データ処理
ビードを水平に調整
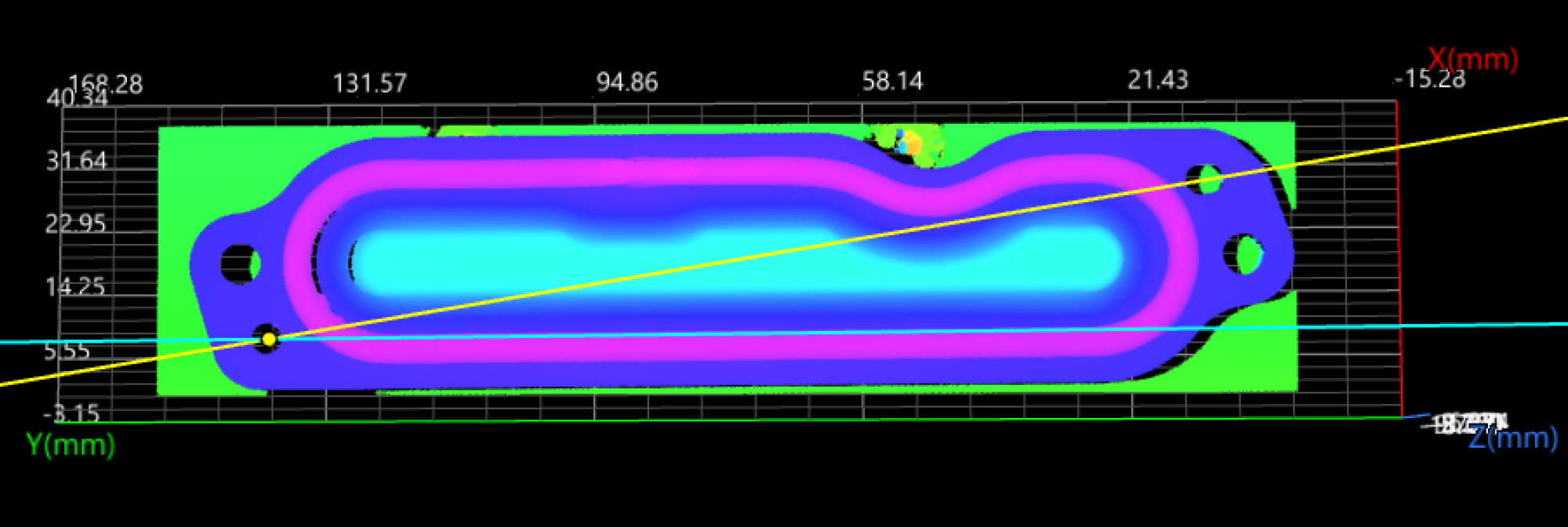
ビードの高さ、幅、断面積などを測定します。画像にビード平面が傾斜した場合、対象データを精確に指定できず、深度データ( Z 値)をデータフィルタリングに使用することができないことがあります。後続の手順で正確に測定できるように、ビードの平面を水平に調整します( XOY に平行する)。サーフェス変換 ステップを実行してデータの座標系を変換し、ビードの平面を水平に調整することができます。
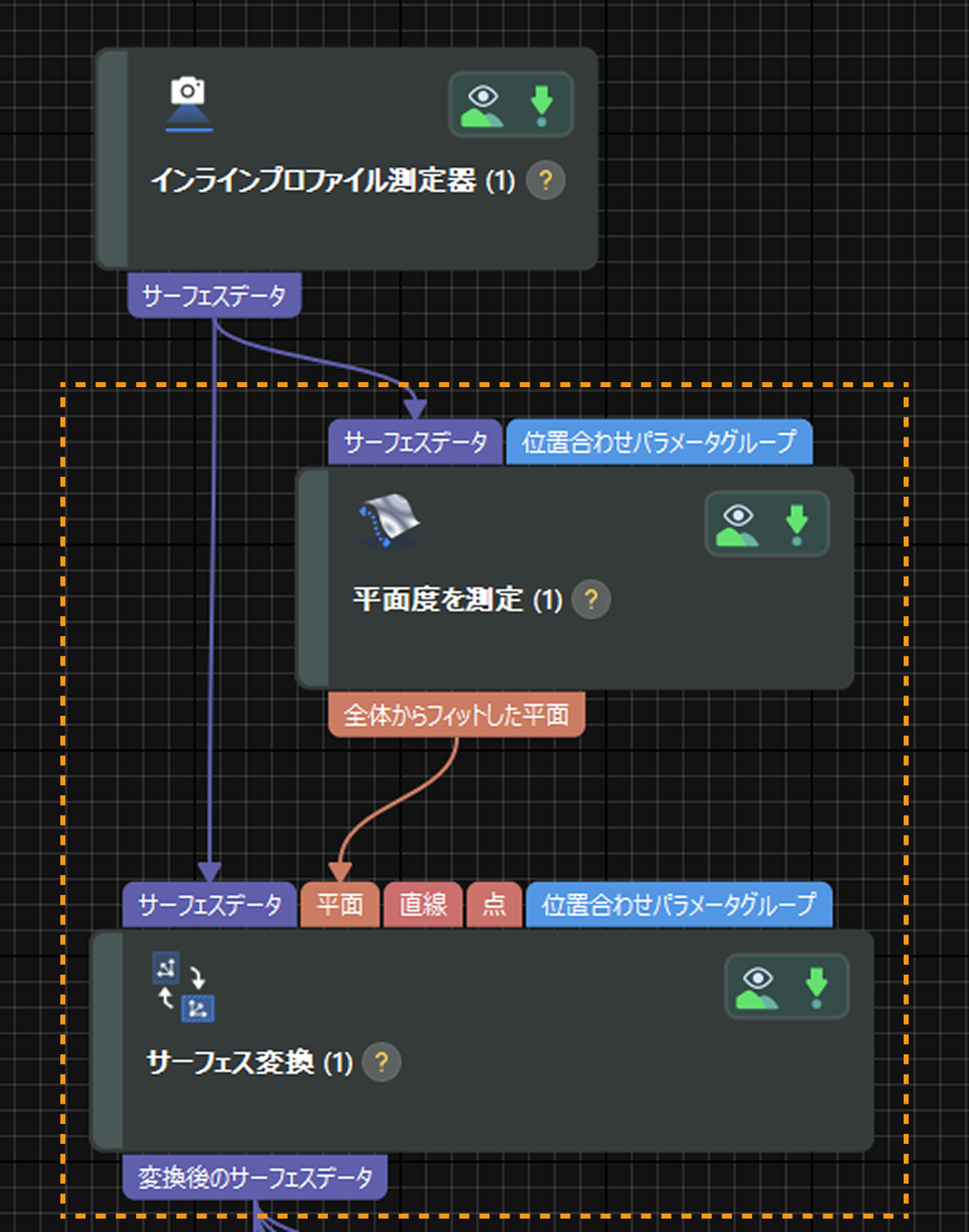
塗布する面が平面なのでビード周辺の面を水平に調整すればいいです。平面だけ入力 に設定し、サーフェス変換 ステップを実行してサーフェスデータを新しい座標系に変換できます。
詳細な手順は以下の通りです。
-
平面の特徴を抽出:平面度を測定 ステップを実行して平面の特徴を取得して、新しい座標系の XOY 平面とします。
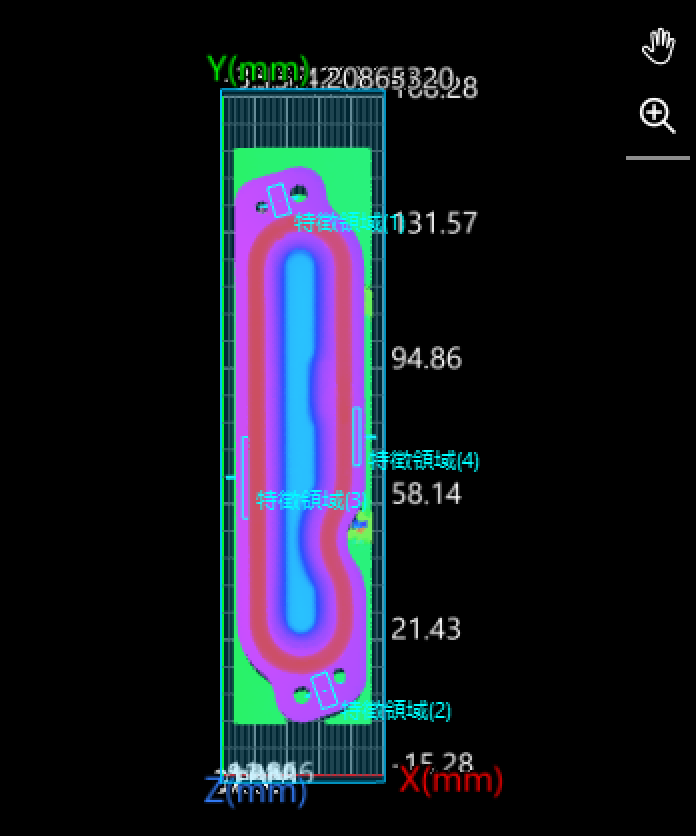
このステップを選択し、データビューアで特徴領域を調整してビーズ周辺の平面データを指定してフィッティングを実行できます。
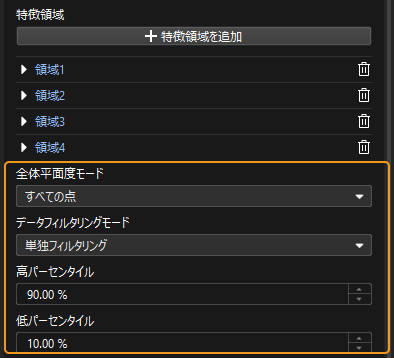
その後、パラメータ設定エリアで平面フィッティングとフィルタリングのパラメータを下図のように設定します。
-
座標系変換:フィットした表面を サーフェス変換 ステップに入力し、実行してサーフェスデータの座標系変換を行います。これでビードが水平面に調整されました。新しい座標系の X 軸が元の座標系の X 軸に平行し、原点は、元座標系原点が新しい XOY 平面に投影したものになります。
-
結果出力 パネルで
 または
または  をクリックしてデータの可視化を設定できます。データビューアでは設定内容によってデータを表示します。
をクリックしてデータの可視化を設定できます。データビューアでは設定内容によってデータを表示します。
- デバッグ経験
-
-
サーフェスを平面にフィット ステップも 平面度を測定 ステップも迅速に平面をフィッティングしますが、後者がノイズを除去できるのでより正確な平面をフィットします。
-
サーフェス変換 ステップの実行速度は、Mech-Eye Viewer に設定した プロファイル数 によって変わります。プロファイル数が多い場合に、このステップにおける画像処理に時間がかかり、全体的なタクトに影響する可能性があります。
-
-
データの位置合わせ
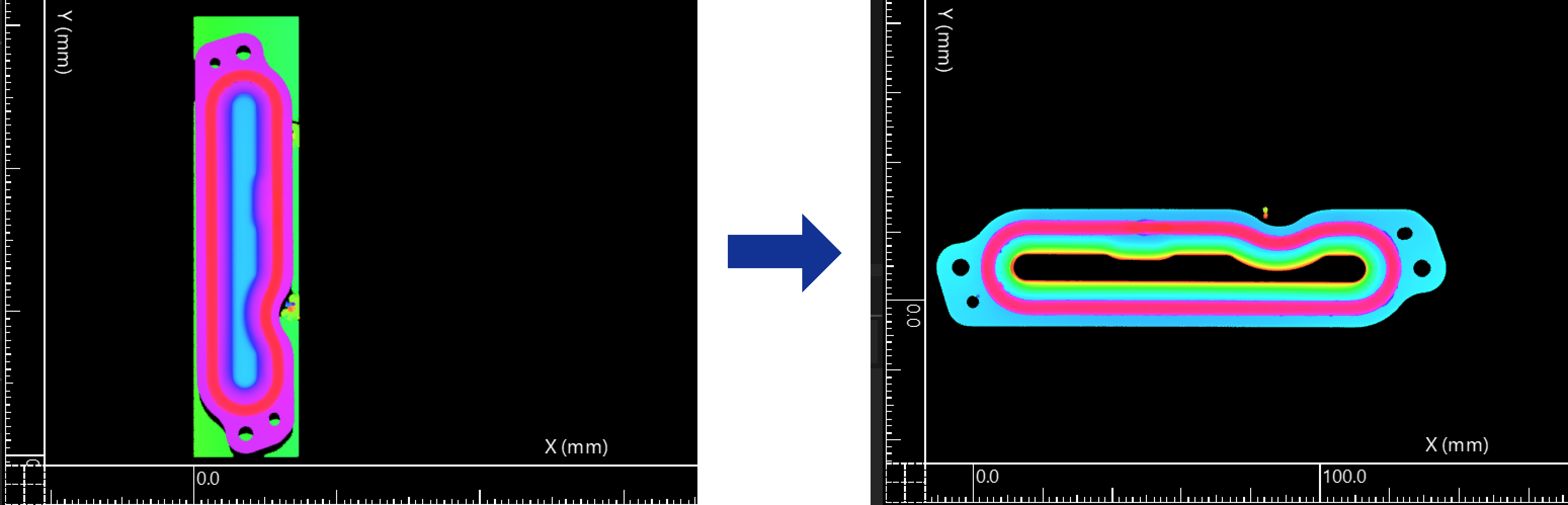
ワークを複数回スキャンして結像した時、画像データにワーク位置のばらつきが発生します。これによる影響を低減するため、画像にある共通の特徴を抽出して位置合わせします。こうすると、後続の測定の一貫性を確保できます。上記のサーフェスデータを変換後、もう1つの サーフェス変換 ステップを実行してデータの位置合わせを実現できます。

平面、直線および点を入力 した座標系変換方式では、ワークを固定位置に正確に変換できます。従って、平面、直線、点 の特徴がそれぞれ抽出されます。
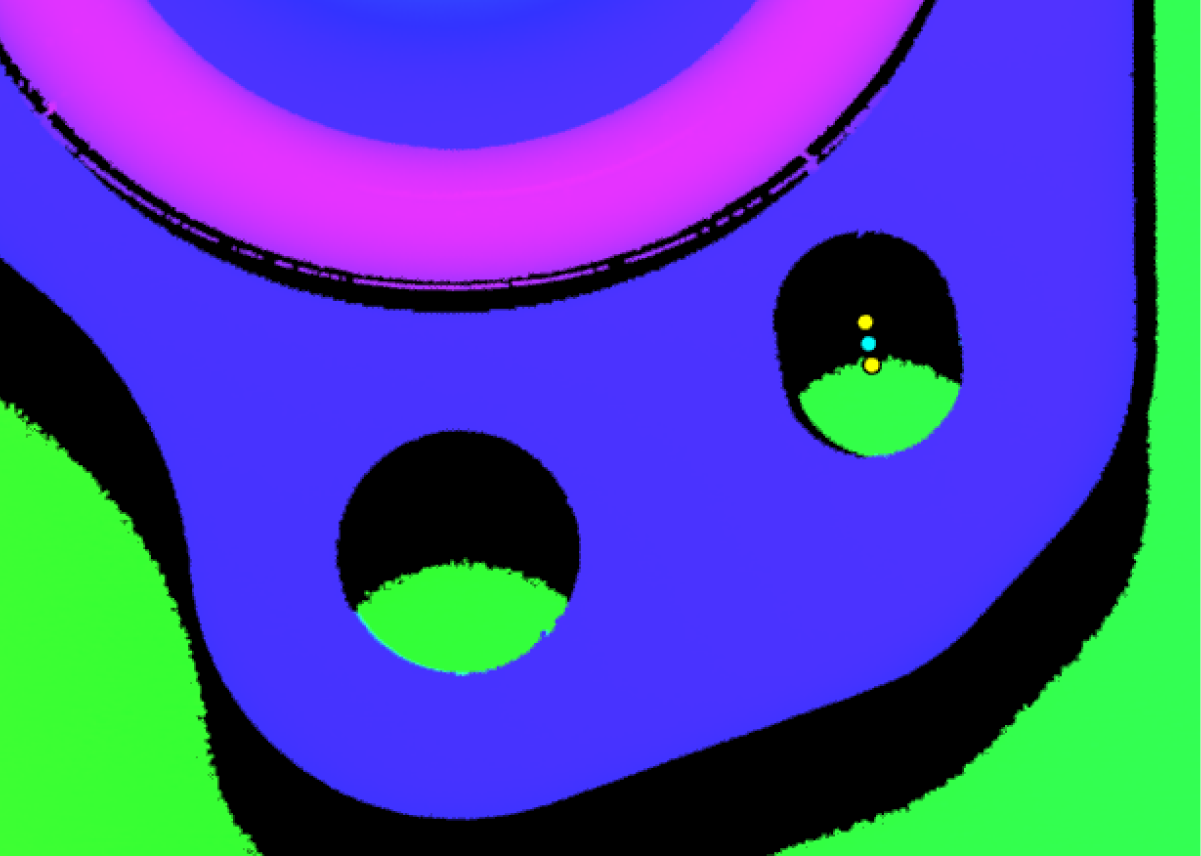
現場のニーズに応じて、座標系を変換した後、画像にあるワークの位置は以下のようです。
-
ビード周辺の平面が XOY 平面にある
-
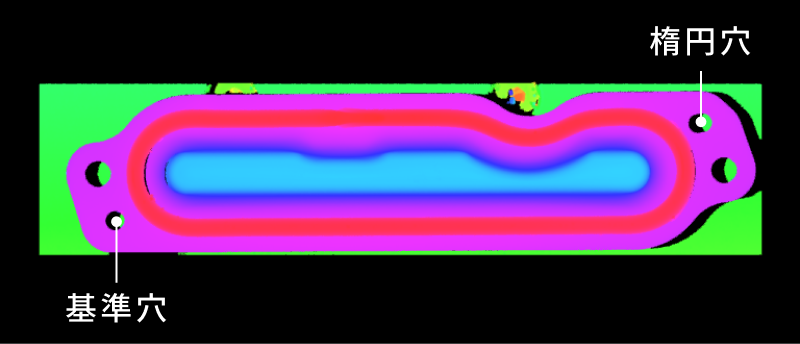
基準穴の円心が原点に位置する
-
基準穴の円心と楕円穴中心点を繋ぐ線を、基準穴の円心を中心に時計回り 9°回転させると新しい座標系の X 軸と重なり合う
次に、サーフェス変換に必要な幾何学的特徴を取得します。
-
平面点群を抽出
特徴から平面を作成 ステップを実行してサーフェス特徴を取得することができます。ビードを水平に調整 した後、ビード周辺の平面が XOY 平面になります。そのため、XOY 平面をそのままにしても構いません。
以下のようにステップのパラメータを設定します。
-
平面タイプ を 固定平面 に設定します。
-
平面の 法線ベクトルZ を 1(またはその他の数値)に設定し、その他のパラメータを 0 のままにします。
-
ステップの 出力欄 で、作成された平面 にチェックを入れます。
ステップを実行すると、作成された平面が出力されます。この平面は、元座標系の XOY 平面と重なり合います。
-
-
点の特徴を抽出
サーフェスのエッジを円にフィット ステップを実行し、基準穴のデータによって円をフィットして、さらに円心を取得します。
以下のようにステップのパラメータを設定します。
-
特徴領域を使用 にチェックを入れ、基準穴のデータを指定して円の経路の寸法・位置を確認します。
-
キャリパーに関連する設定を行います。エッジポイントが円形エッジ全体に均等に分布するように、角度範囲、キャリパーの数、キャリパーの長さ、キャリパーの幅 などのパラメータを適切に設定します。
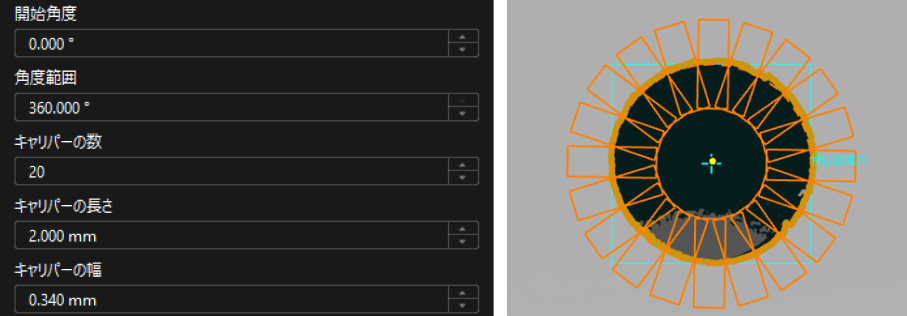
-
無効点の深度補完値 を -2.700 に設定します。エッジの平面とは明らかに異なる値を設定します。これによって理想的なエッジ ポイントを検出しやすくなります。
-
ステップタイプ のクリックメニューから 最後 を選択し、絶対しきい値 を 1.000 に設定します。これで目標エッジポイントを確実に取得できます。
-
ステップの 出力欄 で、円心 にチェックを入れます。
ステップを実行すると、この穴の円心が出力されます。この円心は、新しい座標系の原点として使用できます。
-
-
直線の特徴を抽出
基準穴の円心と楕円穴中心点を繋ぐ線を、基準穴の円心を中心に時計回り 9°回転させると新しい座標系の X 軸と重なり合います。この二点を繋ぐために楕円穴の中心点を確認します。
楕円穴の中心点を確認する方法:2つの サーフェスのエッジを円にフィット ステップを実行してそれぞれ楕円穴の2つの半円をフィットし、2つの円心を取得します。特徴から点を作成 ステップを実行して2つの円心の中心点を取得します。それが楕円穴の中心点となります。
詳細な手順は以下の通りです。
-
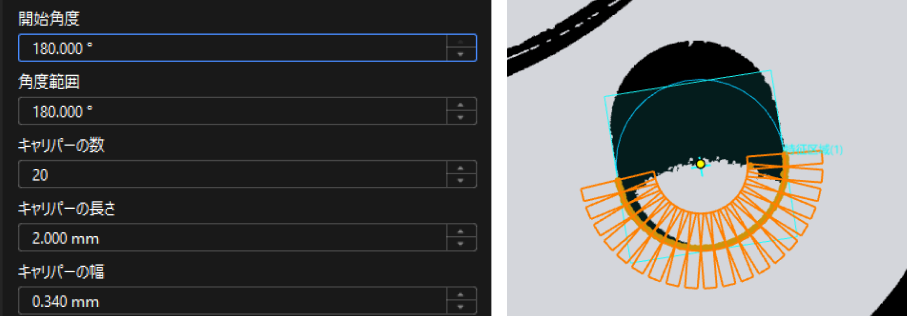
2つの サーフェスのエッジを円にフィット ステップを実行してそれぞれ2つの半円をフィットします。
-
特徴領域を使用 にチェックを入れ、半円のデータを指定して円の経路の寸法・位置を確認します。領域1 を展開します。特徴領域の 回転角度 を 9°に設定します。
-
キャリパーに関連する設定を行います。エッジポイントが円形エッジ全体に均等に分布するように、角度範囲、キャリパーの数、キャリパーの長さ、キャリパーの幅 などのパラメータを適切に設定します。
-
無効点の深度補完値 を -2.700 に設定します。エッジの平面とは明らかに異なる値を設定します。これによって理想的なエッジ ポイントを検出しやすくなります。
-
上の半円に対し、ステップタイプ のクリックメニューから 最初 を選択し、絶対しきい値 を 1.000 に設定します。下の半円に対しては初期値を試用すればいいです。
-
ステップの 出力欄 で、円心 にチェックを入れます。
2つのステップを実行すると、半円の円心がそれぞれ出力されます。
-
-
2つの円心を 特徴から点を作成 ステップに入力します。ステップのパラメータパネルで、点タイプ を 2点間の中点 に設定して楕円穴の中心点を取得します。
-
特徴から直線を作成 ステップを実行して基準穴の円心と楕円穴の中心点を繋ぎます。
-
取得した直線と基準穴の円心をもう1つの 特徴から直線を作成 ステップの入力します。パラメータを設定し、基準穴の円心を中心に、その直線を時計回り 9°回転させます。
以下のようにステップのパラメータを設定します。
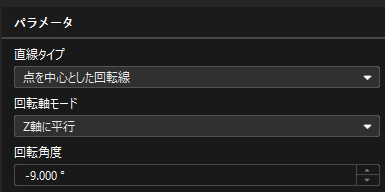
-
ステップの 出力欄 で、作成された直線 にチェックを入れます。
ステップを実行すると、回転された直線が出力されます。この直線は、新しい座標系の X 軸と重なり合います。
-
-
データの位置合わせ
抽出した平面と点、直線の特徴を サーフェス変換 ステップに入力します。以下のようにステップのパラメータを設定します。
-
特徴領域を使用 にチェックを入れ、ビードとその周辺の平面データを指定してデータ範囲を絞り込みます。
-
解像度モード のクリックメニューから 元の値を保持 を選択します。
ステップを実行すると、変換後のサーフェスデータが出力されます。これで画像データの位置合わせが完了しました。
-
データフィルタリング
サーフェス点のフィルタリング(法線ベクトルによる)ステップを実行して位置合わせ済みのデータをフィルタリングしてノイズを除去します。
-
パラメータ設定:ステップのパラメータパネルで 法線ベクトルの最大角度 を 80° に設定し、その他のパラメータを初期値のままにします。
ステップを実行すると、フィルタリングされたサーフェスデータが出力されます。
続いて、処理後のデータを使用して経路の測定・検査を行います。