3D 방법을 사용하여 포인트 클라우드의 가장자리를 추정하기
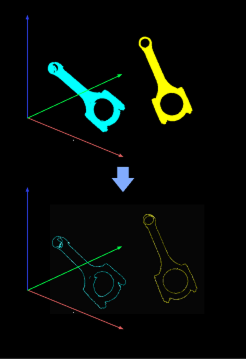
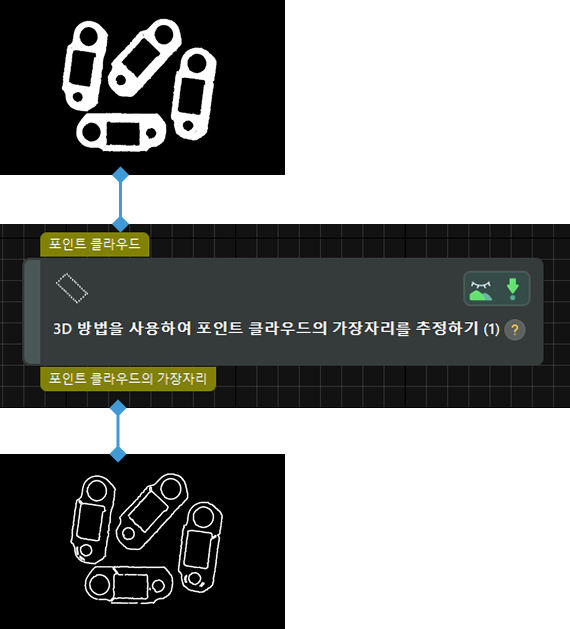
포인트 클라우드 가장자리 추출 프로세스
이 스텝이 포인트 클라우드의 가장자리를 추출하는 프로세스는 다음과 같습니다:
-
지정한 이웃점의 검색 방식을 사용하여 주어진 점 주변의 여러 인접 점을 검색하고, 그 점을 다른 점들과 연결합니다.
-
인접한 선들이 이루는 최대 각도를 설정된 각도 임계값과 비교합니다. 최대 각도가 각도 임계값을 초과하면, 해당 포인트를 가장자리 포인트로 간주합니다.
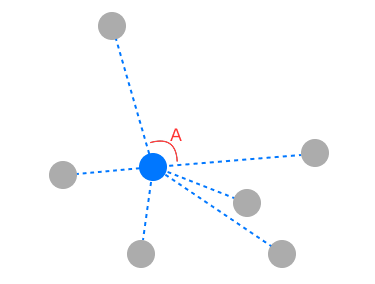
아래 그림과 같이, 파란색 포인트는 공간상의 한 포인트이고 회색 포인트들은 검색된 인접 포인트들입니다.
이 경우 각도 임계값은 90°로 설정됩니다. ∠A는 인접한 연결선들이 이루는 최대 각도이며, 만약 ∠A가 90°를 초과하면 파란색 포인트는 가장자리 포인트로 간주됩니다.
아래에서는 위 프로세스 관련 파라미터에 대해 소개하겠습니다.
파라미터
경계 추정 설정
- 각도 임계값
-
파라미터 설명: 이 파라미터는 특정 포인트가 가장자리 포인트인지 여부를 판단하는 데 사용됩니다. 한 포인트와 여러 검색된 포인트들 사이의 연결선 중 인접한 두 선이 이루는 최대 각도가 이 값을 초과하면, 해당 포인트는 가장자리 포인트로 간주됩니다.
기본 값: 90°
조정 권장: 기본값을 사용하는 것이 좋습니다.
이웃점의 검색 설정
- 이웃점의 검색 방식
-
파라미터 설명: 이 파라미터는 이웃점을 검색하는 방식을 선택하는 데 사용됩니다.
값 리스트: KNN, Radius
-
KNN: K 이웃 검색으로 공간에서 특정 점과 가장 가까운 K개의 점을 찾는 데 사용됩니다. 이 방법을 선택한 후 K 값을 결정하기 위해 이웃점의 수 파라미터를 설정해야 합니다. 기본값인 20을 권장합니다. 이 방법은 포인트 클라우드의 가장자리를 계산할 때 더 빠릅니다.
-
Radius: 반경 기반 이웃 검색으로 공간에서 특정 점으로부터 일정 반경 이내에 있는 점들을 찾는 데 사용됩니다. 이 방법을 선택한 후 검색 범위를 결정하기 위해 이웃점의 검색 반경 파라미터를 설정해야 합니다. 기본값인 5.000 mm를 사용하는 것이 좋습니다.
기본값: KNN
조정 권장: 기본값을 사용하는 것이 좋습니다.
-