포즈를 포인트 클라우드의 표면으로 조정하기
파라미터 설명
시각화 설정
| 파라미터 | 설명 |
|---|---|
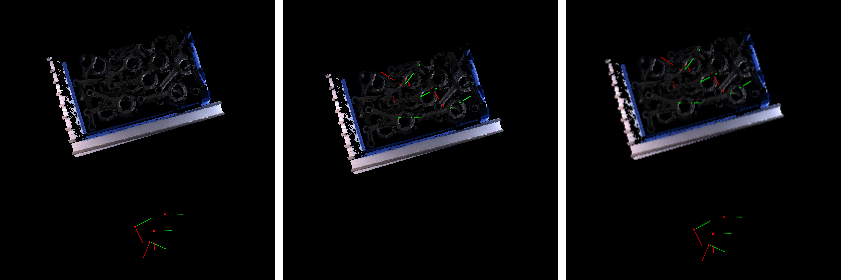
포즈 시각화 설정 |
파라미터 설명: 이 파라미터는 포즈의 시각화 형식을 설정하는 데 사용됩니다. 기본값: 출력한 포즈만 표시하기 값 리스트: 입력한 포즈만 표시하기, 출력한 포즈만 표시하기, 입력 및 출력한 포즈를 모두 표시하기 조정 설명: 실제 필요에 따라 드롭다운 목록에서 적절한 포즈 표시 설정을 선택합니다. 특정 효과에 대한 내용은 조정 예시를 참조하십시오. |
입력 사용 설정
| 파라미터 | 설명 |
|---|---|
대응 유형 |
파라미터 설명: 이 파라미터는 입력 포인트 클라우드와 입력 포즈 사이의 대응 관계를 지정하는 데 사용됩니다. 값 리스트:
기본값: OneToOne |
좌표계 설정
| 파라미터 | 설명 |
|---|---|
좌표계 유형 |
파라미터 설명: 이 파라미터는 포즈 조정 시 사용할 좌표계를 지정하는 데 사용됩니다. 값 리스트:
기본값: 대상 물체 좌표계 |
포인트 클라우드 추출 방법 설정
| 파라미터 | 설명 |
|---|---|
포인트 클라우드 추출 방법 |
파라미터 설명: 이 파라미터는 표면 포인트 클라우드를 추출하는 방법을 지정하는 데 사용됩니다. 값 리스트:
기본값: PointsInsideCylinder |