■ 현재 사용하고 있는 제품의 버전이 확실하지 않은 경우에는 언제든지 당사 기술 지원팀에 문의하시기 바랍니다.
이 스텝의 내용은 유지 보수 중입니다. 이 스텝에 대한 자세한 정보가 필요한 경우 Mech-Mind온라인 커뮤니티에서 문의하십시오.
기능 설명
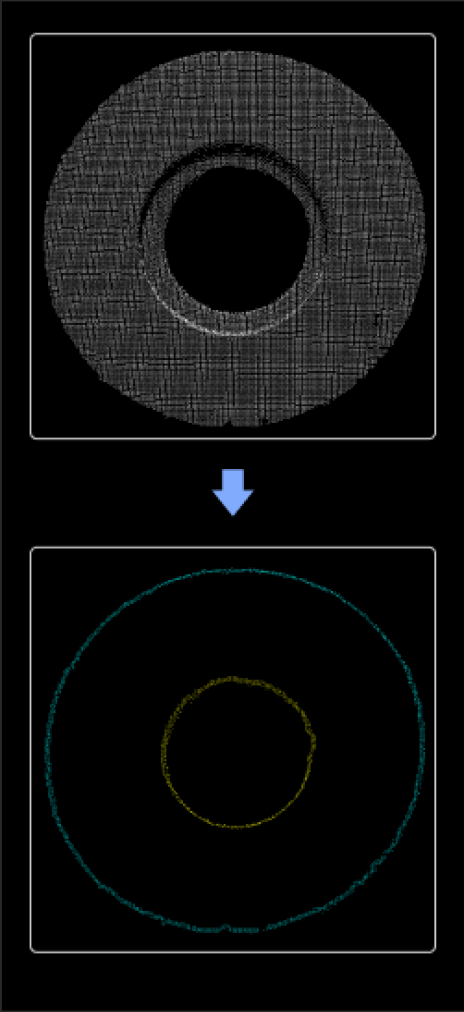
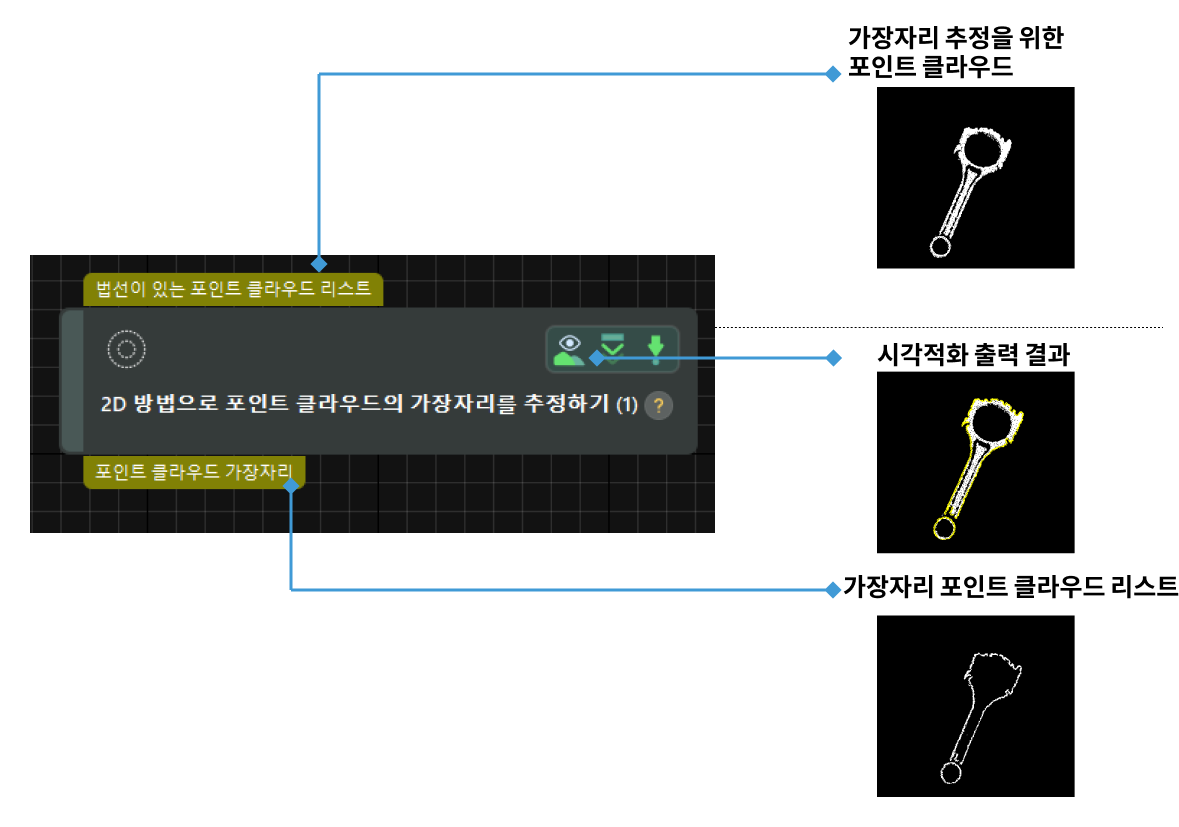
입력된 포인트 클라우드에서 포인트 클라우드의 에지를 추출합니다.
응용 시나리오
이 스텝은 일반적으로 평면 공작물을 로드하는 데 사용되며, 이를 통해 평면 공작물의 포인트 클라우드 가장자리를 획득할 수 있습니다. 이 스텝은 일반적으로 3D 매칭과 함께 사용됩니다.
이 스텝의 작업 속도는 3D 가장자리 추출 알고리즘보다 빠릅니다. 짧은 사이클 타임이 필요하고 3D 포인트 클라우드 간섭이 많으며, 대상 물체 포인트 클라우드의 가장 바깥쪽 가장자리 포인트만 추출해야 하는 프로젝트에 특히 적합합니다.