피킹 시뮬레이션 말단장치
본 문서는 피킹 시뮬레이션 말단장치 및 그 사용 방법을 소개합니다.
기능 소개
피킹 시뮬레이션 말단장치는 Mech-Viz에 내장된 시뮬레이션 말단장치로, 가상 환경에서 로봇 파지 방안을 검증하는 데 사용되며, 주로 가상 장면 생성과 파지 검증의 두 가지 기능을 포함합니다.
이 말단장치는 캐리어, 대상 물체, 카메라를 포함한 시뮬레이션 장면 구성을 지원하며, 대상 물체 인식부터 파지까지의 전체 과정을 모의하여 로봇의 대상 물체 파지 도달 가능성, 파지 안정성, 피킹 성공률 및 충돌 방지 효과 등을 검증합니다. 또한 잠재적인 충돌, 미파지 등의 위험을 사전에 발견하여, 파지 방안이 현장 디버깅 전에 위험 점검과 전략 최적화를 완료할 수 있도록 지원합니다.
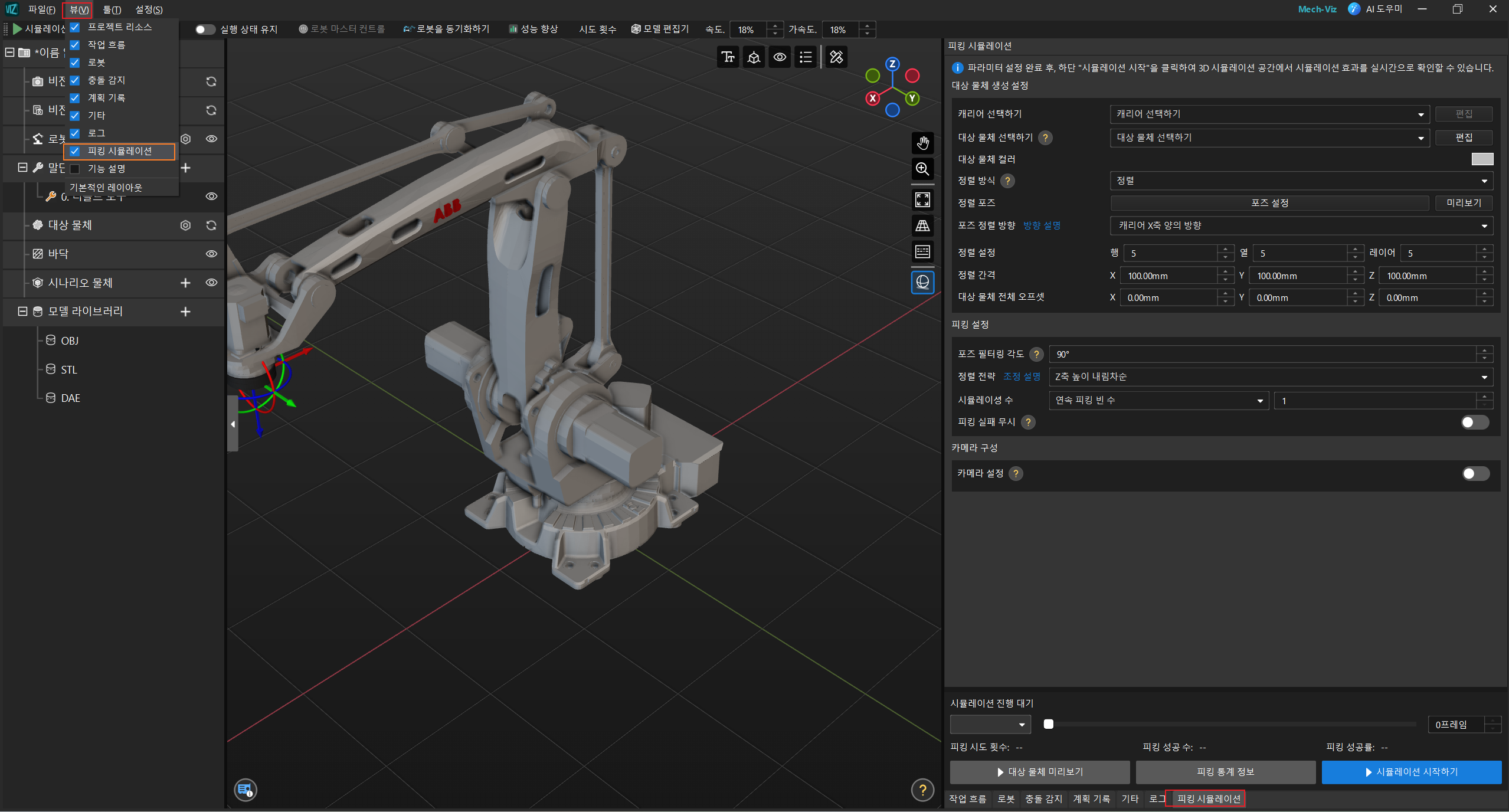
| Mech-Viz를 연 후 기능 패널은 일반적으로 기본적으로 피킹 시뮬레이션 화면으로 표시되며, 바로 구성을 시작할 수 있습니다. 해당 화면이 표시되지 않으면 상단 메뉴 바에서 뷰를 클릭하고, 피킹 시뮬레이션을 체크합니다. |
사용 방법
이 도구의 구체적인 사용 프로세스는 다음과 같습니다:

-
레이아웃 시뮬레이션: 가상 환경에서 파지에 필요한 대상 물체 배치 장면을 생성합니다. 캐리어, 대상 물체 수량, 대상 물체 배치 방식 및 자세 등을 유연하게 설정하여, 시뮬레이션 장면이 실제 생산 조건에 밀접하게 부합하도록 하고 다양한 대상 물체 배치 요구를 충족합니다.
-
피킹 설정: 생성된 대상 물체 장면을 기반으로 파지 전략을 구성하고, 파지 필터링 조건과 정렬 규칙을 합리적으로 설정하여 로봇 파지의 성공률과 안정성을 높입니다. 또한, 피킹에 실패한 대상 물체를 유연하게 처리하여 전체 파지 절차를 최적화할 수 있습니다.
-
카메라 배치(선택 사항): 시뮬레이션 장면에서 카메라를 배치하거나 카메라 모델을 가져와, 카메라 시야가 대상 물체 장면 워크스테이션을 적절히 커버하는지 확인하고 카메라 충돌 감지를 수행합니다. 또한 시뮬레이션 과정에서 카메라가 수집한 이미지 데이터를 저장하여, 후속 비전 인식 절차 디버깅에 사용할 수 있습니다.
-
시뮬레이션 검증: 현재 장면과 전략 설정을 기반으로 파지 시뮬레이션을 실행하고, 파지 과정을 통계 분석하여 방안의 잠재적 문제를 발견하고 최적화합니다.