포즈의 반복 정밀도 검증
비전 프로젝트 구축이 완료되면 포즈의 반복 정밀도를 검증하여 프로젝트의 안정성을 확인할 수 있습니다.
검증 방법
프로젝트 인식의 반복 정밀도를 검증하려면 Mech-Vision 소프트웨어의 “통계 데이터를 통해 포즈의 반복 정밀도를 체크하기” 스텝을 사용해야 합니다.
검증 프로세스는 다음과 같습니다.
-
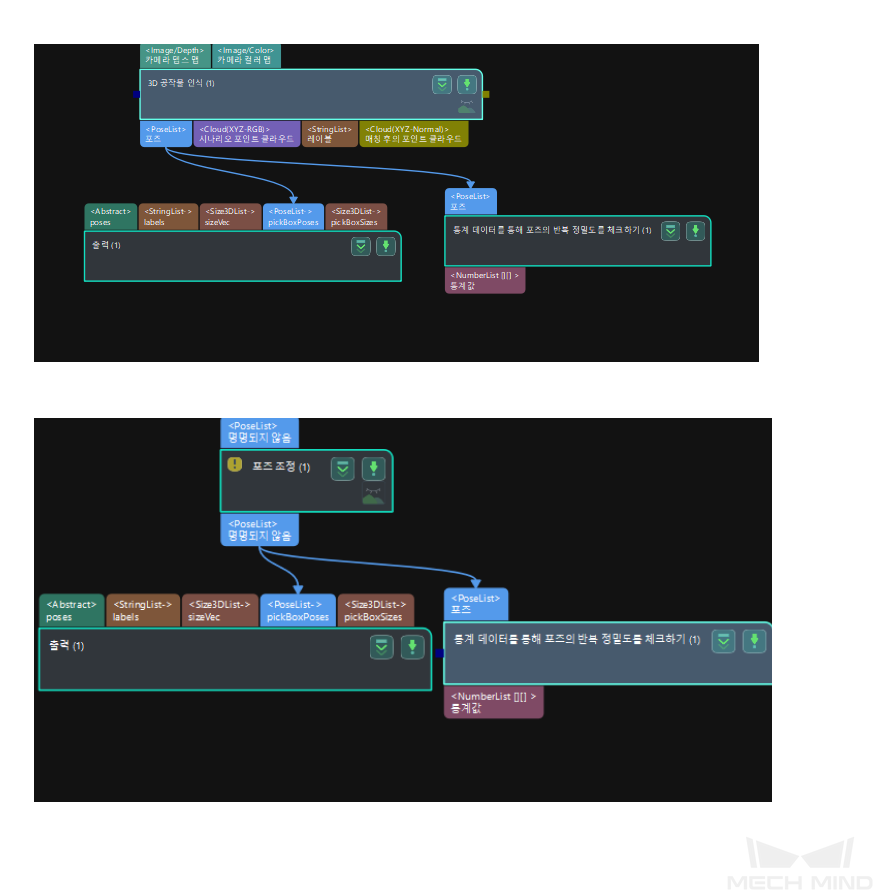
프로젝트에 "통계 데이터를 통해 포즈의 반복 정밀도를 체크하기" 스텝을 추가합니다.
이 스텝은 아래 그림과 같이 대상 물체의 포즈를 출력하는 스텝 후에 연결할 수 있습니다.
-
카메라 시야에 단일 공작물을 배치한 다음 프로젝트를 10-20회 수행하여 프로젝트에서 공작물의 출력 포즈를 획득 및 통계하고 포즈의 반복 정밀도를 분석합니다.
-
데이터 통계 파일을 열어 포즈의 반복 정밀도를 확인합니다.
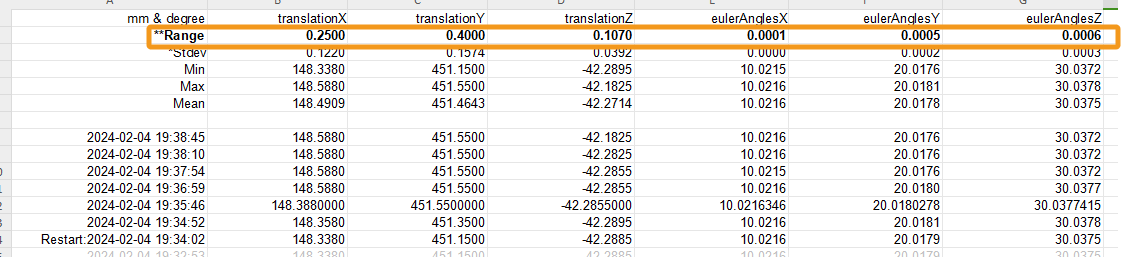
위 그림과 같이 테이블의 range(오차 범위) 행은 해당 위치에서 공작물의 포즈 반복 정밀도를 보여줍니다.
-
x축 좌표의 오차 범위는 약 ± 0.25mm입니다.
-
y축 좌표의 오차 범위는 약 ± 0.40mm입니다.
-
z축 좌표의 오차 범위는 약 ± 0.11mm입니다.
-
-
피킹 영역이 상대적으로 크거나 일부 영역의 피킹 효과가 불안정한 경우 여러 위치에서 동일한 공작물의 포즈 반복 정밀도를 통계해야 합니다.
깊은 트레이에서 대상물을 피킹해야 하는 시나리오의 경우, 다양한 높이와 위치에서 포즈 반복 정밀도를 통계해야 합니다. 예를 들어 빈 평면을 9개의 같은 영역으로 나눈 다음 다른 높이에서 반복 정밀도를 통계할 수 있습니다. 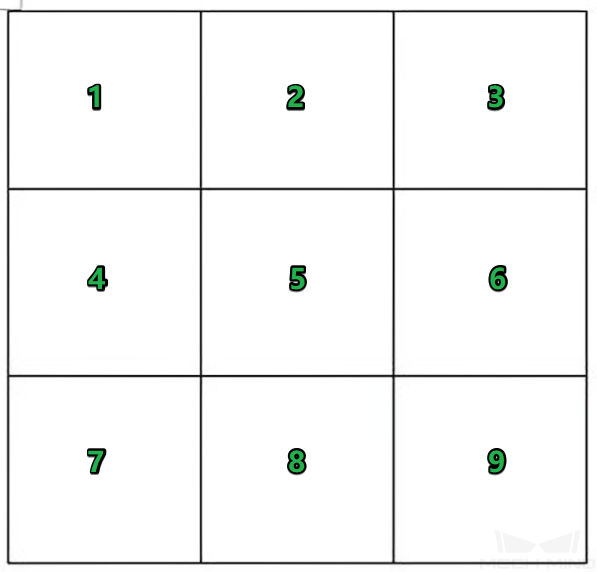
검증 표준
일반적으로 x/y/z축 좌표의 오차 범위는 ±0.5mm 이내로 프로젝트의 정확도 요구 사항을 충족할 수 있습니다.
고정확도 요구의 시나리오의 경우 x/y/z축 좌표의 오차 범위는 더 작아야 합니다(예: ±0.1mm). 통계로 얻은 오차 범위가 크면 프로젝트의 인식 정확도를 향상하십시오.