포인트 클라우드의 크기에 따라 분류하기
기능 설명
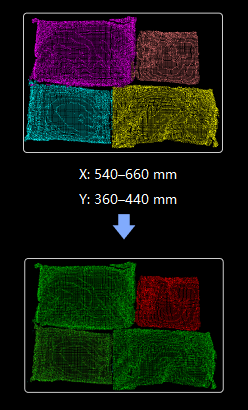
이 스텝에서는 참조 크기를 기반으로 입력된 포인트 클라우드의 적합 여부를 판단할 수 있습니다. 입력 포인트 클라우드의 크기와 참조 크기의 편차가 임계값 범위 내에 있다면 이 포인트 클라우드는 합격한 포인트 클라우드이고 반대로 불합격 포인트 클라우드가 될 것입니다.
응용 시나리오
이 스텝은 일반적으로 포대 디팔레타이징 시나리오에 사용됩니다. 딥 러닝 인식 과정에서 포대 인식 편차를 방지하기 위해, 본 스텝에서는 선행 스텝에서 인식된 포대 포인트 클라우드의 유효 여부를 판단함으로써 오류 방지 메커니즘을 추가합니다.
이 스텝은 일반적으로 마스크안에 대응하는 포인트 클라우드를 추출하기, 가장 높은 층의 포인트 클라우드를 획득하기 등 스텝과 함께 사용됩니다.
입력 및 출력
입력
| 입력 포트 | 데이터 유형 | 설명 |
|---|---|---|
포인트 클라우드 |
PointCloud/XYZNormal[] |
이 포트에 입력된 포인트 클라우드가 판단됩니다. |
참조 크기 |
Size3D[] |
물체의 참조 크기. |
형상 정보 |
Shape3D[] - |
각 포인트 클라우드에 대응하는 형상 정보 목록. |
분류 레이블 |
String[] - |
입력 포인트 클라우드의 레이블 목록. |
점수 |
Number[] - |
포인트 클라우드에 해당하는 신뢰도. |
포인트 클라우드 높이 |
Number[] - |
입력 포인트 클라우드의 높이. 이 포트가 활성화되지 않은 경우 포인트 클라우드 높이는 포인트 클라우드 중심의 Z 값에서 참조 높이를 뺀 값과 같습니다. |
출력
| 출력 포트 | 데이터 유형 | 설명 |
|---|---|---|
합격 포인트 클라우드 |
PointCloud/XYZNormal[] |
합격한 포인트 클라우드. |
불합격 포인트 클라우드 |
PointCloud/XYZNormal[] |
불합격한 포인트 클라우드. |
형상 정보 |
Shape3D[] |
합격 포인트 클라우드의 형상 정보. |
분류 레이블 |
String[] |
합격 포인트 클라우드의 레이블. |
점수 |
Number[] |
합격 포인트 클라우드의 점수. |
형상 정보 |
Shape3D[] |
불합격 포인트 클라우드의 형상 정보. |
분류 레이블 |
String[] |
불합격 포인트 클라우드의 레이블. |
점수 |
Number[] |
불합격 포인트 클라우드의 점수. |
시각화 컬러 포인트 클라우드 |
PointCloud/XYZRGB |
시각화된 컬러 포인트 클라우드. |
파라미터 설명
길이 차이의 임계값 설정
|
길이 차이 = 포인트 클라우드 길이 - 참조 길이 편차 비율 = 길이 차이 / 참조 길이 |
| 파라미터 | 설명 | ||
|---|---|---|---|
비율 하한 임계값/비율 상한 임계값 |
파라미터 설명: 이 파라미터는 참조 길이에 대한 포인트 클라우드 길이의 허용 편차 비율을 설정하는 데 사용됩니다. 편차 비율은 비율 하한 임계값과 비율 상한 임계값 사이에 있다면 포인트 클라우드는 합격한 포인트 클라우드이고 반대로 불합격 포인트 클라우드가 될 것입니다. 기본값: -0.2500 / 0.2500 값 범위: -1~0 / 0~1 조정 제안: 실제 상황에 따라 이 파라미터를 설정해야 합니다. 임계값의 절대값이 클수록 포인트 클라우드 크기에 허용되는 변동 범위가 커집니다.
|
너비 차이의 임계값 설정
|
너비 차이 = 포인트 클라우드 너비 - 참조 너비 편차 비율 = 너비 차이 / 참조 너비 |
| 파라미터 | 설명 | ||
|---|---|---|---|
비율 하한 임계값/비율 상한 임계값 |
파라미터 설명: 이 파라미터는 참조 너비에 대한 포인트 클라우드 너비의 허용 편차 비율을 설정하는 데 사용됩니다. 편차 비율은 비율 하한 임계값과 비율 상한 임계값 사이에 있다면 포인트 클라우드는 합격한 포인트 클라우드이고 반대로 불합격 포인트 클라우드가 될 것입니다. 기본값: -0.2500 / 0.2500 값 범위: -1~0 / 0~1 조정 제안: 실제 상황에 따라 이 파라미터를 설정해야 합니다. 임계값의 절대값이 클수록 포인트 클라우드 크기에 허용되는 변동 범위가 커집니다.
|
높이 차이의 임계값 설정
|
높이 차이 = 포인트 클라우드 높이 - 참조 높이 편차 비율 = 높이 차이 / 참조 높이 |
| 파라미터 | 설명 | ||
|---|---|---|---|
비율 하한 임계값/비율 상한 임계값 |
파라미터 설명: 이 파라미터는 참조 높이에 대한 포인트 클라우드 높이의 허용 편차 비율을 설정하는 데 사용됩니다. 편차 비율은 비율 하한 임계값과 비율 상한 임계값 사이에 있다면 포인트 클라우드는 합격한 포인트 클라우드이고 반대로 불합격 포인트 클라우드가 될 것입니다. 기본값: -100.0000 / 100.0000 조정 제안: 실제 상황에 따라 이 파라미터를 설정해야 합니다. 임계값의 절대값이 클수록 포인트 클라우드 크기에 허용되는 변동 범위가 커집니다. |
||
참조 높이 |
파라미터 설명: 이 파라미터는 기준 높이를 지정하는 데 사용되며 단위는 밀리미터(mm)입니다. 이 파라미터는 '포인트 클라우드 높이' 포트가 연결되지 않은 경우에만 유효합니다. 입력된 포인트 클라우드 높이가 비어 있는 경우 포인트 클라우드 높이 = 포인트 클라우드 포즈의 Z 값 − 참조 높이. 기본값: 1000.000 조정 제안: 실제 상황에 따라 이 파라미터를 설정해야 합니다.
|
종횡비 설정
|
종횡비 = 포인트 클라우드 길이 / 포인트 클라우드 너비 |
| 파라미터 | 설명 | ||
|---|---|---|---|
치수 종횡비 임계값 |
파라미터 설명: 이 파라미터는 포인트 클라우드 종횡비 허용 범위를 설정하는 데 사용됩니다. 기본값: 1000000.0000 조정 제안: 실제 상황에 따라 이 파라미터를 설정해야 합니다.
|