포즈 조정(높이)
이 튜토리얼에서는 먼저 포즈를 Z값으로 정렬하는 응용 시나리오와 예시 솔루션을 소개한 다음, 예시 솔루션 '포즈 조정(높이)'을 참조하여 포즈 조정 V2 스텝에서 파라미터를 조정하는 방법을 설명합니다. 또한 실제 애플리케이션에 대한 주의 사항도 제공합니다.
응용 시나리오
포즈 Z값에 따른 정렬은 대상 물체를 포즈 높이에 따라 정렬하고 피킹해야 하는 시나리오에 적합합니다. Z값이 더 높은 물체를 먼저 피킹하면 피킹 성공률을 향상시킬 수 있습니다.

응용 예시
링 로딩 예시를 들면, 이 섹션에서는 '포즈 조정(높이)' 예시 프로젝트를 사용하여 먼저 대상 물체 포즈의 Z값에 따라 정렬한 다음 피킹을 수행합니다.
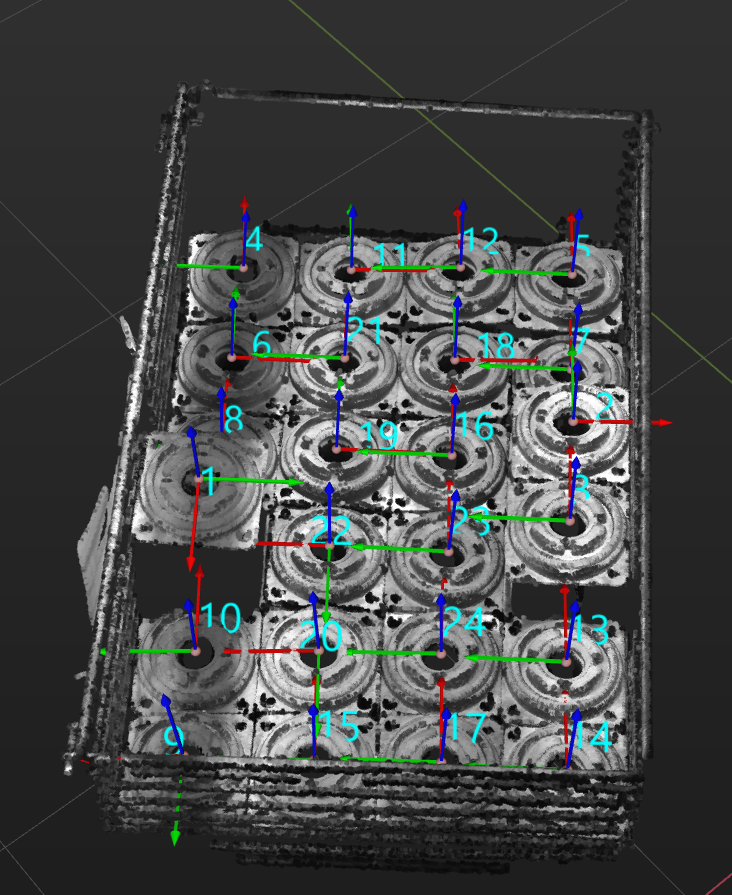
로봇은 아래와 같이 링을 피킹합니다.
이제 이 예시 솔루션을 바탕으로, 실제 응용 시의 작업 가이드와 주의 사항에 대해 설명하겠습니다.
응용 가이드
포즈를 Z값으로 정렬하는 적용 시나리오를 이해한 후, 솔루션 라이브러리에서서 관련 프로젝트를 다운로드하고 다음과 같은 방법으로 파라미터를 조정할 수 있습니다.
'포즈 조정(높이)' 프로젝트는 Mech-Vision 솔루션 라이브러리의 '실천 사례' - '3D 포즈 조정' 카테고리에서 다운로드하여 구축할 수 있습니다. 프로젝트가 생성된 후, 포즈 조정 V2 스텝을 클릭하고 구성 마법사 버튼을 클릭하여 포즈 조정 도구를 열어 파라미터 조정 방법을 확인하세요. 이 과정은 포즈 조정, 처리 규칙, 일반 설정의 세 가지 프로세스로 구성됩니다.

-
포즈 조정: 포즈 방향을 조정합니다.
-
포즈 규칙: 실제 필요에 따라 포즈를 정렬하고 요구 사항을 충족하지 않는 포즈를 필터링합니다.
-
일반 설정: 포즈 처리 이외의 작업을 설정할 수 있으며, 현재 포즈에 해당하는 다른 데이터(예: 상자 치수)의 재정렬을 지원합니다.
아래에서는 각 프로세스에서 조정해야 할 주요 파라미터를 소개합니다.
포즈 조정
-
물체 포즈의 방향을 조정하는 방식을 선택합니다.
Z축이 위를 향하도록 포즈를 자동으로 조정하려면 방향 조정 파라미터를 자동 정렬로 설정하는 것이 좋습니다.
기타 방향 조정 방법에 대한 설명은 포즈 방향 조정 내용을 참조하십시오.
-
응용 시나리오를 선택합니다.
정렬을 용이하게 하기 위해 포즈의 Z축 방향이 최대한 일치하도록 하려면 응용 시나리오를 Z축 정렬(머신 텐딩)로 설정해야 합니다.
포즈 조정 프로세스가 완료되면 다음 버튼을 클릭하여 '포즈 처리 규칙' 화면으로 들어갑니다.
포즈 규칙
포즈 정렬
-
포즈 정렬 유형을 선택합니다.
포즈의 X/Y/Z 값으로 정렬을 선택하세요.
-
포즈의 지정된 값을 설정합니다.
이 예시 프로젝트에서는 대상 물체를 포즈 높이에 따라 정렬하여 피킹하므로Z 좌표를 선택하십시오.
-
포즈 정렬 순서를 선택합니다.
대상 물체를 피킹할 때 포즈 높이가 높은 물체를 먼저 피킹해야 하므로 내림차순을 선택해야 합니다.
포즈 필터링
-
지정해야 하는 축을 선택합니다.
Z축을 선택하여 해당 축과 목표 방향 사이의 각도를 계산합니다.
-
목표 방향을 설정합니다.
로봇 좌표계를 선택하여 로봇 좌표계를 기준 포즈로 사용합니다.
-
방향을 선택합니다.
Z축의 정방향을 선택하세요.
-
최대 각도 차이를 설정합니다.
이 예시 프로젝트에서는 30°로 설정해야 합니다. 포즈의 지정된 축(Z축)과 목표 방향(로봇 좌표계) 사이의 각도가 30° 미만일 경우, 해당 포즈는 필터링되지 않고 유지됩니다.
| 작업 현장의 실제 수요에 따라 최대 각도의 값을 조정하세요. 대상 물체들이 수평면에 깔끔하게 배열되어 있는 경우에는 비교적 작은 값으로 설정하고, 대상 물체들이 무작위로 배치되어 있는 경우에는 값을 약간 높여도 됩니다. |
포즈 처리 규칙 구성이 완료되면 다음 버튼을 클릭하여 '일반 설정' 화면으로 들어갑니다.
주의 사항
실제 응용 시나리오에서는 다음 사항을 고려해야 하며, 이후 포즈 조정 V2 스텝을 추가하고 데이터 포트를 연결하여 포즈를 높이 기준으로 빠르게 정렬할 수 있습니다.
-
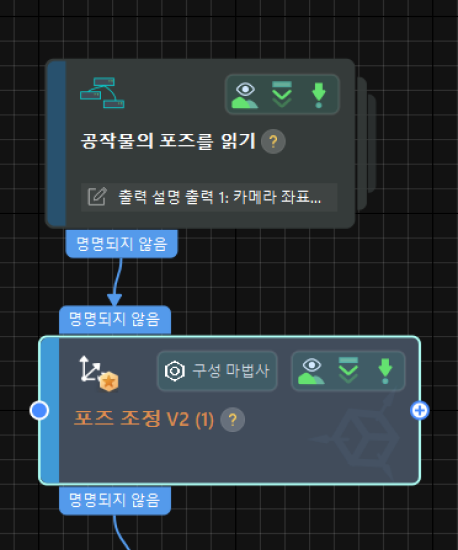
포즈 조정 V2 스텝 앞에 대상 물체를 인식하고 카메라 좌표계에서 정렬될 대상 물체의 중심점 포즈를 정상적으로 출력할 수 있는 스텝 또는 프로시저(예: 공작물의 포즈를 읽기)가 연결되어야 합니다. 이러한 스텝 또는 프로시저의 포즈 출력 포트는 포즈 정렬을 위해 포즈 조정 V2 스텝의 포즈 입력 포트에 연결됩니다.
-
조정된 후의 포즈를 출력하고 로봇이 포즈 높이에 따라 링을 피킹하도록 포즈 조정 V2 스텝 뒤에 경로 계획, 출력 등 포즈 입력용 스텝이 연결되어야 합니다.