윤곽으로부터 경로 생성
|
이 스텝을 사용하려면 메뉴 바에서 창에서 "step_trajectory" 플러그인을 선택합니다. |
응용 시나리오
이 스텝은 일반적으로 직사각형 도어, 유리 등의 물체 가장자리에 도포하는 응용에서 사용됩니다.
실제 적용 과정에서는 촬영 각도, 조명 등의 요인으로 인해 포인트 클라우드가 완전히 표시되지 않거나 잡점이 많을 수 있으며, 이로 인해 생성된 경로의 시작점이 변하거나 이상적인 경로에서 벗어날 수 있습니다. 따라서 이 스텝은 경로 생성의 보조 도구로 사용하는 것을 권장합니다.
동일 유형의 물체에 대해서는 다음 단계에 따라 안정적인 경로를 얻을 수 있습니다.
-
물체 포인트 클라우드과 이 스텝을 사용해 초기 경로를 생성하고, 경로점을 조정합니다.
-
물체 포인트 클라우드를 포인트 클라우드 템플릿으로 사용하고, 조정된 경로점을 포인트 클라우드 템플릿의 여러 그립 포인트로 사용하며, 포인트 클라우드 템플릿에서 대상 물체 중심점을 설정합니다.
-
포인트 클라우드 템플릿과 대상 물체 중심점을 이용해 물체에 대해 3D 매칭을 수행하여 물체의 그립 포인트를 얻고, 이후 "다중 그립 포인트로 매핑" 스텝을 사용해 물체의 여러 그립 포인트를 얻음으로써 안정적인 경로를 획득합니다.
파라미터 설명
일반 설정
| 파라미터 | 설명 |
|---|---|
마스크 닫기 연산 시 커널 크기 |
파라미터 설명: 이미지 마스크에 대해 닫기 연산을 수행할 때, 이 파라미터는 연산 커널의 크기를 설정하는 데 사용되며 단위는 픽셀(px)입니다. 기본값: 5 px |
경로점 간격 |
파라미터 설명: 생성되는 경로점 간격을 설정하는 데 사용되며 단위는 픽셀(px)입니다. 값이 클수록 생성되는 경로점 간격이 커지고, 값이 작을수록 간격이 작아집니다. 구체적인 효과는 조정 예시를 참조하십시오. 기본값: 10 px |
가장자리 스케일링 유형 |
파라미터 설명: 경로점을 생성할 때 포인트 클라우드 가장자리의 스케일링 유형을 선택하는 데 사용됩니다. 값 목록: 침식, 가장자리 점 접선의 수직 방향으로 스케일링
기본값: 침식 조정 권장: 침식 스케일링 유형을 권장합니다. |
침식 연산 커널 크기 |
파라미터 설명: 가장자리 스케일링 유형이 침식일 때, 이 파라미터는 경로 스케일링의 크기와 방향을 설정하는 데 사용되며 단위는 픽셀(px)입니다. 값이 양수이면 경로가 대상 물체 가장자리 안쪽으로 수축하고, 값이 클수록 더 많이 수축합니다. 값이 음수이면 경로가 대상 물체 가장자리 바깥쪽으로 확장되고, 값이 작을수록 더 많이 확장합니다. 구체적인 효과는 조정 예시를 참조하십시오. 기본값: 15px |
수직 이동 거리 |
파라미터 설명: 가장자리 스케일링 유형이 가장자리 점 접선의 수직 방향으로 스케일링일 때, 이 파라미터는 스케일링의 크기와 방향을 설정하는 데 사용되며 단위는 밀리미터(mm)입니다. 값이 양수이면 경로가 대상 물체 가장자리 안쪽으로 수축하고, 값이 클수록 더 많이 수축합니다. 값이 음수이면 경로가 대상 물체 가장자리 바깥쪽으로 확장되고, 값이 작을수록 더 많이 확장합니다. 구체적인 효과는 조정 예시를 참조하십시오. 기본값: 8.000 mm |
가장자리 점 평활화 설정
| 파라미터 | 설명 |
|---|---|
가우시안 필터 사용 |
파라미터 설명: 가장자리 포인트 클라우드가 톱니 모양일 때, 가우시안 필터를 사용해 가장자리 포인트 클라우드를 평활화할지 여부를 결정하는 데 사용됩니다. 기본값: 선택 안 함 조정 권장: 실제 상황과 요구에 따라 설정하십시오. |
가우시안 필터 반지름 |
파라미터 설명: 가우시안 필터 사용 시 필터 반지름을 설정하며 단위는 픽셀(px)입니다. 기본값: 20 px 조정 권장: 기본값 사용을 권장합니다. |
가우시안 필터 Sigma 값 |
파라미터 설명: 가우시안 필터 사용 시 Sigma 값을 설정합니다. 기본값: 5.0000 조정 권장: 기본값 사용을 권장합니다. |
특수 침식 설정
이 그룹의 파라미터는 특수 프로젝트에만 사용되며, 일반적으로는 조정할 필요가 없습니다.
| 파라미터 | 설명 |
|---|---|
특수 침식 사용 |
파라미터 설명: 특수 에지 침식 처리 활성화 여부를 제어하는 데 사용됩니다. 기본값: 선택 안 함 |
접선 거리 계산 간격 |
파라미터 설명: 접선 거리 계산 시 사용할 간격을 설정하는 데 사용됩니다. 기본값: 4 |
특수 침식 실제 거리 |
파라미터 설명: 특수 에지 침식의 실제 처리 거리를 설정하는 데 사용되며 단위는 밀리미터(mm)입니다. 기본값: 8.000 mm |
코너점 검출
| 파라미터 | 설명 |
|---|---|
가장자리 포인트 클라우드 다운샘플링 계수 |
파라미터 설명: 대상 물체 가장자리 포인트 클라우드를 다운샘플링할 때의 계수를 설정하며 단위는 픽셀(px)입니다. 대상 물체 가장자리 포인트 클라우드를 다운샘플링하면 코너점을 더 잘 검출하는 데 도움이 됩니다. 기본값: 3 |
품질 수준 |
파라미터 설명: 물체 코너점을 검출하여, 경로점 간격을 어떻게 조정하더라도 가장자리의 꺾이는 지점에 반드시 경로점이 존재하도록 보장합니다. 기본값: 0.0100 조정 권장: 기본값 사용을 권장합니다. |
코너점 간 최소 픽셀 수 |
파라미터 설명: 코너점 검출 시 코너점 사이의 최소 픽셀 수를 설정하는 데 사용됩니다. 기본값: 50.0000 |
최대 코너점 수 |
파라미터 설명: 해당 물체 가장자리에 존재할 수 있는 최대 코너점 수를 설정하는 데 사용됩니다. 기본값: 4 |
검출 영역 크기 |
파라미터 설명: 대상 물체 포인트 클라우드 가장자리에서 상대적으로 덜 뚜렷한 코너점을 검출하는 데 사용됩니다. 포인트 클라우드 가장자리가 더 매끄러울수록 이 파라미터를 적절히 키울 수 있습니다. 기본값: 10 |
Harris 검출 방법 사용 |
파라미터 설명: Harris 검출 방법을 사용해 코너점을 검출할지 결정하는 데 사용됩니다. 이 파라미터를 선택하면 K 값을 설정해야 합니다. 기본값: 선택 안 함 조정 권장: 일반적으로는 이 방법을 사용할 필요가 없습니다. |
조정 예시
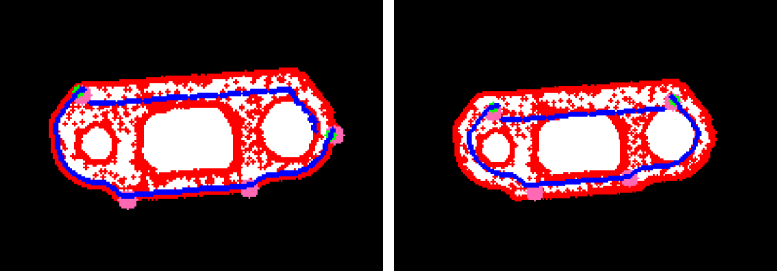
경로점 간격
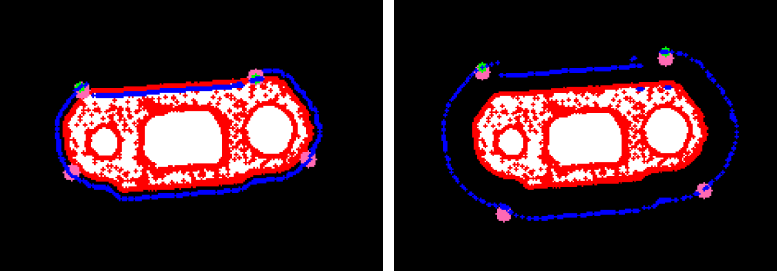
경로점 간격을 각각 20과 5로 설정했을 때, 이 스텝이 생성한 경로점은 아래 그림과 같습니다.
왼쪽 그림은 경로점 간격이 20일 때로, 경로점이 비교적 성기고, 오른쪽 그림은 5일 때로, 경로점이 더 촘촘합니다.