3D 포즈를 배열하기 V2
파라미터 설명
이 스텝에서는 11가지 포즈 배열 방법을 제공합니다. 자세한 설명은 다음과 같습니다.
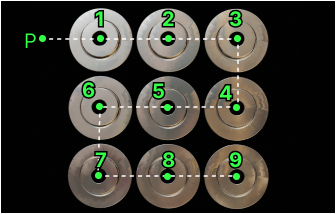
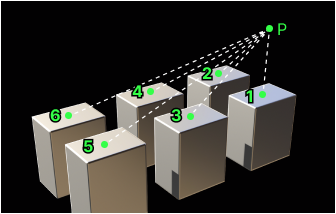
"S"자형으로 포즈 배열
기능 소개
지정된 참조 포즈와 행 및 열의 방향에 따라 행과 열로 포즈를 배열("행 방향"은 포즈 배열에서 우선순위로 지정됨)합니다. 이 유형은 일반적으로 가지런히 배열된 공작물 언로딩 또는 디팔레타이징에 사용됩니다.
파라미터 설명
| 파라미터 | 설명 |
|---|---|
행 방향 |
설명: 이 파라미터는 "S"자형 평면 배열할 때 행의 방향을 설정하는 데 사용됩니다. + 값 리스트: X축의 정방향, Y축의 정방향, Z축의 정방향, X축의 부방향, Y축의 부방향, Z축의 부방향. + 기본값: X축 정방향. |
열 방향 |
설명: 이 파라미터는 "S"자형 평면 배열할 때 열의 방향을 설정하는 데 사용됩니다. + 값 리스트: X축의 정방향, Y축의 정방향, Z축의 정방향, X축의 부방향, Y축의 부방향, Z축의 부방향. + 기본값: Y축 정방향. |
행 간격 |
설명: 이 파라미터는 "S"자형 평면 배열할 때 각 행 사이의 간격을 밀리미터(mm) 단위로 설정하는 데 사용됩니다. + 기본값: 100.000 mm |
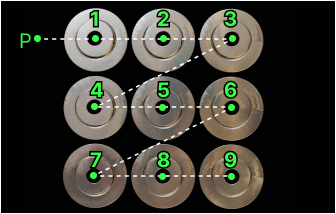
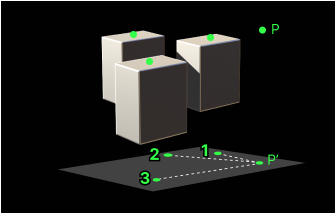
"Z"자형으로 포즈 배열
기능 소개
지정된 참조 포즈와 행 및 열의 방향에 따라 행과 열로 포즈를 배열("행 방향"은 포즈 배열에서 우선순위로 지정됨)합니다. 이 유형은 일반적으로 가지런히 배열된 공작물 언로딩 또는 디팔레타이징에 사용됩니다.
파라미터 설명
| 파라미터 | 설명 |
|---|---|
행 방향 |
설명: 이 파라미터는 "Z"자형으로 포즈 배열할 때 행의 방향을 설정하는 데 사용됩니다. + 값 리스트: X축의 정방향, Y축의 정방향, Z축의 정방향, X축의 부방향, Y축의 부방향, Z축의 부방향. + 기본값: X축 정방향. |
열 방향 |
설명: 이 파라미터는 "Z"자형으로 포즈 배열할 때 열의 방향을 설정하는 데 사용됩니다. + 값 리스트: X축의 정방향, Y축의 정방향, Z축의 정방향, X축의 부방향, Y축의 부방향, Z축의 부방향. + 기본값: Y축 정방향. |
행 간격 |
설명: 이 파라미터는 "Z"자형으로 포즈 배열할 때 각 행 사이의 간격을 밀리미터(mm) 단위로 설정하는 데 사용됩니다. + 기본값: 100.000 mm |
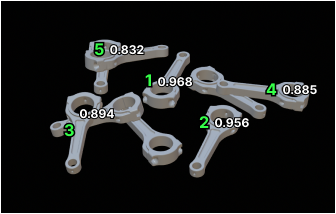
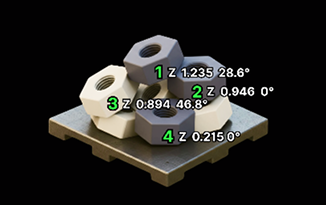
2차원 배열
기능 소개
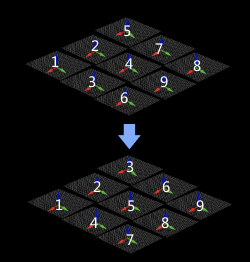
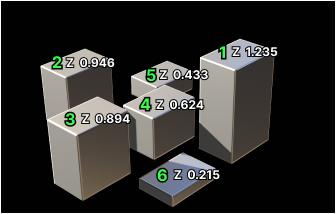
이 배열 방법은 두 가지 차원의 정보에 따라 포즈를 배열할 수 있습니다. 먼저 차원 1에 따라 포즈를 배열하고 레이어로 나눈 다음, 각 레이어 내에서 차원 2에 따라 배열합니다. 오름차순/내림차순을 조정할 수 있습니다. 배열 차원은 물체 높이, 각도 등 임의의 수치 유형이 될 수 있습니다.
파라미터 설명
| 파라미터 | 설명 |
|---|---|
차원 1 레이어 간격 |
파라미터 설명: 이 파라미터는 차원 1 레이어 분리 시의 간격을 설정합니다. + 기본값: 0.1000 |
차원 1 오름차순 배열 |
파라미터 설명: 선택한 후, 포즈가 차원 1의 값에 따라 작은 것부터 큰 것 순으로 배열됩니다. + 기본값: 선택함. |
차원 2 오름차순 배열 |
파라미터 설명: 선택한 후, 각 레이어 내에서 포즈가 차원 2의 값에 따라 작은 것부터 큰 것 순으로 배열됩니다. + 기본값: 선택함. |
선택한 좌표계에서 포인트 클라우드 표시 |
파라미터 설명: 이 파라미터는 포인트 클라우드를 표시할 좌표계를 선택하는 데 사용됩니다. + 값 리스트: 로봇 좌표계, 카메라 좌표계. + 기본값: 로봇 좌표계. + 조정 설명: 실제 상황에 따라 이 파라미터를 선택해야 합니다. |