Siemens S7 Client
Mech-MSRは外部機器とSiemens S7 Client通信を行うことができます。以下の内容を読む前に、Mech-MSR で 通信設定 が完了していることを確認してください。
概要
Siemens S7シリーズPLCは、TIA Portalソフトウェアを通じてMech-MSRソフトウェアとSiemens S7クライアント通信を行います。この通信方式では、Mech-MSRはクライアントとして動作し、PLCはサーバーとして動作します。
ハードウェアとソフトウェアの要件
ハードウェア
-
以下のSiemens S7シリーズPLCをサポートしています。
-
S7-300:内蔵PNポートまたはCP343-1
-
S7-400:内蔵PNポートまたはCP443-1
-
S7-1200:特別なモジュールは不要
-
S7-1500:特別なモジュールは不要
-
-
220V AC - 24V DC電源アダプタ
-
以下のIPCをサポートしています。
-
Mech-Mindが提供する標準IPC(推奨)
-
自分で準備した設備
-
-
LANケーブル
ソフトウェア
-
Siemens PLCプログラミングソフトウェア:TIA Portal V15.1
-
3D測定・検査ソフトウェア Mech-MSR(最新版の使用を推奨)
-
Siemens TIA PortalソフトウェアがMech-MSRとSiemens PLC Snap 7通信を行うためのインターフェースファイル
MM MSR Interface.db(データ通信を実現するため)
|
入力信号一覧(PLCからMech-MSRへ)
| 名前 | 説明 | データ型 | DBオフセット |
|---|---|---|---|
有効化 |
ブール値 |
0.0 |
|
コマンドトリガー |
ブール値 |
0.1 |
|
データ読み取り完了 |
ブール値 |
0.2 |
|
出力データリセット |
ブール値 |
0.3 |
|
BIT_SPARE_1 |
予約語 |
ブール値 |
0.4 |
BIT_SPARE_2 |
予約語 |
ブール値 |
0.5 |
BIT_SPARE_3 |
予約語 |
ブール値 |
0.6 |
BIT_SPARE_4 |
予約語 |
ブール値 |
0.7 |
BYTE_SPARE_1 |
予約語 |
バイト |
1.0 |
BYTE_SPARE_2 |
予約語 |
バイト |
2.0 |
BYTE_SPARE_3 |
予約語 |
バイト |
3.0 |
コマンドコード |
整数 |
4.0 |
|
CMD_PARAM_1 |
コマンドパラメータ1 |
整数 |
6.0 |
CMD_PARAM_2 |
コマンドパラメータ2 |
整数 |
8.0 |
CMD_PARAM_3 |
コマンドパラメータ3 |
整数 |
10.0 |
CMD_PARAM_4 |
コマンドパラメータ4 |
整数 |
12.0 |
CMD_PARAM_5 |
コマンドパラメータ5 |
整数 |
14.0 |
CMD_PARAM_6 |
コマンドパラメータ6 |
整数 |
16.0 |
CMD_PARAM_7 |
コマンドパラメータ7 |
整数 |
18.0 |
CMD_PARAM_8 |
コマンドパラメータ8 |
整数 |
20.0 |
CMD_PARAM_9 |
コマンドパラメータ9 |
整数 |
22.0 |
CMD_PARAM_10 |
コマンドパラメータ10 |
整数 |
24.0 |
VAR_1 |
変数1 |
浮動小数点数 |
26.0 |
VAR_2 |
変数2 |
浮動小数点数 |
30.0 |
VAR_3 |
変数3 |
浮動小数点数 |
34.0 |
VAR_4 |
変数4 |
浮動小数点数 |
38.0 |
VAR_5 |
変数5 |
浮動小数点数 |
42.0 |
VAR_6 |
変数6 |
浮動小数点数 |
46.0 |
VAR_7 |
変数7 |
浮動小数点数 |
50.0 |
VAR_8 |
変数8 |
浮動小数点数 |
54.0 |
VAR_9 |
変数9 |
浮動小数点数 |
58.0 |
VAR_10 |
変数10 |
浮動小数点数 |
62.0 |
WORD_SPARE |
予約語 |
ワード(0~30) |
66.0 |
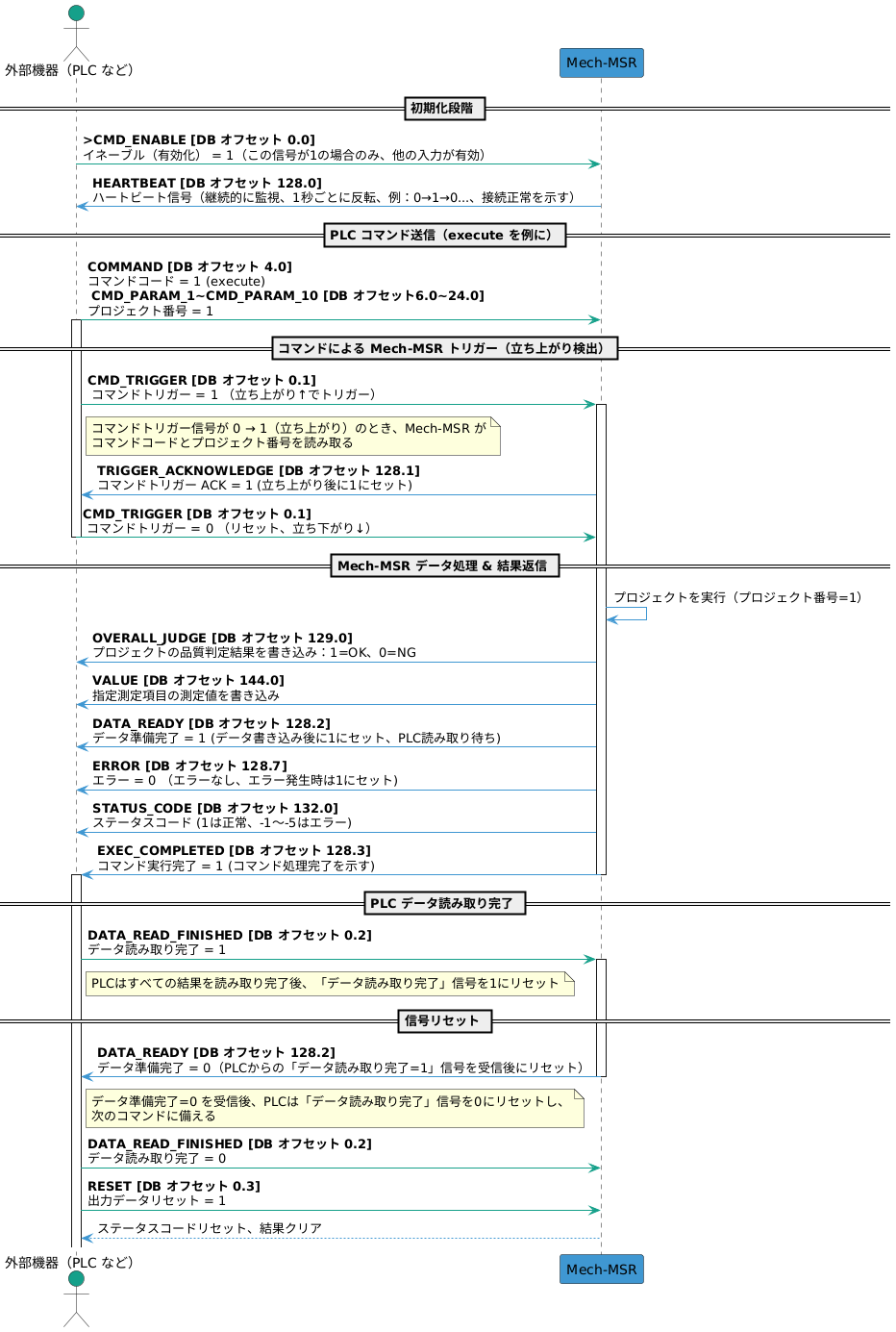
CMD_TRIGGER(コマンドトリガー)
コマンドトリガー信号が0から1(立ち上がり)に変わるとき、Mech-MSRはコマンドコードとコマンドパラメータを読み取ります。Mech-MSRが コマンドトリガー ACK 信号を返すと、コマンドトリガー信号を0に設定できます。
DATA_READ_FINISHED(データ読み取り完了)
PLCがデータの読み取りを完了したら、この信号を1に設定します。データ準備完了 信号が0に変わった後、この信号を0に設定できます。
RESET(出力データリセット)
この信号が1に設定されると、PLCが受信した判定結果と測定結果(出力)がクリアされます。この時、PLCは新しいコマンドを送信できます。関連するステータスコードもリセットされます。
COMMAND(コマンドコード)
現在のプロトコルでサポートされているコマンドおよび対応するコマンドコード、コマンドパラメータは下表の通りです。
| コマンド | コマンドコード | コマンドパラメータ | 説明 |
|---|---|---|---|
execute |
1 |
プロジェクト番号、1回に1つのみ設定可能 |
プロジェクトの実行をトリガーし、そのプロジェクトの判定結果と測定結果を取得するために使用されます。 |
trigger |
2 |
プロジェクト番号、1回に1〜4個設定可能 |
プロジェクトの実行をトリガーするために使用されます。 |
return |
3 |
プロジェクト番号、1回に1つのみ設定可能 |
指定したプロジェクトの判定結果と測定結果を取得するために使用されます。 |
judge |
4 |
指定したプロジェクトの全体判定結果または個別の測定項目の品質判定結果を取得するために使用されます。 |
|
value |
5 |
主に指定されたプロジェクトの測定値を取得するために使用されます。 |
|
recipe |
6 |
プロジェクト番号、パラメータレシピ番号 |
プロジェクトに使用するパラメータレシピを切り替えるために使用されます。 |
solution |
7 |
ソリューションID |
ソリューションを切り替えるために使用されます。 |
SetNumVar |
8 |
グローバル変数番号、1 回に1つのみ設定可能 |
数値型のグローバル変数に値を設定するために使用され、変数値は VAR_INPUT を通じて入力されます。 |
GetNumVar |
9 |
グローバル変数番号、1 回に1つのみ設定可能 |
数値型のグローバル変数の値を読み取るために使用され、読み取り結果は VALUE を通じて返されます。 |
|
VAR_INPUT(変数入力)
SetNumVar コマンドを実行する際、設定する値は VAR_INPUT に書き込まれます。
| 名前 | 説明 | データ型 | DBオフセット |
|---|---|---|---|
VAR_1 |
変数1 |
浮動小数点数 |
26.0 |
VAR_2 |
変数2 |
浮動小数点数 |
30.0 |
VAR_3 |
変数3 |
浮動小数点数 |
34.0 |
VAR_4 |
変数4 |
浮動小数点数 |
38.0 |
VAR_5 |
変数5 |
浮動小数点数 |
42.0 |
VAR_6 |
変数6 |
浮動小数点数 |
46.0 |
VAR_7 |
変数7 |
浮動小数点数 |
50.0 |
VAR_8 |
変数8 |
浮動小数点数 |
54.0 |
VAR_9 |
変数9 |
浮動小数点数 |
58.0 |
VAR_10 |
変数10 |
浮動小数点数 |
62.0 |
出力信号一覧(Mech-MSRからPLCへ)
| 名前 | 説明 | データ型 | DBオフセット |
|---|---|---|---|
ハートビート信号 |
ブール値 |
128.0 |
|
コマンドトリガー ACK |
ブール値 |
128.1 |
|
データ準備完了 |
ブール値 |
128.2 |
|
コマンド実行完了 |
ブール値 |
128.3 |
|
BIT_SPARE_1 |
予約語 |
ブール値 |
128.4 |
BIT_SPARE_2 |
予約語 |
ブール値 |
128.5 |
BIT_SPARE_3 |
予約語 |
ブール値 |
128.6 |
エラー |
ブール値 |
128.7 |
|
全体判定結果 |
ブール値 |
129.0 |
|
JUDGE_SPARE_1 |
予約語 |
ブール値 |
129.1 |
JUDGE_SPARE_2 |
予約語 |
ブール値 |
129.2 |
JUDGE_SPARE_3 |
予約語 |
ブール値 |
129.3 |
JUDGE_SPARE_4 |
予約語 |
ブール値 |
129.4 |
JUDGE_SPARE_5 |
予約語 |
ブール値 |
129.5 |
JUDGE_SPARE_6 |
予約語 |
ブール値 |
129.6 |
JUDGE_SPARE_7 |
予約語 |
ブール値 |
129.7 |
BYTE_SPARE_1 |
予約語 |
バイト |
130.0 |
BYTE_SPARE_2 |
予約語 |
バイト |
131.0 |
ステータスコード |
整数 |
132.0 |
|
BYTE_SPARE_3 |
予約語 |
バイト |
134.0 |
BYTE_SPARE_4 |
予約語 |
バイト |
135.0 |
判定結果 |
ブール値(0~63) |
136.0 |
|
測定結果と変数値 |
浮動小数点数(0~63) |
144.0 |
TRIGGER_ACKNOWLEDGE(コマンドトリガー ACK)
Mech-MSRが コマンドトリガー 信号の立ち上がりを受信すると、この信号が1に設定されます。コマンドトリガー信号の立ち下がり時に、この信号が0に設定されます。
DATA_READY(データ準備完了)
Mech-MSRが出力ポートにデータを書き込み、PLCが読み取るのを待ちます。データ読み取り完了 信号が1のとき、この信号は0に設定されます。
OVERALL_JUDGE(全体判定結果)
プロジェクトの総合判定結果で、1 は合格(OK)、0 は不合格(NG)となります。
| Mech-MSRの 出力管理 画面でプロジェクトに品質判定ルールを設定し、品質判定に必要な測定項目を決定する必要があります。設定が完了した後、プロジェクトを実行することで有効な品質判定結果が得られます。 |
STATUS_CODE(ステータスコード)
Mech-MSR が返す可能性のあるステータスコードは以下の通りです。
-
正常ステータスコード:1、コマンドが正常に実行されたことを示します。
-
エラーステータスコード:-1、-2、-3、-4、-5。詳細については、エラーコードの説明 をご参照ください。
JUDGE(判定結果)
出力管理 画面の「通信出力」タブに追加された測定項目の品質判定結果で、1 は合格(OK)、0 は不合格(NG)を示します。
| 単一のプロジェクトに対して、最大64個の判定結果を一度に出力することがサポートされています。 |
VALUE(測定結果)
VALUE モジュールは、以下のデータを返すことができます。
-
出力管理 画面の「通信出力」タブに追加された測定項目の測定結果。
-
GetNumVarコマンドを実行する際、読み取られた数値型グローバル変数の値。
| 単一のプロジェクトに対して、最大 64 個の測定値を一度に出力することがサポートされています。 |