로봇 절대 정확도 저하 여부 확인
이 부분에서는 로봇의 절대 정확도 저하 여부를 확인하는 방법을 소개합니다.
Mech-Vision에서는 로봇의 절대 정확도 문제를 신속하게 확인할 수 있도록 로봇 절대 정확도 검사 도구를 제공합니다.
메뉴 바에서 를 선택한 다음 오차 분석 인터페이스에서 를 선택합니다.
로봇 영점 손실 검사
검사 방법:
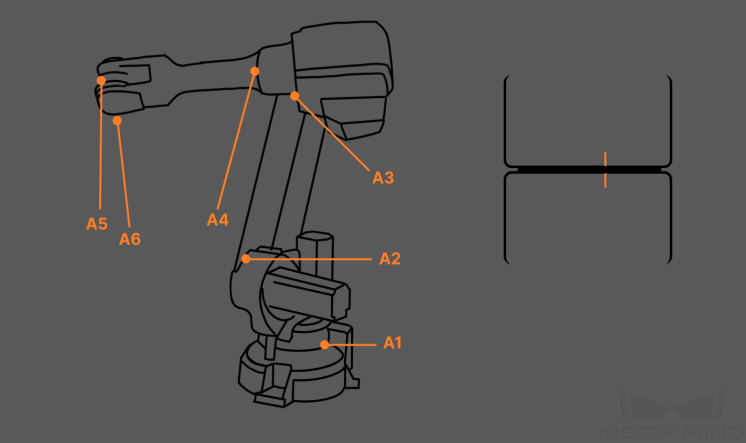
로봇을 표준 영점 위치로 복원한 후 각 축의 눈금선이 정렬되었는지 확인합니다.
검사 표준:
-
영점 눈금선에 큰 편차가 없으면 계속하여 티치 펜던트의 값과 공장 출하 시 값의 일치성을 검사할 수 있습니다.
-
눈금선이 크게 잘못 정렬된 경우 로봇 영점 위치가 손실되었음을 나타내며 캘리브레이션을 다시 실행해야 합니다.
영점 위치 캘리브레이션:
로봇의 사용 매뉴얼을 참조하여 영점 캘리브레이션을 실행하거나 로봇 제조업체에 연락하여 영점 캘리브레이션에 대한 지원을 받으십시오.
이동 거리 오차 증가 여부 검사
티치 펜던트를 사용하여 작업 공간에서 고정된 방향(예: X 또는 Y 방향)을 따라 특정 거리를 이동하도록 로봇을 제어합니다. 이동 후 이론적인 거리와 로봇이 이동한 실제 거리를 비교하여 그 차이를 측정합니다.
검사 방법:
-
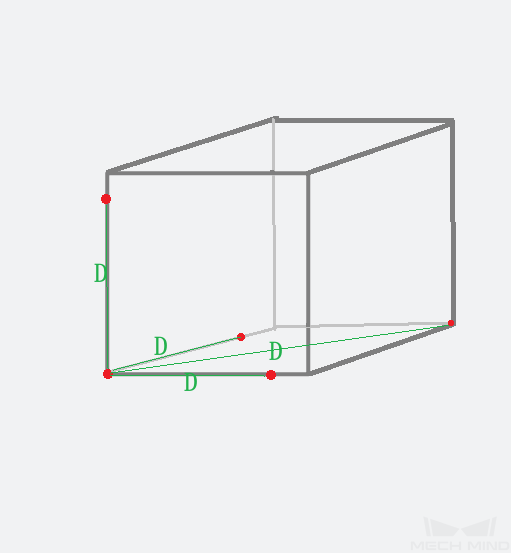
XYZ의 세 축과 대각선에서 두 점을 취하여 티치 펜던트에서 로봇 이동 거리 D와 자로 실제 측정한 거리 D’를 읽고 차이값을 비교합니다.
-
XYZ의 세 방향 및 다른 위치 모두 테스트하는 것을 추천합니다.
검사 표준:
전체 차이값이 작을수록 이동 거리 오차가 작고 로봇의 절대 정확도가 높아집니다.
이동 거리 오차 값은 적용 배포 단계에서 기록된 이동 거리 오차 값과 비교됩니다.
-
오차 값이 크게 증가하지 않으면 로봇의 절대 정확도가 사용 가능함을 뜻합니다. 부정확한 피킹의 원인 분석 및 문재 해결 내용을 참조하여 계속해서 문제를 해결하십시오.
-
오차 값이 커지면 로봇의 절대 정확도가 낮아진 것을 의미하며, 로봇 정확도 오차는 부정확한 피킹의 주요 원인 중 하나입니다. 로봇 제조업체에 연락하여 로봇의 절대 정확도를 교정하십시오.
로봇의 TCP 정확도 확인
검사 방법:
오차 분석 도구를 사용하여 TCP 정확도를 분석하십시오.
작업 방법은 다음과 같습니다.
검사 표준:
-
로봇 플랜지의 끝첨점이 다른 첨점과 겹칠 수 있으면 TCP 정확도가 양호하다는 의미입니다.
-
편차가 크면 TCP 정확도가 낮다는 의미입니다. 로봇 제조업체에 TCP 캘리브레이션을 문의해 주십시오.