2D 방법으로 포인트 클라우드의 에지를 추정하기
기능 설명
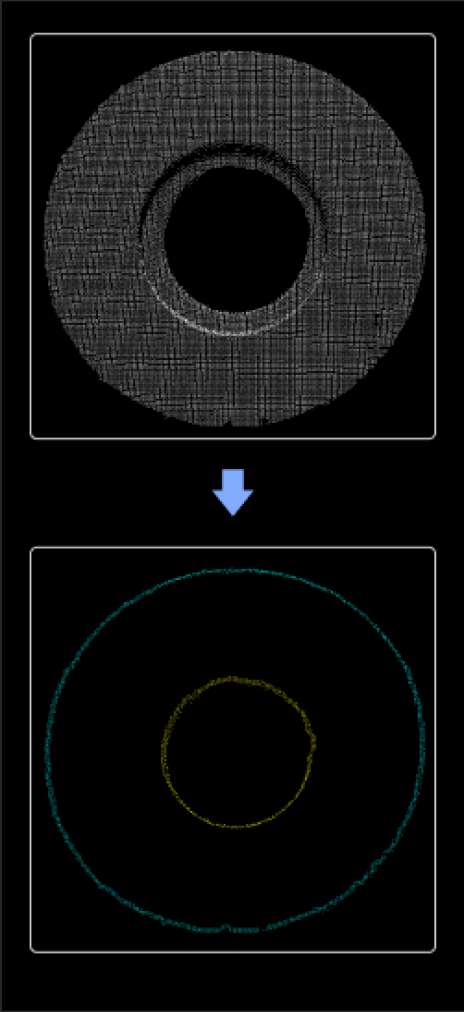
입력된 포인트 클라우드에서 포인트 클라우드의 에지를 추출합니다.
|
이 스텝은 입력된 3D 포인트 클라우드를 2D 이미지로 투영하여 해당 마스크를 생성한 후, 마스크에서 윤곽 감지 및 형태학적 처리를 수행합니다. 마지막으로 감지된 2D 윤곽을 3D 포인트 클라우드에 다시 매핑하여 포인트 클라우드 에지를 출력합니다. |
응용 시나리오
이 스텝은 일반적으로 평면 공작물을 로드하는 데 사용되며, 이를 통해 평면 공작물의 포인트 클라우드 가장자리를 획득할 수 있습니다. 이 스텝은 일반적으로 3D 매칭과 함께 사용됩니다. 이 스텝의 작업 속도는 3D 가장자리 추출 알고리즘보다 빠릅니다. 짧은 사이클 타임이 필요하고 3D 포인트 클라우드 간섭이 많으며, 대상 물체 포인트 클라우드의 가장 바깥쪽 가장자리 포인트만 추출해야 하는 프로젝트에 특히 적합합니다.
파라미터 설명
윤곽선 설정
| 파라미터 | 설명 |
|---|---|
2D 선폭 |
파라미터 설명: 이 파라미터는 마스크에서 윤곽선을 추출할 때의 선폭을 설정하는 데 사용됩니다. 값이 클수록 생성되는 2D 윤곽선이 두꺼워지며, 3D 포인트 클라우드 에지로 매핑된 후 포함되는 포인트 수가 많아집니다. 기본값: 3 px 조정 설명: 에지가 가는 경우 이 값을 줄이고, 에지가 불연속하거나 끊어지는 경우 이 값을 늘리는 것이 좋습니다. |
윤곽선 검색 방법 |
파라미터 설명: 이 파라미터는 윤곽선 검색 방식을 지정하여 에지 추출에 사용되는 윤곽선 범위 및 계층 구조를 결정합니다. 이를 통해 생성된 에지 포인트 클라우드의 완전성 및 윤곽선 구조에 영향을 미칩니다. 값 리스트: CV_RETR_EXTERNAL, CV_RETR_LIST, CV_RETR_CCOMP, CV_RETR_TREE
기본값: CV_RETR_EXTERNAL |
최소 길이 |
파라미터 설명: 이 파라미터는 마스크에서 유효한 윤곽선으로 인정되는 최소 픽셀 수를 설정하는 데 사용됩니다. 이 값보다 포인트 수가 많은 윤곽선만 유지됩니다. 기본값: 20 px 조정 설명: 작은 노이즈 포인트가 많을 경우 이 값을 늘리고, 더 작은 에지 세부 사항을 유지해야 할 경우 이 값을 줄이는 것이 좋습니다. |
동일 포인트 클라우드 내 윤곽선 병합 |
파라미터 설명: 이 파라미터는 동일한 포인트 클라우드에 속한 여러 윤곽선을 하나로 병합할지 여부를 설정하는 데 사용됩니다. 병합하면 에지 구조가 단순화되고, 병합하지 않으면 모든 독립 윤곽선이 유지됩니다. 기본값: 선택하지 않음 |
사용자 정의 윤곽선 계층 |
파라미터 설명: 이 파라미터는 추출할 윤곽선 계층을 지정하는 데 사용됩니다. "윤곽선 검색 방법"이 "CV_RETR_TREE"로 선택된 경우 이 파라미터를 설정해야 합니다. 계층 구조는 외부에서 내부로 증가합니다. 가장 외부 계층은 1이며, 0은 모든 계층, -1은 가장 내부 계층을 의미합니다. 기본값: 0 |