3D測定・検査ソリューションの設計
現場に導入する前に、プロジェクトのニーズに合わせて3D測定・検査ソリューションを設計します。3Dインラインプロファイル測定器とIPCの型番を選択し、インラインプロファイル測定器の取り付け方式、およびロボットの通信方法などを確定する必要があります。
ソリューションを設計する際に、以下の手順を完了します。
インラインプロファイル測定器の選択
インラインプロファイル測定器の型式の比較 にアクセスしてインラインプロファイル測定器の異なる型式の特徴と適用シーンなどを把握した上で実際のニーズに合わせて測定器を選択してください。
以下の内容を参考にしてください。
-
測定対象物の寸法(長さ、幅、高さ)に合わせてインラインプロファイル測定器の型式を確認します。
選択の基準:測定器のX軸測定範囲は対象物の長さまたは幅より大きい必要があります。ほとんどの場合、測定器の長辺は対象物の長辺と平行になるので、X軸測定範囲は測定対象物の幅より広ければいいです。また、測定器のZ軸測定範囲は測定対象物の高さより大きくなければなりません。
複数の型式が要件を満たす場合は、測定範囲が狭い型式を選択することを推奨します。
ほとんどの場合、測定器の長辺は対象物の長辺と平行になるので、X軸測定範囲は測定対象物の幅より広ければいいです。2つ以上のワークを組合わせて測定する場合に、X軸測定範囲はワーク組合せの長さまたは幅より大きい必要があります。 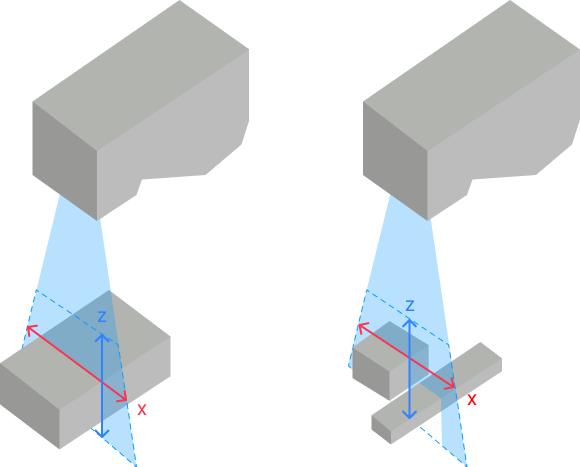
-
キャリブレーション精度がプロジェクト要件を満たしていることを確認します。
インラインプロファイル測定器のX軸解像度と Y軸解像度 の精度がプロジェクト精度の要件を満たしていることを確認します。
解像度はインラインプロファイル測定器が測定可能な最小寸法や最小変化量を反映します。通常、測定器の解像度が高いほど、精度は高くなります。
深度画像の場合、5 × 5~10 × 10ピクセル以上の測定領域が必要です。それに基づいて測定器のX、Y軸解像度要件を計算します。例えば、1mm × 1mmの測定領域を10 × 10ピクセルで表現する場合、各ピクセルは0.1mm × 0.1mmの領域に対応することになるので、測定器によって出力された深度画像のX、Y軸解像度は0.1mm以下でなければなりません。 -
インラインプロファイル測定器のスキャン速度がタクト要件を満たしているかを確認します。
プロジェクトのスキャン速度は以下のように計算します。
スキャン速度=スキャン長さ/許容スキャン時間/Y軸解像度
例えば、スキャン長さが160mmで、スキャン時間が2s、Y軸解像度が0.0235mmの場合、プロジェクトに必要なスキャン速度は3.405kHzになります。
上記のスキャン速度はインラインプロファイル測定器の画像取得速度です。現場では、測定プロジェクトの処理時間や信号/データ伝送の時間も考慮に入れて計算します。
IPC型番の選択
3D測定・検査ソリューションに、Mech-Mind IPC STD と Mech-Mind IPC ADV を推奨します。IPCの技術仕様と実際のニーズに応じて選択してください。
| 技術仕様 | Mech-Mind IPC STD | Mech-Mind IPC ADV |
|---|---|---|
同時に実行可能なMech-MSRプロジェクト数 |
≤3 |
≤5 |
同時に接続可能な測定器の数 |
≤3 |
≤5 |
| ワークの画像または点群データサイズが大きくて(例えば20000行もスキャンする)かつ表面の特徴も多いなど、同一プロジェクト内で複数の「ブロブ解析」と「サーフェスの前処理」ステップを使用する場合には高性能なIPCが必要になります。この場合、効率的にプロジェクトを実行するために、Mech-Mind IPC PRO の使用を推奨します。 |
Mech-MSRソフトウェア使用時に可視化表示やデバッグ(デバッグ結果出力 が有効中)を行う場合、より良い使用体験のために、実際のプロジェクトで処理する画像や点群データサイズに応じて、適切なIPCを選択してください。
-
点数が 1.0×107 以下の場合:Mech-Mind IPC STD シリーズで一般的な要求を満たせます。
-
点数が 1.0~8.0×107 の間の場合:Mech-Mind IPC ADV シリーズで、より快適な使用体験が得られます。
| 画像や点群の点数が選択したIPCの処理能力範囲を超えていない場合でも、デバッグ結果出力 を有効にするとシステムリソースの占有が高まり、Mech-MSRソフトウェアがカクつく可能性があります。深刻なカクつきが発生した場合は、ダウンサンプリング の程度を上げることをお勧めします。 |
Mech-Mindでは、自身で用意したデバイス(PCまたはノートパソコン)をIPC(以下「自分のIPC」)として使用し、Mech-Mindソフトウェアをインストールおよび実行することを許可しています。自分のIPCを使用する場合、Mech-Mindは自分のIPCが標準IPCと同等の機能と性能を提供できることを保証していません。また、Mech-MSRシステム要件 を満たしているIPCを使用してください。
インラインプロファイル測定器の取付方法の確認
測定器がデータ取得時にセンサーヘッドがワークとともに移動します。以下のように設置できます。
-
センサーヘッドを固定し、ワークが移動する:センサーヘッドをしっかりとブラケットに取り付けます。
-
ワークを固定し、センサーヘッドが移動する:センサーヘッドをしっかりと移動装置のブラケットに取り付けます。
| 連続キャプチャする時、センサーヘッドは発熱します。熱を逃さないと故障の原因となります。取り付ける前に、インラインプロファイル測定器の放熱対策 を参考にして現場の放熱条件を評価してください。 |
センサーヘッドを以下の2つの方法で取り付けられます。
-
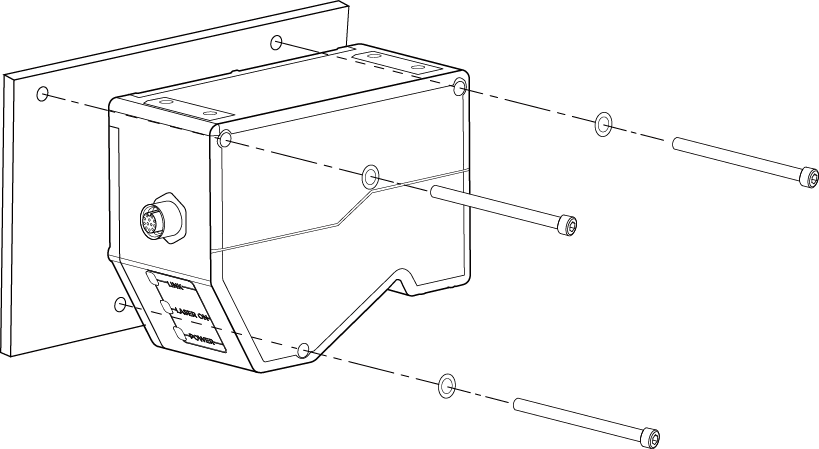
側面取付(推奨)
-
上面取り付け
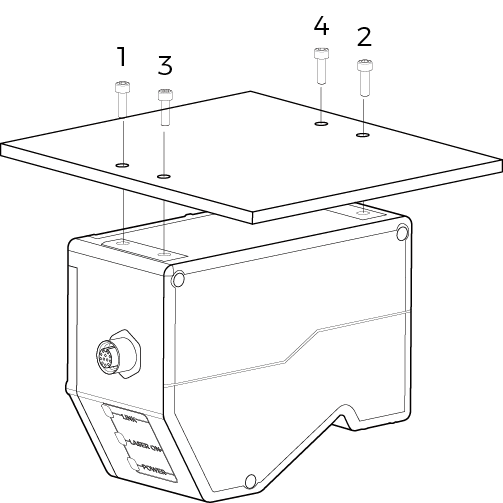
実際のニーズに応じて取り付けてください。インラインプロファイル測定器取付の詳しい説明は、設置と接続 をお読みください。
インラインプロファイル測定器のトリガー方法の確認
複数の方法で測定器をトリガーできます。また、データ取得とラインスキャンも異なる方法でトリガーできます。
データ取得とラインスキャンは、それぞれ2つの方法でトリガーします。
-
データ取得:
-
外部トリガー:外部デバイスから受信した信号によってデータ取得をトリガーします。
-
ソフトトリガー:Mech-MSR、Mech-Eye Viewer、Mech-Eye APIまたは GenIcam 対応ソフトウェアによってトリガーします。3D測定・検査ソリューションに、ソフトトリガーとはMech-MSRによってデータの取得をトリガーすることです。
-
-
ラインスキャン:
-
エンコーダー:エンコーダーの信号によってラインスキャンをトリガーします。
-
固定頻度:一定の頻度でラインスキャンをトリガーします。
-
インラインプロファイル測定器は、以下のような組合せ方法でトリガーできます。トリガー方法組み合わせ の内容を参考にして現場のニーズに合わせて選択してください。
| 外部トリガー | ソフトトリガー | |
|---|---|---|
エンコーダー |
||
固定頻度 |