대상 물체 좌표계에서 행렬로 포즈를 회전하기
파라미터 설명
시각화 설정
| 파라미터 | 설명 | ||||
|---|---|---|---|---|---|
선택한 좌표계에서 포인트 클라우드를 표시하기 |
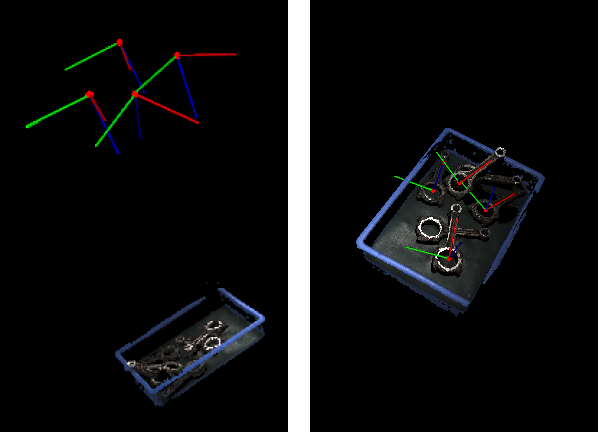
파라미터 설명: 로봇 또는 카메라 좌표계에서 포인트 클라우드를 표시합니다. 기본값: 로봇 좌표계 값 리스트: 로봇 좌표계, 카메라 좌표계 조정 설명: 카메라 좌표계를 선택할 때 디버그 출력 창에서 카메라 좌표계에서의 시각화 출력 결과를 표시합니다. 로봇 좌표계를 선택할 때 디버그 출력 창에서 로봇 좌표계에서의 시각화 출력 결과를 표시합니다. 특정 효과에 대한 내용은 조정 예시를 참조하십시오.
|
||||
포즈 시각화 설정 |
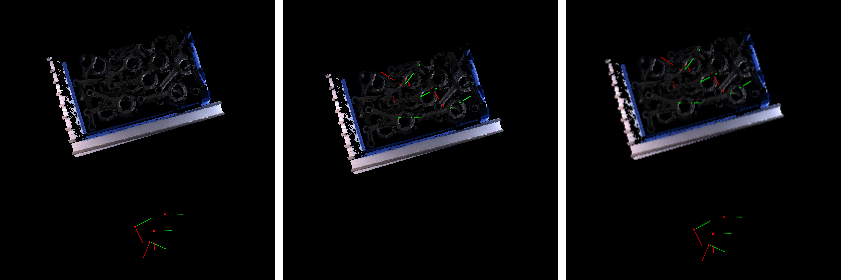
파라미터 설명: 이 파라미터는 포즈의 시각화 형식을 설정하는 데 사용됩니다. 기본값: 출력한 포즈만 표시하기 값 리스트: 입력한 포즈만 표시하기, 출력한 포즈만 표시하기, 입력 및 출력한 포즈를 모두 표시하기 조정 설명: 실제 필요에 따라 드롭다운 목록에서 적절한 포즈 표시 설정을 선택합니다. 특정 효과에 대한 내용은 조정 예시를 참조하십시오. |
| 파라미터 | 설명 |
|---|---|
변환 지정 |
파라미터 설명: 이 파라미터는 변환 행렬의 구체적인 수치를 설정하여 입력된 포즈에 이동 및 회전 변환을 수행합니다. 파라미터 형식: 「tx, ty, tz, qw, qx, qy, qz」의 형태로 표시되며, 앞의 세 수치는 이동량(mm)이고, 뒤의 네 수치는 쿼터니언 형식의 회전량입니다. 기본값: 0,0,0,1,0,0,0(이동 및 회전 없음을 의미함). 조정 설명: 실제 필요에 따라 각 구성 요소의 수치를 조정하여 원하는 포즈 변환 효과를 구현합니다. |