특정 시나리오에서의 대상 물체 인식
이 섹션에서는 특정 시나리오에서 대상 물체 인식을 수행하는 방법에 대해 설명합니다.
로드 및 언로드 등의 시나리오의 대상 물체 인식
사용 가이드
-
대상 물체 편집기를 사용하여 대상 물체를 구성합니다.
대상 물체 유형에 따라 대상 물체 편집기 홈 페이지에서 "포인트 클라우드 모델 불필요" 제외한 다른 대상 물체 구성 프로세스를 선택하여 대상 물체 포인트 클라우드 모델을 생성합니다.
-
비전 프로젝트를 구성합니다.
-
3D 매칭 스텝 또는 3D 대상 물체 인식 도구를 사용하여 대상 물체를 인식합니다.
파라미터 조정 과정에서 대상 물체의 대칭성 또는 픽 포인트 수에 따라 스텝의 출력을 설정해야 합니다.
-
대상 물체가 여러 개의 픽 포인트를 가지고 있는 경우 픽 포인트 필터링을 수행해야 하므로, 이 스텝에서는 대상 물체의 픽 포인트를 출력해야 합니다.
-
대상 물체가 대칭성을 가진 경우 대상 물체 중심점의 방향을 조정해야 하므로, 이 스텝에서는 대상 물체 중심점을 출력해야 합니다.
-
-
포즈 조정 도구를 사용하여 대상 물체의 포즈를 조정합니다.
-
출력 스텝의 파라미터를 구성합니다.
파라미터 파라미터 값 포트 유형
사전 정의(비전 결과)
시나리오 선택
매칭
데이터 변환 방법
이 파라미터 값은 위의 b 스텝 출력과 일치해야 합니다.
-
만약 b 스텝에서 대상 물체의 픽 포인트를 출력했다면, "출력" 스텝의 "데이터 변환 방법"은 "픽 포인트에 따른 피킹 전략 생성"으로 설정됩니다.
-
만약 b 스텝에서 대상 물체 중심점을 출력했다면, "출력" 스텝의 "데이터 변환 방법"은 "대상 물체 중심점에 따른 피킹 전략 생성"으로 설정됩니다.
-
-
-
프로젝트를 실행하여 대상 물체 포즈를 출력합니다.
로드 및 언로드(파티션 또는 빈 포함됨) 시나리오에서의 대상 물체 인식
적용 시나리오
3D 매칭 방법을 사용하여 대상 물체를 인식해야 하며, 또한 평면 포인트 클라우드의 포즈와 크기를 계산하기 방법을 통해 파티션, 빈 등을 인식해야 합니다.
사용 가이드
-
대상 물체 편집기를 사용하여 대상 물체를 구성합니다.
-
대상 물체 편집기 홈 페이지에서 "포인트 클라우드 모델 불필요" 제외한 다른 대상 물체 구성 프로세스를 선택하여 대상 물체 포인트 클라우드 모델을 생성합니다.
-
“포인트 클라우드 모델 불필요” 대상 물체 구성 프로세스를 선택하고 파티션을 피킹하기에 필요한 대상 물체 정보를 구성합니다.
-
-
비전 프로젝트를 구성합니다.
-
여러 프로젝트가 있습니다.
솔루션에 대상 물체 인식, 파티션 인식 두 개의 프로젝트가 포함되어 있는 경우 파티션 인식 프로젝트는 다음과 같이 구성되어야 합니다.
스텝 파라미터 파라미터 값 출력
시나리오 선택
기타
포인트 클라우드 모델 필요 없는 물체
파티션에 해당하는 대상 물체 명칭
-
프로젝트가 하나만 있습니다.
한 프로젝트에서 대상 물체 인식, 파티션 인식을 동시에 진행할 경우 아래 그림과 같은 워크플로에 따라 프로젝트를 구축해야 합니다.
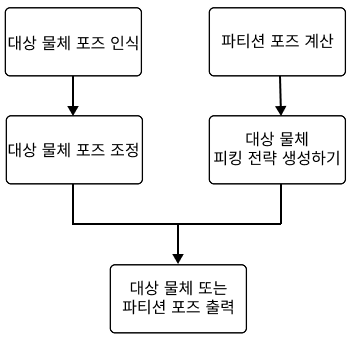
구축한 후의 프로젝트는 아래 그림과 같습니다.
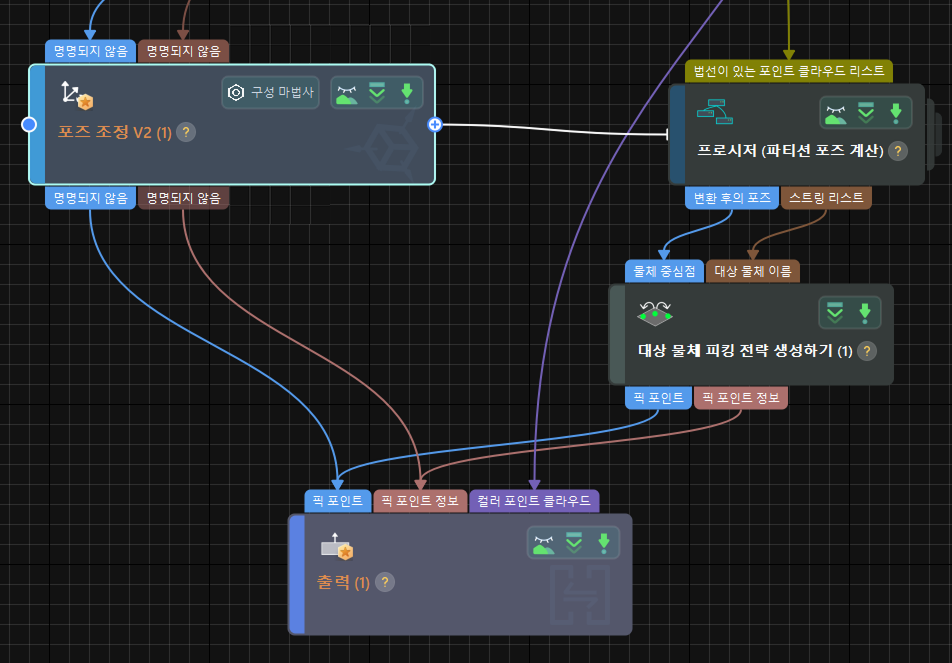
“대상 물체 피킹 전략 생성하기" 스텝의 입력은 대상 물체 편집기에서 "포인트 클라우드 모델 불필요" 프로세스를 통해 저장된 대상 물체의 이름이므로, 해당 스텝에 직접적으로 픽 포인트를 입력해야 하며, 스텝에 출력된 픽 포인트는 입력된 픽 포인트와 일치해야 합니다.
프로젝트를 구축한 후에는 프로젝트를 다음과 같이 구성해야 합니다.
스텝 파라미터 조정 설명 "3D 매칭" 스텝 또는 3D 대상 물체 인식 도구
신뢰도 임계값
인식 오류와 인식 결과 누락을 방지하려면 적절한 신뢰도 임계값을 설정해야 합니다.
파라미터를 기본값으로 설정하고 실행 결과를 확인하는 것이 좋습니다. 인식 오류가 발생하면 이 파라미터를 적당히 높이는 것을 건의합니다. 인식 결과 누락이 발생하면 파라미터를 적당히 낮추는 것이 좋습니다.포즈 조정 V2
출력이 없을 때 제어 흐름을 트리거하기
이 옵션을 선택함
출력이 없을 경우 계속 실행하기
이 옵션을 선택하지 않음
출력
포트 유형
사전 정의(비전 결과)
시나리오 선택
매칭
-
-
프로젝트를 실행하여 대상 물체 포즈를 출력합니다.
디팔레타이징 시나리오에서의 대상 물체 인식
적용 시나리오
디팔레타이징 시나리오에서 평면 포인트 클라우드의 포즈와 크기를 계산하기 방법을 통해 3D 매칭 방법을 사용하지 않고 대상 물체를 인식해야 합니다.
사용 가이드
-
대상 물체 편집기를 사용하여 대상 물체를 구성합니다.
대상 물체 유형에 따라 대상 물체 편집기 홈 페이지에서 "포인트 클라우드 모델 불필요" 대상 물체 구성 프로세스를 선택하여 상자, 포대 디팔레타이징에 필요한 대상 물체 정보를 구성합니다.
-
비전 프로젝트를 구성합니다.
-
3D 매칭가 아닌 방법으로 대상 물체를 인식합니다.
-
출력 스텝의 파라미터를 구성합니다.
파라미터 파라미터 값 포트 유형
사전 정의(비전 결과)
시나리오 선택
디팔레타이징
기타 입력
대상 물체 치수와 같은 기타 정보를 내보내려면 이 파라미터를 선택합니다. 선택하면 "출력" 스텝에 "대상 물체 치수" 등의 입력 포트가 추가될 것입니다.
-
-
프로젝트를 실행하여 대상 물체 포즈를 출력합니다.
임의의 물체 피킹 시나리오에서의 대상 물체 인식
적용 시나리오
임의의 물체 피킹 시나리오에서의 픽 포인트를 예측하기 방법을 통해 3D 매칭 방법을 사용하지 않고 대상 물체를 인식합니다.
사용 가이드
-
대상 물체 편집기를 사용하여 대상 물체를 구성합니다.
대상 물체 유형에 따라 대상 물체 편집기 홈 페이지에서 "포인트 클라우드 모델 불필요" 대상 물체 구성 프로세스를 선택하여 피킹에 필요한 대상 물체 정보를 구성합니다.
-
비전 프로젝트를 구성합니다.
-
"픽 포인트를 예측하기" 방법을 사용하여 대상 물체를 인식합니다.
-
출력 스텝의 파라미터를 구성합니다.
파라미터 파라미터 값 포트 유형
사전 정의(비전 결과)
시나리오 선택
기타
기타 입력
대상 물체 치수를 내보내려면 이 파라미터를 선택합니다. 선택하면 "출력" 스텝에 "대상 물체 치수" 등의 입력 포트가 추가될 것입니다.
-
-
프로젝트를 실행하여 대상 물체 포즈를 출력합니다.
외부 포인트 클라우드 모델을 통해 대상 물체 인식
적용 시나리오
포인트 클라우드 모델을 동적으로 생성해야 하는 시나리오에 적합합니다. 이 시나리오에서는 대상 물체 종류가 다양하여 대상 물체 편집기에서 포인트 클라우드 모델을 하나씩 만들 수 없으며, 대상 물체는 일반 3D shape입니다. 예를 들어 스텝으로 포인트 클라우드 모델을 생성하거나 STL 모델을 통해 포인트 클라우드 모델을 생성합니다.
사용 가이드
이 시나리오에서는 "3D 매칭" 스텝의 "외부 모델" 기능을 사용하여 "물체 모델을 만들기" 스텝에서 생성된 포인트 클라우드 모델을 읽은 다음 대상 물체 편집기를 통해 포인트 클라우드 모델을 제외한 다른 대상 물체 정보를 생성합니다. 구체적인 작업은 다음과 같습니다.
-
비전 프로젝트를 구성합니다.
-
3D 매칭 스텝을 추가하고 파라미터를 설정합니다.
파라미터 파라미터 값 파라미터 조정 레벨
"Advanced" 또는 "Expert"
입력 모드
외부 모델
-
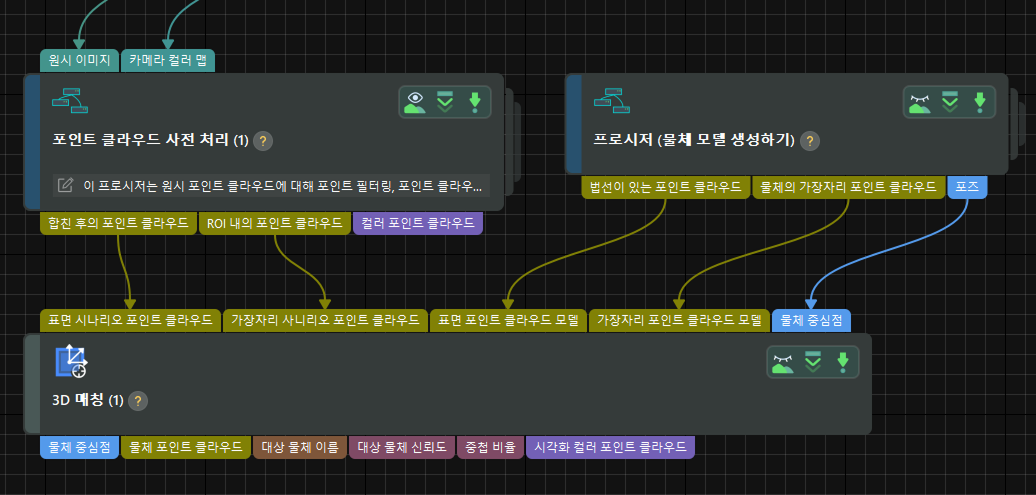
포인트 클라우드 모델을 생성하는 데 사용되는 스텝을 추가하고 연결합니다.
프로젝트에서 포인트 클라우드 모델을 생성하는 데 사용되는 스텝을 추가하고 연결합니다. 브레이크 디스크 포인트 클라우드 모델을 생성하는 경우 예로 들면 "물체 모델을 만들기" 스텝을 사용하여 브레이크 디스크 크기에 따라 포인트 클라우드 모델을 동적으로 생성할 수 있습니다.
-
"3D 매칭" 스텝에 외부 포인트 클라우드 모델을 입력합니다.
-
사전 처리된 표면 시나리오 포인트 클라우드, 가장자리 시나리오 포인트 클라우드를 각각 "3D 매칭" 스텝의 1, 2 입력 포트에 입력합니다.
-
생성된 대상 물체 표면 포인트 클라우드 모델, 가장자리 포인트 클라우드 모델 및 대상 물체 중심점을 각각 "3D 매칭" 스텝의 3, 4, 5 입력 포트에 입력합니다.
-
-
출력 스텝의 파라미터를 구성합니다.
파라미터 파라미터 값 포트 유형
사전 정의(비전 결과)
시나리오 선택
기타
-
-
대상 물체 편집기를 사용하여 다른 대상 물체 정보를 생성합니다.
대상 물체 유형에 따라 대상 물체 편집기 홈 페이지에서 "포인트 클라우드 모델 불필요" 대상 물체 구성 프로세스를 선택하여 포인트 클라우드 모델을 제외한 대상 물체 정보를 가져옵니다.
-
프로젝트를 실행하여 대상 물체 포즈를 출력합니다.