インラインプロファイル測定器
機能
一般的に測定プロジェクトの開始ステップとして使用され、画像または点群データを取得するために使用されます。このステップを使用して、Mech-Eye 3Dインラインプロファイル測定器(以下、「測定器」)に接続してデータを取得するか、仮想モードでローカルに保存されたデータを読み込むことができます。
使用フロー
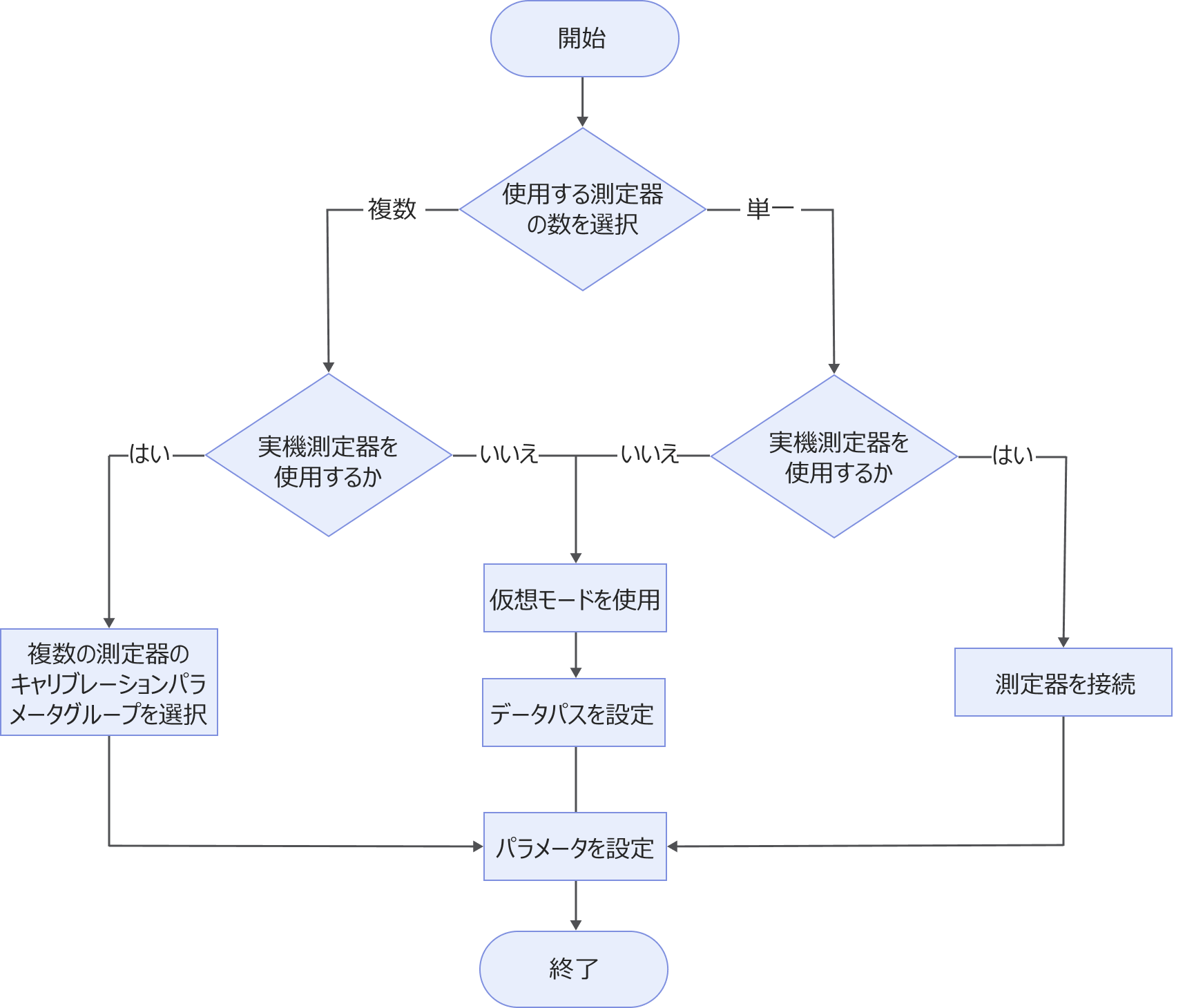
このステップの使用フローは以下の通りです。
-
使用する測定器の数を選択します。
-
実機測定器を使用 するか、ローカルデータを読み込む かを決定します。
-
パラメータ を設定します。
-
ステップを実行し、実行結果を確認 します。
実機測定器を使用する場合
事前準備
-
単台
-
複数
-
3D測定システムのハードウェア設置 を完了します。
-
Mech-Eye Viewerで関連設定を行います。
-
Mech-Eye Viewerで インラインプロファイル測定器を接続 します。
-
| Mech-Eye Viewer 2.3.4以上のバージョンをサポートしています。 |
-
複数台プロファイル測定器のキャリブレーション が完了しました。
-
接続するデバイスのパラメータグループは、Mech-Eye Viewerで設定が完了しました。
| Mech-Eye Viewer 2.5.0以上のバージョンをサポートしています。 |
操作手順
-
単台
-
複数
-
このステップをプロジェクト編集エリアにドラッグします。
-
パラメータ欄 で カメラモード を 単台 に設定します。
-
カメラを選択 をクリックし、カメラとキャリブレーションパラメータグループを選択 画面に入ります。
ここでは、カメラはプロファイル測定器を指します。 -
カメラリストから接続するカメラを選択し、そのカメラ番号の上にカーソルを合わせ、
 をクリックしてカメラに接続します。 が
をクリックしてカメラに接続します。 が  に変わった場合、カメラの接続が成功したことを示します。
に変わった場合、カメラの接続が成功したことを示します。
-
カメラが接続されると、キャリブレーションパラメータグループ のドロップダウンリストからキャリブレーションパラメータグループを選択し、OK をクリックします。これにより、一部のパラメータ が自動で更新されます。
-
単台モードでキャリブレーション結果を適用する場合は、シーンに応じて 傾き補正、S/Z形スキャンステッチング、または N点キャリブレーションを適用 にチェックを入れ、画面の指示に従って対応するキャリブレーション結果を選択し、関連パラメータの設定を完了してください。
-
傾斜キャリブレーション(自動)または 傾斜キャリブレーション(手動)の結果を適用する場合は、傾き補正 にチェックを入れてください。
-
スティッチングキャリブレーション結果 を適用する場合は、S/Z形スキャンステッチング にチェックを入れ、スキャンセグメント設定 で エディタを開く をクリックして、スキャンセグメントの設定を完了してください。
-
N点キャリブレーション結果 を適用する場合は、N点キャリブレーションを適用 にチェックを入れ、取得開始位置X座標、取得開始位置Y座標、取得開始位置Z座標 を設定してください。
-
傾き補正 と S/Z形スキャンステッチング は同時にチェックを入れることができません。つまり、これら2種類のキャリブレーション結果を同時に適用することはできません。
-
-
パラメータ を設定します。
-
ステップを実行してデータを取得します。
-
このステップをプロジェクト編集エリアにドラッグします。
-
カメラモード を 複数台 に設定します。
-
パラメータ欄 の キャリブレーション結果(複数プロファイル測定器) で、キャリブレーションパラメータ結果を選択します。
-
複数台プロファイル測定器のキャリブレーション結果 は、ソリューションフォルダ内の
calibrationフォルダに保存されます。 -
測定器の 型番、ID、および 関心領域設定 は、キャリブレーション時と一致している必要があります。
-
-
パラメータグループを選択すると、カメラ情報 に使用するデバイス情報が自動更新されます。
-
スティッチングキャリブレーション結果 を適用する場合は、S/Z形スキャンステッチング にチェックを入れて 結果 を選択します。その後、スキャンセグメント設定 で エディタを開く をクリックして、スキャンセグメントの設定を完了してください。
-
パラメータ を設定します。
-
ステップを実行してデータを取得します。
ローカルデータを読み込む場合
操作手順
-
単台
-
複数
-
このステップをプロジェクト編集エリアにドラッグします。
-
パラメータ欄 で カメラモード を 単台 に設定し、仮想モード を有効にします。
-
データパス パラメータの右にある
 をクリックします。
をクリックします。 -
ポップアップウィンドウでデータが保存されているフォルダを選択し、開く をクリックします。
選択したフォルダに仮想カメラの有効なデータがない場合、仮想カメラアシスタント ウィンドウがポップアップします。その場合、仮想カメラのMRAWファイルが保存されているフォルダパスを手動で選択する必要があります。仮想カメラのMRAWファイルを保存するには、Mech-Eye Viewer 2.3.4以上のバージョンを使用する必要があります。 
-
パラメータ を設定します。
-
このステップを実行すると、ローカルに保存されたデータを読み込むことができます。
-
このステップをプロジェクト編集エリアにドラッグします。
-
パラメータ欄 で カメラモード を 複数台 に設定し、仮想モード を有効にします。
-
データパス パラメータの右にある
をクリックします。 -
ポップアップウィンドウでデータが保存されているフォルダを選択し、開く をクリックします。すると、キャリブレーションパラメータグループ が自動的に更新されます。
-
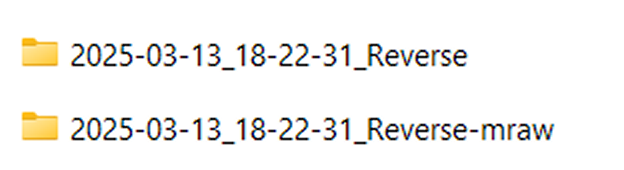
下図のように、選択したフォルダには少なくとも1グループのキャリブレーションデータとMRAW形式の画像データが含まれている必要があります。
-
キャリブレーションデータとMRAW形式の画像データのフォルダ名は、データ保存日付と時刻、複数の測定器のレイアウト、およびカスタム拡張子で構成されます。カスタム拡張子を使用する場合、フォルダ名のカスタム部分は完全に一致している必要があり、一致しない場合はデータの読み込みに失敗します。
-
-
パラメータ を設定します。
-
ステップを実行し、ローカルに保存されたデータを読み込みます。
パラメータ説明
カメラモード
現在のプロジェクトで 単台 または 複数台 の測定器を使用するかを選択します。
カメラタイプ
使用する測定器の種類を選択します。現在、LNXCamera のみが選択可能で、これはMech-Eye 3Dインラインプロファイル測定器を使用することを意味します。
基本設定
よく使うパラメータ
| パラメータ | 説明 | ||
|---|---|---|---|
仮想モード |
デフォルトでは無効です。ローカルに保存されたデータを使用してプロジェクトを実行する場合は、仮想モード を有効にしてください。 |
||
カメラID |
接続するカメラの番号を表示します。カメラを選択 をクリックして接続するカメラを選択します。詳細な操作は、操作手順 をご参照ください。 |
||
IPアドレス |
測定器のIPアドレスです。
|
||
設定パラメータグループ |
Mech-Eye Viewerで設定されたパラメータグループで、測定器はこの設定に従ってデータを取得します。 |
||
設定パラメータグループを更新 |
Mech-Eye Viewerで選択した設定パラメータグループを変更し、変更が保存された場合は、更新を取得 をクリックして更新できます。
|
||
キャリブレーションパラメータグループ |
選択した測定器で使用するキャリブレーションパラメータグループです。 |
||
傾き補正 |
単台 の測定器を使用している場合のみ表示されます。 チェックを入れると、傾斜キャリブレーション(自動)または 傾斜キャリブレーション(手動)の結果を適用し、取得データに対して幾何補正を行います。これにより、センサーヘッドの取り付け傾き(X、Y、Z軸周りの回転)によって生じるデータの変形や測定誤差を除去できます。 チェックを入れた後、傾斜キャリブレーション結果 を選択する必要があります。
|
||
S/Z形スキャンステッチング |
測定器で同一対象物を往復スキャン(S字)または同方向スキャン(Z字)し、分割データの取得およびデータステッチングを行う必要がある場合は、このパラメータにチェックを入れてください。ステッチングキャリブレーション結果 を適用することで、データ取得およびステッチングの精度を確保できます。 チェックを入れた後、ステッチングキャリブレーション結果 を選択する必要があります。
|
||
N点キャリブレーションを適用 |
単台 の測定器を使用している場合のみ表示されます。 チェックを入れると、N点キャリブレーション結果 を適用し、サーフェスデータ座標系と装置座標系との対応関係を確立します。 チェックを入れた後、N点キャリブレーション結果 を選択する必要があります。 |
||
スキャンセグメント設定 |
単台 または 複数台 の測定器を使用し、S/Z形スキャンステッチング にチェックを入れ、ステッチングキャリブレーション結果 を選択した後にのみ表示されます。 エディタを開く をクリックすると、測定器による各スキャンの開始点および終了点の装置座標系内での位置を記録できます。 |
||
取得開始位置X座標 |
単台 の測定器を使用し、N点キャリブレーションを適用 にチェックを入れた後にのみ表示されます。 測定器がデータ取得を行う際の開始位置の、装置座標系におけるX、Y、Z座標です。 |
||
画像反転 |
取得した画像を水平方向に反転(Y軸に沿って反転)し、画像のミラー問題を解消します。 単台 の測定器を使用する場合、測定器自身のY軸方向と、対象物がセンサーヘッドに対して移動する方向が逆であると、取得画像にミラー問題が発生します。この場合は、このパラメータにチェックを入れてください。 複数台 の測定器を使用する場合、キャリブレーション時のスキャン方向と実際のデータ取得時のスキャン方向が一致しない場合に、このパラメータにチェックを入れることで、取得画像データを期待どおりにできます。
|
||
プロファイル測定器のレイアウト |
複数台プロファイル測定器のレイアウトは、並列、対向、対面 または 環状 から選択できます。詳細については、プロファイル測定器のレイアウトを確認 をご参照ください。 |
||
融合後の画像を出力 |
複数台の測定器で取得した画像を合成するために使用します。例えば、2台の並列に配置される測定器で取得したデータを1枚の画像に統合できます。
|
詳細パラメータ
| パラメータ | 説明 | ||
|---|---|---|---|
再接続回数 |
ステップ実行時にソフトウェアがカメラへの接続に失敗した場合、このパラメータは再接続を試みる最大回数を指定します。 初期値:3
|
||
サーフェスデータを出力 |
複数台プロファイル測定器のキャリブレーションが 環状 レイアウトの場合にのみ表示されます。 環状レイアウトの測定器はデフォルトで点群データを取得します。各測定器が取得したサーフェスデータを出力したい場合は、このパラメータにチェックを入れる必要があります。 |
||
点群に強度情報を含める |
複数台プロファイル測定器のキャリブレーションが 環状 レイアウトの場合にのみ表示されます。 このパラメータは、出力する点群データに各点の強度情報を含めるかどうかを指定します。デフォルトでチェックが入っています。 |
トリガー設定
| パラメータ | 説明 | ||
|---|---|---|---|
データ取得状態 |
データ取得トリガーソース が 外部トリガー の場合、このパラメータを有効にすると、測定器は外部入力のトリガー信号に基づいてデータ取得を行います。 データ取得トリガーソース が ソフトウェアトリガー の場合、このパラメータを有効にすると、ソフトウェアが信号を送信して測定器のデータ取得をトリガーします。
|
||
タイムアウト |
データ取得のタイムアウト時間を設定します。データ取得の1サイクルに必要な時間以上に設定する必要があり、これによりソフトウェアはタイムアウト時間内に完全なデータを受信できます。
|
||
自動入力されるパラメータ |
測定器に接続後、以下のパラメータは実際の状況に基づいて自動的に入力され、Mech-MSRで変更できません。変更する必要がある場合は、Mech-Eye Viewerで測定器を接続し、パラメータエリアで調整を行ってください。
|
仮想設定(「仮想モード」を有効にした場合に表示)
| パラメータ | 説明 | ||
|---|---|---|---|
読み込みモード |
画像の読み込みモードを指定します。 オプション:
|
||
現在のフレーム |
現在読み込んでいる画像のファイル名を表示します。 |
出力説明
このステップの出力は通常、深度画像および強度画像を含むサーフェスデータであり、他のステップの入力として使用できます。
複数台プロファイル測定器のキャリブレーションが 環状 レイアウトの場合、このステップの出力は点群となり、点群関連のステップの入力として使用できます。
トラブルシューティング
|
CV-E0201
エラー:カメラに接続できませんでした。
考えられる原因:
-
カメラ、IPC、ルーター/スイッチのケーブル接続に問題があります。
-
ファイアウォールやアンチウイルスソフトウェアがソフトウェアの使用をブロックしています。
-
カメラのIPアドレスが変更されました。
-
LANポートの競合が発生しています。
解決策:
-
カメラ、IPC、ルーター/スイッチのケーブル接続を確認し、正常であることを確認してください。
-
コンピュータのファイアウォールを無効にするか、Mech-MSRをファイアウォールのホワイトリストに追加し、その後コンピュータのアンチウイルスソフトウェアとセキュリティソフトウェアを無効にしてください。
-
カメラのIPアドレスが正しいか確認してください。
-
カメラに接続しているLANポート以外のLANポートを無効にし、Mech-MSRを実行してカメラを再接続してください。
上記の手順をすべて試してもカメラが見つからない場合は、カメラの電源を切り、再起動してください。
CV-E0202
エラー:カメラ XXX にはアクセス権限がありません。
解決策:ログを確認し、ネットワークやカメラのファームウェアが正常であることを確認した後、再試行してください。それでも解決しない場合、テクニカルサポートにお問い合わせください。
CV-E0203
エラー:カメラ XXX に接続できませんでした。カメラが応答しません。
考えられる原因:カメラのIPアドレスまたはポートが正しく設定されていません。
カメラのIPアドレスおよびポートが正しいか確認してください。
CV-E0204
エラー:カメラ XXX に接続できませんでした。カメラはGenICamインターフェースを通じてサードパーティ製ソフトウェアで接続されます。
解決策:カメラがGenICamインターフェースを通じてサードパーティ製のソフトウェアに接続されていないことを確認してください。
CV-E0205
エラー:現在のバージョンのカメラファームウェアはサポートされていません。
解決策:Mech-Eye Viewerでカメラに接続する前に、カメラのファームウェアをアップグレードしてください。
CV-W0208
エラー:データ取得デバイスの接続に失敗しました。
解決策:
-
デバイスが使用可能な状態であることを確認してください。
-
コンピュータとデバイスが同じネットワークセグメントにあることを確認してください。
-
デバイスを使用している可能性があるソフトウェアがすべて閉じられていることを確認してください。
-
ファイアウォールが無効化されているか、またはMech-MSRをファイアウォールのホワイトリストに追加してください。
CV-E0210
エラー:実際のカメラが接続されていません。外部デバイスによるプロジェクトの実行トリガーはサポートされていません。
考えられる原因:画像取得ステップで「仮想モード」が有効になっており、プロジェクトで使用される画像データはリアルタイムで取得された画像ではありません。
解決策:画像取得ステップで「仮想モード」を無効にし、実際のカメラを接続してください。
CV-W0215
以下のようなエラーメッセージが表示される可能性があります。
-
取得したプロファイルデータが空です。
-
取得したデータの幅が0です。
-
取得したデータの高さが0です。
-
深度画像データが無効です。
-
強度画像データが無効です。
-
エンコーダー配列が無効です。
-
エンコーダー配列が空です。
解決策:測定器の設定を確認し、再度画像データを取得してください。それでも問題が解決しない場合は、テクニカルサポートにお問い合わせください。
CV-W0218
エラー:画像の深度値がすべてNaNです。
考えられる原因:
-
カメラの露出が不足しています。
-
対象物がセンサーヘッドの作業距離内にありません。
-
センサーヘッドの位置が適切ではありません。
解決策:
-
カメラの露出パラメータを調整するか、照明を追加してください。
-
対象物がセンサーヘッドの作業距離内にあることを確認してください。
-
センサーヘッドの位置を補正または調整してください。
CV-W0219
エラー:接続されているプロファイル測定器の一部の重要なパラメータが一致していません。
考えられる原因:
-
測定器の型番、ID、または関心領域設定がキャリブレーション時と一致していません。
-
測定器間のトリガー設定(トリガー遅延を除く)および解像度設定が一致していません。
解決策:
-
現在接続されている測定器の型番、ID、および関心領域設定がキャリブレーション時と一致していることを確認してください。
-
測定器間のトリガー設定(トリガー遅延を除く)および解像度設定が一致していることを確認してください。
CV-W0261
エラー:データ取得デバイスの接続に失敗しました。
考えられる原因:
-
データ取得デバイスがIPCに接続されていません。
-
入力されたデバイスのIPアドレスがMech-Eyeデバイスに対応していません。
解決策:
-
データ取得デバイスがIPCに接続されていることを確認してください。
-
入力されたデバイスのIPアドレスがMech-Eyeデバイスに対応していることを確認してください。
CV-W0263
エラー:現在の操作はサポートされていません。
考えられる原因:
-
カメラのファームウェアバージョンとMech-Eye APIのバージョンが一致していません。
-
現在使用しているカメラがこの操作をサポートしていません。
解決策:
-
使用しているファームウェアバージョンとソフトウェアバージョンが一致していることを確認してください。
-
使用しているカメラが実行しようとしている操作をサポートしていることを確認してください。
CV-W0265
エラー:ソフトウェア内部でエラーが発生しました。
考えられる原因:Mech-MSRソフトウェア内部で未知のエラーが発生しました。
解決策:カメラを再起動し、再度接続を試みてください。それでも接続できない場合は、テクニカルサポートにお問い合わせください。
CV-W0266
エラー:画像データは空です。
考えられる原因:
-
パラメータ欄で「データ取得状態」が有効になっていません。
-
データ取得デバイスにエラーが発生しています。
解決策:
-
「データ取得状態」が有効になっていることを確認してください。
-
デバイスが正常であることを確認してください。
CV-W0267
エラー:ソフトウェア内部でエラーが発生しました。
考えられる原因:Mech-MSRソフトウェア内部で未知のエラーが発生しました。
解決策:カメラを再起動し、再度接続を試みてください。それでも接続できない場合は、テクニカルサポートにお問い合わせください。
CV-W0269
エラー:現在の操作はタイムアウトしました。
考えられる原因:データ取得またはデータ取得デバイスへの接続にかかる時間が設定された「タイムアウト」パラメータ値を超えました。
解決策:
-
Mech-MSRが正常に画像データを取得できることを確認してください。
-
「タイムアウト」パラメータ値を適切に設定してください。
CV-W0272
エラー:データ取得が開始されていません。
考えられる原因:パラメータ欄で「データ取得状態」が有効になっていません。
解決策:「データ取得状態」が有効になっていることを確認してください。
CV-W0277
エラー:ソフトウェア内部でエラーが発生しました。
考えられる原因:Mech-MSRソフトウェア内部で未知のエラーが発生しました。
解決策:カメラを再起動し、再度接続を試みてください。それでも接続できない場合は、テクニカルサポートにお問い合わせください。
CV-W0279
エラー:測定器は使用中で、接続できません。
考えられる原因:デバイスが別のIPCに接続されています。
解決策:接続する前に、デバイスが他のIPCに接続されていないことを確認してください。
CV-W0280
エラー:測定器の内部画像キャッシュがいっぱいです。
考えられる原因:
-
データ転送の制限(例:ネットワークの不安定さや帯域幅の不足)により、キャッシュが適時にクリアされません。
-
スキャンレートが高すぎるため、デバイスのキャッシュ処理能力や転送能力を超えています。
-
取得する画像データ量が多すぎるため、キャッシュの使用量が増加し、ストレージリソースがなくなります。
解決策:
-
ネットワーク接続を確認・最適化し、十分な帯域幅を確保してください。必要に応じてネットワーク環境やデバイスを変更してください。
-
スキャンレートを下げてください。
-
関心領域(ROI)を調整し、1フレームあたりのデータ量を削減してください。