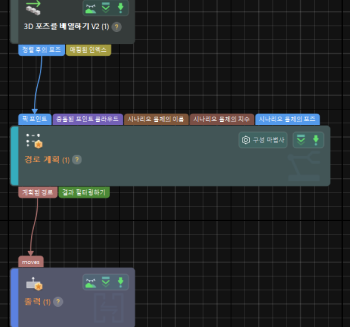
경로 계획
기능 설명
이 스텝은 입력된 비전 포인트를 사용하여 로봇 경로를 계획하고 성공적으로 계획된 로봇 경로를 출력하는 데 사용됩니다.
|
"경로 계획" 스텝의 기능은 Mech-Viz와 관련되어 있으며, 이 스텝을 사용하려면 먼저 Mech-Viz 소프트웨어를 설치하고 소프트웨어 라이센스를 획득해야 합니다. |
|
응용 시나리오
이 스텝은 일반적으로 표준 인터페이스 또는 Adapter 통신 방식을 사용하고, 비전 포인트 근처의 로봇 이동 경로만 계획하면 되는 프로젝트에서 사용됩니다. 시나리오를 구축하고 비전 포인트와 포인트 클라우드를 입력한 후 이 스텝에서는 충돌 감지와 경로 계획을 거쳐 충돌 없는 로봇 이동 경로를 출력합니다.
일반적으로 이 스텝의 앞/뒤에 연결되는 스텝은 다음과 같습니다.
-
앞에 연결되는 스텝: 포즈 조정과 포즈 처리 관련 스텝.
-
뒤에 연결되는 스텝: "출력" 스텝("포트 유형"을 "Predefined(robot path)"로 설정해야 함).
입력 및 출력
입력
| 입력 포트 | 데이터 유형 | 설명 |
|---|---|---|
픽 포인트 |
Pose[] |
물체 픽 포인트 목록. |
픽 포인트 정보 |
JsonValue |
픽 포인트 관련 정보(물체 이름, 픽 포인트 이름, 픽 포인트 레이블 등 포함). |
충돌 포인트 클라우드 |
PointCloud[] |
이 포트에 입력된 포인트 클라우드는 말단장치와의 충돌 감지에 사용됩니다("경로 계획 도구"에서 포인트 클라우드 충돌 감지를 활성화해야 함). |
픽 포인트 레이블 |
String[] |
워크오브젝트 라이브러리의 픽 포인트 레이블로, 일반적으로 표준 인터페이스 통신 시 상위 컨트롤러와의 레이블 통신에 사용됩니다. |
물체 치수 |
Size3D[] |
물체의 치수. |
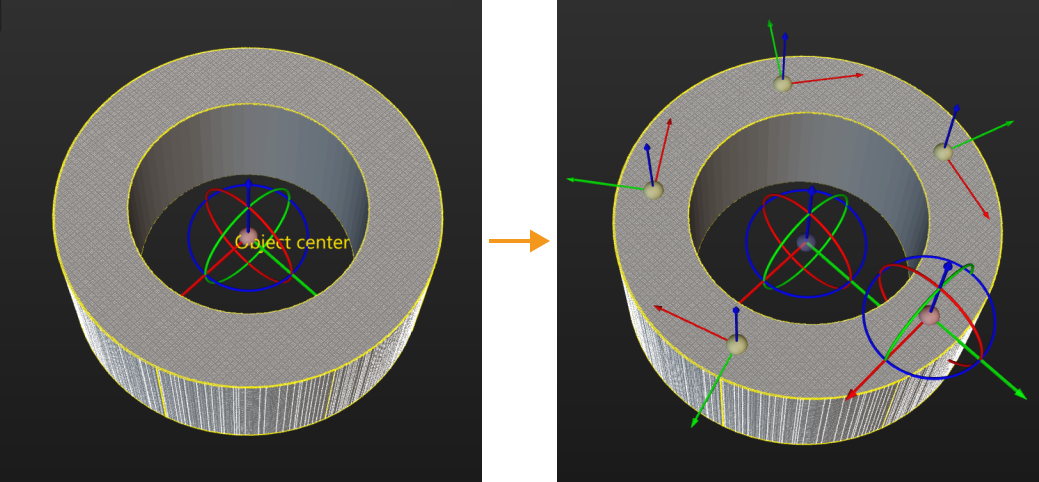
픽 포인트 오프셋 |
Pose[] |
픽 포인트와 물체 중심점 사이의 오프셋. |
시나리오 물체 이름 |
String[] |
시나리오 물체 이름 목록. 목록에 있는 물체의 치수와 포즈가 업데이트됩니다. |
시나리오 물체 치수 |
Size3D[] |
시나리오 물체 치수 목록. 목록의 순서에 따라 시나리오 물체 치수가 업데이트됩니다. |
시나리오 물체 포즈 |
Pose[] |
시나리오 물체 포즈 목록. 목록의 순서에 따라 시나리오 물체 포즈가 업데이트됩니다. |
파라미터 설명
경로 계획 설정
| 파라미터 | 설명 |
|---|---|
작업 흐름 구성 |
파라미터 설명: 경로 계획 도구를 열어 드롭다운 목록에서 구성된 작업 흐름을 선택합니다. |
시나리오 물체 업데이트 |
파라미터 설명: 이 옵션을 활성화하면 스텝에 시나리오 물체 이름, 시나리오 물체 치수 및 시나리오 물체 포즈 입력 포트가 추가되며, 시나리오 물체의 포즈와 치수를 업데이트하는 데 사용됩니다. 기본값: 비활성화 |
응용 시나리오
| 파라미터 | 설명 |
|---|---|
시나리오 선택 |
파라미터 설명: 현재 솔루션의 응용 시나리오를 선택합니다. 값 리스트: 3D 템플릿 매칭(대상 물체 로드 및 언로드, 위치 결정/어셈블리 등), 디팔레타이징 및 기타 조정 설명:
기본값: 3D 템플릿 매칭(대상 물체 로드 및 언로드, 위치 결정/어셈블리 등) |
데이터 변환 방법 |
파라미터 설명: 이 스텝은 결과의 변환 방법을 선택하여 인식 결과를 피킹에 필요한 데이터 유형으로 전환할 수 있습니다. 값 리스트: 대상 물체의 중심점에 따른 피킹 전략 생성, 픽 포인트에 따른 피킹 전략 생성
기본값: 대상 물체의 중심점에 따른 피킹 전략 생성 |
포인트 클라우드 모델 필요 없는 물체 |
파라미터 설명: 포인트 클라우드 모델 필요 없는 물체를 선택하면, 해당 스텝에서 그 대상 물체의 피킹 관련 정보를 출력할 수 있습니다. 응용 시나리오가 "디팔레타이징 및 기타"인 경우, 해당 파라미터를 설정해야 합니다. |
충돌 감지 설정
| 파라미터 | 설명 |
|---|---|
포인트 클라우드가 카메라 좌표계에 있는지 여부 |
파라미터 설명: 포인트 클라우드가 카메라 좌표계에 있는 경우, 이 파라미터를 선택해야 합니다. 선택하면 포인트 클라우드가 로봇 기준 좌표계로 변환된 후 경로 계획 도구에 입력됩니다. 선택하지 않으면 포인트 클라우드가 직접 경로 계획 도구에 입력됩니다. 기본값: 선택되어 있음 |
비이동 기하학 물체 포인트 클라우드 제거 |
파라미터 설명: 활성화하면 Mech-Vision가 비이동 기하학 물체 유형의 충돌 모델과 겹치는 포인트 클라우드를 제거하여 포인트 클라우드가 충돌 감지에 미치는 영향을 방지합니다. 응용 시나리오가 "매칭(물체 로딩/언로딩, 위치 조정 조립 등)"인 경우 이 파라미터를 설정해야 합니다. 기본값: 선택 안 함 조절 설명: 픽 포인트에서 배치까지의 전체 과정에서 물체 충돌을 감지하려면 이 파라미터를 선택하고 관련 물체에 충돌 모델이 구성되어 있는지 확인하십시오. 이 파라미터는 워크오브젝트 라이브러리에서 이동 기하학을 사용하여 생성된 물체에는 적용되지 않습니다. |
물체 포인트 클라우드 검색 반지름 |
파라미터 설명: 물체 포인트 클라우드의 임의 점을 중심으로 검색 반지름 내의 포인트 클라우드가 제거됩니다. 비이동 기하학 물체 포인트 클라우드 제거를 선택한 경우 이 파라미터를 설정해야 합니다. 기본값: 3 mm |