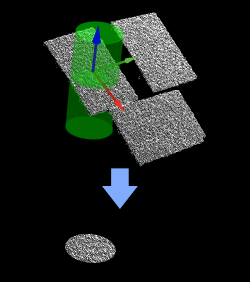
원기둥 범위 내의 포인트 클라우드를 추출하기
파라미터 설명
| 파라미터 | 설명 |
|---|---|
형태 유형 |
기본값: 속이 빈 원기둥. 값 리스트: 원기둥, 링, 섹터. 조절 설명: 다양한 시나리오의 필요에 따라 다양한 모양의 포인트 클라우드를 추출할 수 있습니다. 모양을 선택하면 지정된 모양 내의 3D 포인트 클라우드가 추출됩니다. |
Z 축 파라미터
| 파라미터 | 설명 | 그림 |
|---|---|---|
Z 값 하한 |
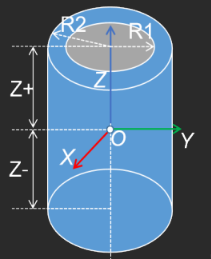
기본값: -100.000 mm 조절 설명: 이 하한은 Z축의 최소 좌표이며 아래 그림의 Z-에 해당합니다. 단위는 밀리미터(mm)입니다. |
|
Z 값 상한 |
기본값: 100.000 mm 조절 설명: 이 상한은 Z축의 최대 좌표이며 아래 그림의 Z+에 해당합니다. 단위는 밀리미터(mm)입니다. |
|
링과 부채꼴 반지름 파라미터
| 파라미터 | 설명 |
|---|---|
내부 원 반지름 |
기본값: 50.000 mm 조절 설명: XY 평면의 최소 거리는 위 그림의 R1에 해당합니다. 단위는 밀리미터(mm)입니다. 이 파라미터를 0으로 설정하면 원기둥을 얻을 수 있습니다. |
외부 원 반지름 |
기본값: 100.000 mm 조절 설명: XY 평면의 최대 거리는 위 그림의 R2에 해당합니다. 단위는 밀리미터(mm)입니다. |