Disable all firewall settings or configure proper firewall rules. For more information, see How to Troubleshooting Failed Communications Caused by Firewalls?
2.4. Improper Router Settings
Problem
When the settings of the router are improper, the communication cannot be established.
Solution
Disable the router and then test the direct communication between the vision system and the robot. If the direct communication between the vision system and the robot can be established, test the communication of the two sides using a router. If the communication of the two sides using a router fails, see the router manual to check the router settings.
2.5. IPC and Robot IP Addresses Are Not in Same Subnet
Problem
The IP address or subnet mask settings of the IPC or the robot are improper, causing them to be on different subnets and preventing communication.
Solution
Check the IP address and subnet mask settings of the IPC and the robot to make sure that the two IP addresses reside in the same subnet, and then test whether the communication can be established by using the two IP addresses. If the communication can be established, the two IP addresses are valid.
2.6. Robot Communication Configuration Error
Problem
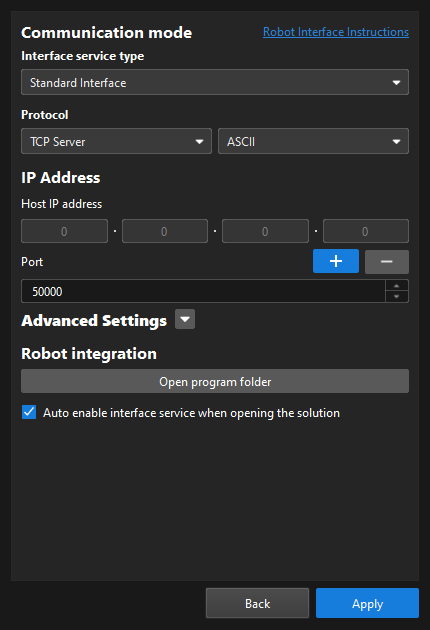
The communication cannot be established because the robot communication was improperly configured.
![][align="center"](_images/faq12_1.png)
Solution
Make sure that the specified protocol, IP address, and port number are correct. For more information, see How to Configure IP Address and Port Number?
2.7. Standard Interface Service Not Enabled
Problem
The robot communication configuration (i.e. the standard interface service) is not enabled in the toolbar of Mech-Vision. As a result, the communication cannot be established.

Solution
Make sure that the switch shown in the above figure is turned on.
3. Standard Interface Programs
3.1. Other Foreground or Background Programs Are Running When the Program Files Are Being Loaded
Problem
When a Standard Interface program file is being loaded to a robot that contains the same program, the loading will fail because the same program is being used.
Solution
On the teach pendant interface, disable the foreground or background program for the robot.
3.2. Incorrect Standard Interface Program Files Are Loaded
Problem
When the incorrect Standard Interface program file is loaded, the communication will fail.
Solution
On the teach pendant interface, make sure that the correct Standard Interface program file is loaded to the robot system.
3.3. Incorrect IPC IP Address and Port Number in Standard Interface Program File
Problem
After you loaded the Standard Interface program, you did not change the IP address and port number in the program file or you specified incorrect IP address and port number.
Solution
On the teach pendant, make sure that the IP address in the Standard Interface program file is the actual IPC IP address and the port number in the file is the port number set in the communication configuration of Mech-Vision.