How to Configure IP Address and Port Number in Robot Communication Configuration?
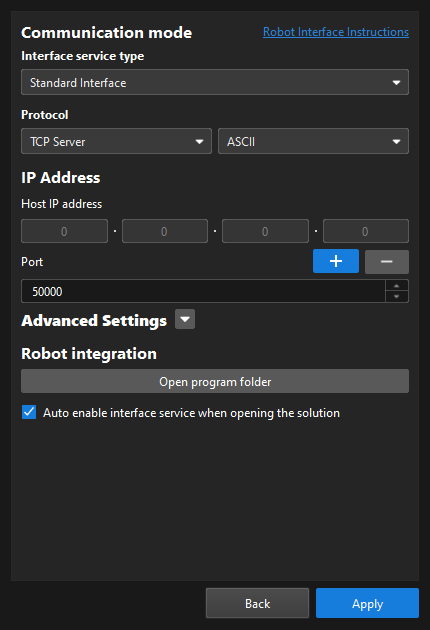
Many users are unfamiliar with the IP addresses and ports in robot communication configuration and are unsure which device’s IP address to enter or which port to use. These settings are shown in the figure below. This guide describes the IP addresses and ports in robot communication configuration. The following table describes the details.
| Protocol | Vision system role | IP address | Port |
|---|---|---|---|
TCP Server |
Server |
0.0.0.0 |
A custom number used to connect to external devices like robots or PLCs. The Standard Interface program on the external device requires the IP address of the IPC in which the vision system is installed and the port number set here. |
Siemens PLC Client |
Client |
IP address of the PLC |
None |
ETHERNET IP |
Server |
None |
None |
MODBUS TCP Slave |
Server |
0.0.0.0 |
A custom number used to connect to external devices like robots or PLCs. The Standard Interface program on the external device requires the IP address of the IPC in which the vision system is installed and the port number set here. |
UDP Server |
No need to use a role |
0.0.0.0 |
A custom number used to connect to external devices like robots or PLCs. The Standard Interface program on the external device requires the IP address of the IPC in which the vision system is installed and the port number set here. |
Mitsubishi MC Client |
Client |
IP address of the PLC |
Port of the PLC |