궤적 조정
궤적 병합
로봇이 여러 궤적에서 연속적으로 운동해야 하며, 대상 물체 표면을 떠나지 않고 말단장치를 전환할 필요가 없는 경우, 궤적 병합 방법을 통해 여러 궤적을 병합할 수 있습니다.
궤적 병합 기능은 여러 개의 끝과 끝이 연결된 궤적을 하나의 연속된 궤적으로 병합하여, 로봇이 작업 중 대상 물체 표면을 떠나지 않고 연속적으로 운동할 수 있도록 합니다.
-
궤적 생성
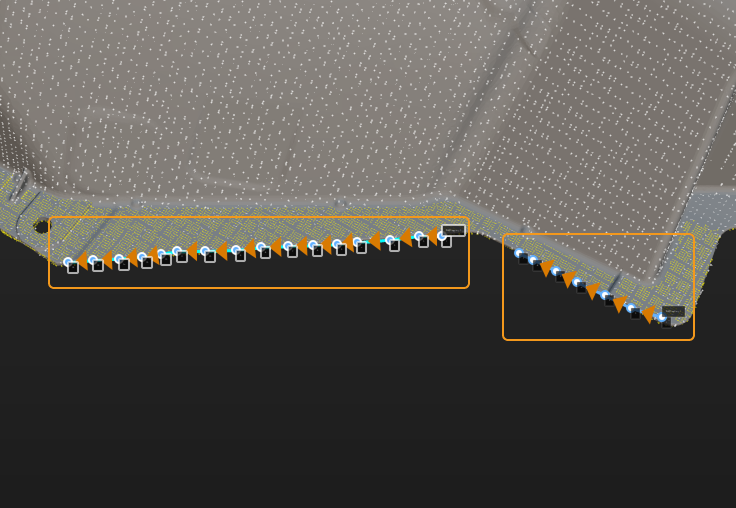
대상 물체에 최소 두 개 이상의 궤적이 존재하는지 확인하십시오. 아래 그림과 같습니다.
-
궤적 병합
‘궤적 라인 리스트’ 에서 임의의 궤적을 선택하고 궤적 병합 버튼을 클릭한 다음 병합하려는 궤적을 선택하고 마지막으로 응용버튼을 클릭하면 두 궤적을 병합할 수 있습니다.
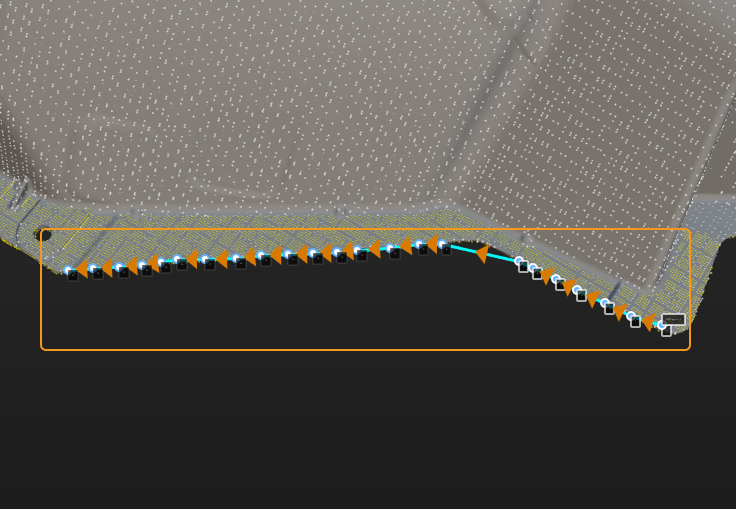
궤적 병합 시 각 궤적은 끝과 끝이 연결되어 하나의 궤적으로 병합됩니다. 아래 그림과 같습니다.
궤적 포인트 추가
궤적 포인트 작업 방법은 다음과 같습니다.
-
궤적 라인 리스트에서 특정 궤적 포인트를 선택합니다.
-
궤적 포인트 오른쪽의
 버튼을 클릭한 후 바로 가기 메뉴에서 궤적 포인트 추가를 선택하면 선택한 궤적 포인트 뒤에 새로운 궤적 포인트가 추가됩니다.
버튼을 클릭한 후 바로 가기 메뉴에서 궤적 포인트 추가를 선택하면 선택한 궤적 포인트 뒤에 새로운 궤적 포인트가 추가됩니다.
궤적 라인 분할
궤적 라인 분할 작업 방법은 다음과 같습니다.
-
궤적 라인 리스트에서 특정 궤적 포인트를 선택합니다.
-
궤적 포인트 오른쪽의
버튼을 클릭한 후 바로 가기 메뉴에서 궤적 라인 분할을 선택하면 선택한 궤적 포인트에서 궤적 라인 분할이 시작됩니다. 해당 궤적 포인트및 이후의 다른 궤적 포인트는 새로운 궤적 라인으로 분할됩니다.
특정 궤적 포인트를 시작 포인트로 설정하고 순서를 변경하기
특정 궤적 포인트를 시작 포인트로 설정하고 순서를 변경하는 작업 방법은 다음과 같습니다.
-
궤적 라인 리스트에서 특정 궤적 포인트를 선택합니다.
-
궤적 포인트 오른쪽의
버튼을 클릭한 후 바로 가기 메뉴에서 시작 포인트로 설정하고 순서를 변경하기를 선택하면 선택한 궤적 포인트가 궤적 라인의 시작점으로 설정되며, 해당 궤적 포인트 이전의 다른 점들은 궤적 라인의 끝으로 배치됩니다.