対象物検出
コマンド機能
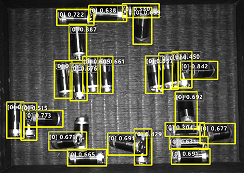
対象物検出モデルパッケージを使用して入力画像に対して推論を行い、すべての対象物の位置を検出するとともに、そのクラスを判定して出力できます。
ワーク個数のカウント、ワーク領域の検出および抽出などのシーンに適しています。
入力と出力
ディープラーニングモデルパッケージを推論 ステップでこのモデルパッケージをインポートすると、以下の入力・出力ポートが表示されます。
入力
| 入力ポート | データ型 | 説明 |
|---|---|---|
画像 |
Image/Color |
このポートに入力された画像がディープラーニングデルパッケージ推論に使用されます。入力データタイプ が 2D画像 の場合に、このポートが表示されます。 |
サーフェスデータ |
Surface |
このポートに入力されたサーフェスデータがディープラーニングデルパッケージ推論に使用されます。入力データタイプ が サーフェスデータ の場合に、このポートが表示されます。 |
出力
| 出力ポート | データ型 | 説明 |
|---|---|---|
可視化出力 |
Image/Color |
可視化された結果。 |
対象物の境界ボックス |
Shape2D/Contour[] |
検出結果の境界ボックス。入力データタイプ が 2D画像 の場合に、このポートが表示されます。 |
対象物の画像 |
Image/Color |
検出結果の境界ボックスを用いて、入力画像から切り出した画像。 |
対象物の信頼度 |
Number[] |
検出結果の信頼度。 |
対象物のラベル |
String[] |
検出結果のラベル。 |
対象物の境界ボックスのマスク |
Image/Color/Mask[] |
対象物の境界ボックスに対応する長方形マスク。非ゼロピクセル値の領域がマスクです。入力データタイプ が 2D画像 の場合に、このポートが表示されます。 |
境界ボックス内のサーフェスデータ |
Surface[] |
対象境界ボックスの長方形表面データ。入力データタイプ が サーフェスデータ の場合に、このポートが表示されます。 |
パラメータ説明
対象物検出のモデルパッケージをインポートする場合、以下のパラメータを設定する必要があります。
モデルパッケージ設定
| パラメータ | 説明 |
|---|---|
モデルパッケージ管理ツール |
パラメータ説明:ディープラーニングモデルパッケージ管理ツールを開き、ディープラーニングモデルパッケージをインポートするために使用されます。モデルパッケージファイルとは、Mech-DLKによってエクスポートされた「.dlkpack」を指します。
|
モデルパッケージ名 |
パラメータ説明:このパラメータは、ディープラーニングモデルパッケージをインポートした後、インポートしたモデルパッケージを選択するために使用されます。
|
モデルパッケージ切替後に元のモデルを解放 |
パラメータ説明:モデルを切り替える際に、元のモデルパッケージが使用していたリソースを即時に解放するかどうかを制御します。
|
モデルパッケージのタイプ |
パラメータ説明: モデルパッケージ名 を選択すると、モデルパッケージのタイプ が自動的に記入されます。 |
入力画像バッチサイズ |
パラメータ説明:各推論時に処理する画像の枚数です。 |
GPU ID |
パラメータ説明:このパラメータは、モデルパッケージ推論に使用するGPUのデバイスIDを設定するために使用されます。
|
入力データタイプ |
パラメータ説明: 入力データの種類を指定します。選択後、対応する入力ポートが表示されます。2D画像またはサーフェスデータ入力をサポートします。 |
前処理
| パラメータ | 説明 | ||||
|---|---|---|---|---|---|
ROIファイル |
パラメータ説明:入力画像のROIを設定または変更します。 調整説明:初期状態ではデフォルトROI設定が存在します。ROIを変更するには、エディタを開く をクリックします。設定画面が表示されるので、ROIを設定し、ROI名を入力します。 ROI設定方法:画像表示エリアで左クリックし、ドラッグしてROIを選択します。再度左クリックすると、ROI選択が完了します。ROIを再設定する場合は、再び左クリックして選択し直します。選択したROI座標範囲がROIのパラメータで表示されます。確認 をクリックすると、設定が保存され、設定画面が閉じます。
|
後処理
| パラメータ | 説明 |
|---|---|
推論設定 |
パラメータ説明:このパラメータは、対象物検出のモデルパッケージ推論に関するパラメータを設定するために使用されます。推論設定ツールを開くには、エディタを開く をクリックします。
|
クラス表示モード |
パラメータ説明:出力結果において、クラスを名前またはインデックスで表示するかを選択します。 |