비전 시스템 하드웨어 구축
이 부분에서 Mech-Mind 비전 시스템을 구축하는 방법을 소개하겠습니다.
Mech-Mind 비전 시스템을 구축하려면 다음 작업을 순서대로 수행해야 합니다. 개봉 검사→ 하드웨어 설치 → 네트워크에 연결 → 소프트웨어 업그레이드(선택 사항) → 비전 시스템이 이미지를 정상적으로 캡처할 수 있는지 확인.
개봉 검사
-
패키지를 받은 후 패키지가 완전하고 파손되지 않았는지 확인하십시오.
-
패키지에서 <패키지 리스트>를 찾아 리스트를 참조하여 물품 및 부속품이 누락되거나 파손되지 않았는지 확인하십시오.
아래 예시 이미지는 카메라 패키지에 포함된 물품 및 부속품을 보여줍니다. 카메라 패키지 내의 물품은 참조용일 뿐이며 실제 패키지에 있는 <패키지 리스트>를 참조하십시오.

| 번호 | 카테고리 | 명칭 | 기능 |
|---|---|---|---|
1 |
카메라 및 부속품 |
Mech-Eye 산업용 3D 카메라 |
이미지 캡처 |
2 |
카메라 사용 설명서 및 기술 사양 |
Mech-Eye 산업용 3D 카메라 사용 설명서 및 기술 사양 |
|
3 |
카메라 부속품 가방 |
카메라 설치 |
|
4 |
카메라 DC 전원 케이블 |
카메라를 DIN 레일 전원 공급 장치에 연결합니다. 필요에 따라 다양한 길이의 카메라 전원 코드를 선택할 수 있습니다. |
|
5 |
카메라 네트워크 케이블 |
카메라를 IPC에 연결합니다. 필요에 따라 다양한 길이의카메라 네트워크 케이블을 선택할 수 있습니다. |
|
6 |
IPC 및 부속품 |
Mech-Mind IPC STD |
Mech-Mind 소프트웨어의 실행 환경 제공 |
7 |
IPC 부속품 |
마운팅 브래킷, 외부 WiFi 안테나 등 IPC 부속품 |
|
8 |
IPC 전원 케이블 및 어댑터 |
IPC의 전원을 켜는 데 사용됨 |
|
9 |
프로젝트 관련 부속품 |
라이센스 인증 장치(동글) |
소프트웨어의 라이센스를 부여함 |
10 |
캘리브레이션 보드 |
카메라 캘리브레이션에 사용됨 |
|
11 |
플랜지 플레이트 |
캘리브레이션 보드를 연결하는 데 사용됨 |
|
12 |
DIN 레일 전원 공급 장치(선택 사항) |
Mech-Eye 산업용 3D 카메라에 전원 공급 |
|
13 |
패키지 리스트 |
패키지에 있는 모든 물품 및 부속품을 나열함 |
|
|
물품이 손상되거나 누락된 경우 Mech-Mind와 연락하십시오. |
기타 재료 준비
이 튜토리얼에서는 카메라 패키지 내의 물품 외에도 아래 표에 표시된 물품을 따로 준비해야 합니다.
| 물품 | 기능 |
|---|---|
모니터 |
IPC용 디스플레이 제공 |
HDMI 케이블 |
모니터와 IPC를 연결시키는 데 사용됨 |
RJ45 네트워크 케이블 |
IPC와 로봇 컨트롤러를 연결하는 데 사용됨 |
| 이 부분에서는 IPC와 로봇 컨트롤러를 RJ45 네트워크 케이블로 직접 연결하고, IPC와 카메라는 카메라 네트워크 케이블로 직접 연결합니다. 라우터를 사용하여 IPC와 로봇 컨트롤러, IPC와 카메라를 연결할 수도 있습니다. |
하드웨어 설치
카메라 설치
|
이 부분에서는 카메라를 카메라 브래킷에 고정하고 설치(Eye To Hand)합니다. 또한 로봇 말단에 카메라를 장착할 수도 있습니다(Eye in Hand). |
-
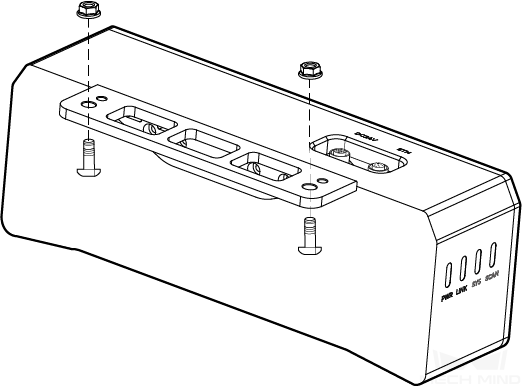
카메라 부속품 가방에서 카메라를 장착할 때 필요한 나사와 스패너를 찾습니다.
-
아래 그림과 같이 두 개의 너트를 스패너로 조여 카메라를 고정합니다.
-
카메라를 설치한 후 렌즈 보호 필름을 떼어냅니다.
-
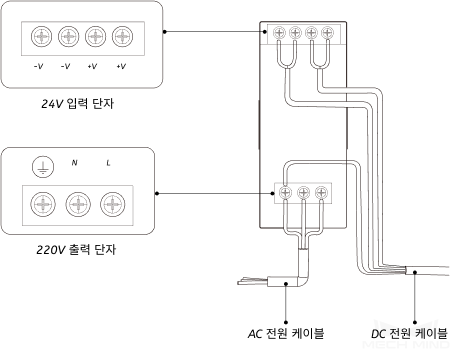
DIN 레일 전원 공급 장치를 사용하여 카메라 전원을 켭니다.
-
DC 전원 케이블 연결:
-
+V는 24V 출력 단자의 +V에 연결됩니다.
-
-V는 24V 출력 단자의 -V에 연결됩니다.
-
PE는 220V 입력 단자
 에 연결됩니다.
에 연결됩니다.
-
-
-
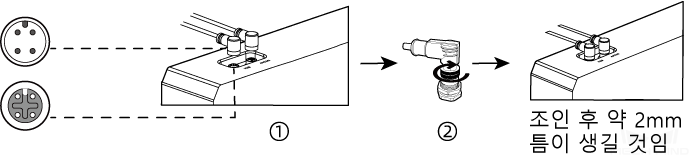
카메라 네트워크 케이블을 연결합니다.
카메라 네트워크 케이블의 에비에이션 플러그 돌출부를 ETH 네트워크 포트의 노치에 맞춰 삽입한 후 고정 너트를 조여줍니다.
IPC 설치
|
IPC는 일반적으로 제어 캐비닛에 설치됩니다. IPC의 설치 환경은 우수한 방열, 환기 및 방진 효과를 갖추어야 하며, IPC의 설치 위치는 네트워크 케이블, HDMI 케이블 및 USB 인터페이스의 설치와 유지 보수가 용이한 곳으로 선택해야 합니다. |
IPC를 설치하려면 다음 단계를 수행하십시오.
-
스패너, 렌치, 나사, 너트 및 와셔를 별도로 준비하십시오.
-
제어 캐비닛에 IPC를 위한 장착 구멍이 있는 경우, IPC를 제어 캐비닛에 고정합니다. 나사, 와셔 및 너트를 순서대로 넣고 아래 그림과 같이 스패너로 너트를 조입니다.

제어 캐비닛의 위치가 고정되어 움직이지 않는 경우, 이 단계를 건너뛰고 IPC를 제어 캐비닛에 직접 배치할 수 있습니다.
-
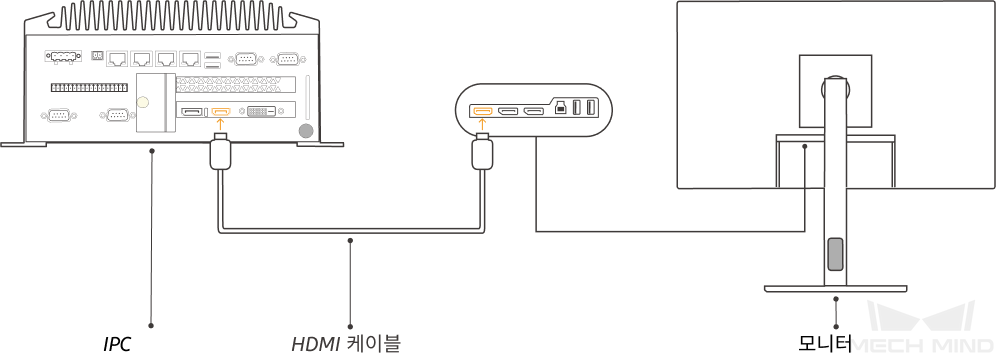
HDMI 케이블을 사용하여 IPC와 모니터를 연결하십시오.
아래 그림과 같이 HDMI 케이블의 한쪽 끝을 모니터의 HDMI 인터페이스에 연결하고 다른 쪽 끝을 IPC의 HDMI 인터페이스에 연결합니다.
-
전원 어댑터를 사용하여 IPC의 전원을 켭니다.
전원 어댑터의 전원 플러그를 IPC의 전원 인터페이스에 삽입하고 전원 어댑터의 다른 쪽 끝을 전원 공급 장치에 연결합니다.
-
동글을 삽입합니다.
동글을 IPC의 USB 포트에 삽입합니다.
-
IPC의 전원을 켠 후 IPC를 시작합니다.
-
IPC가 정상적으로 시작된 후에는 전원 표시등이 항상 켜져 있어야 합니다.
-
IPC를 시작할 수 없는 경우 Mech-Mind 기술 서포트팀에게 문의하십시오.
-
네트워크에 연결
이 부분에서는 IPC와 카메라, IPC와 로봇 간의 네트워크를 연결하는 방법에 대해 설명하겠습니다.
아래 작업은 다음 IP 주소에 따라 네트워크 설정이 이루어집니다. 실제 네트워크 환경에 맞게 조정하시기 바랍니다.
| 장치 | IP 주소 | |
|---|---|---|
IPC |
카메라에 연결된 네트워크 포트 |
192.168.100.10 |
로봇 제어 캐비닛에 연결된 네트워크 포트 |
192.168.200.10 |
|
카메라 |
192.168.100.20 |
|
로봇 |
192.168.200.20 (로봇이 이미 설정됨) |
|
IPC와 카메라, IPC와 로봇 제어 캐비닛 연결
-
카메라에 연결된 네트워크 케이블의 다른 쪽 끝을 IPC의 네트워크 포트에 삽입합니다.
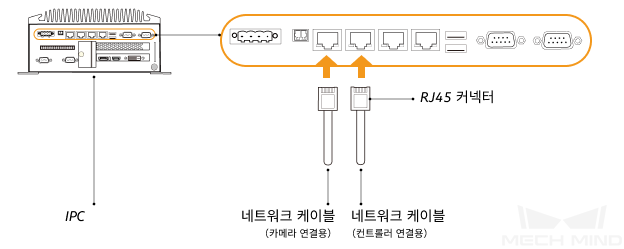
-
양쪽 끝에 RJ45 커넥터가 있는 네트워크 케이블의 한쪽 끝을 IPC의 네트워크 포트에 삽입하고 다른 쪽 끝을 로봇 제어 캐비닛의 네트워크 포트에 삽입합니다.
IPC의 IP 주소 설정
-
IPC에서 을 선택하면 네트워크 연결 페이지가 열립니다.
-
카메라에 연결된 네트워크 포트를 선택하고 마우스 오른쪽 버튼을 클릭하여 이름 바꾸기를 선택한 다음 네트워크 포트 이름을 변경하여 'To_camera’와 같이 네트워크 연결을 나타냅니다.
-
카메라에 연결된 네트워크 포트를 선택하고 마우스 오른쪽 버튼을 클릭한 다음 속성을 선택하여 이더넷 속성 페이지로 들어갑니다.
-
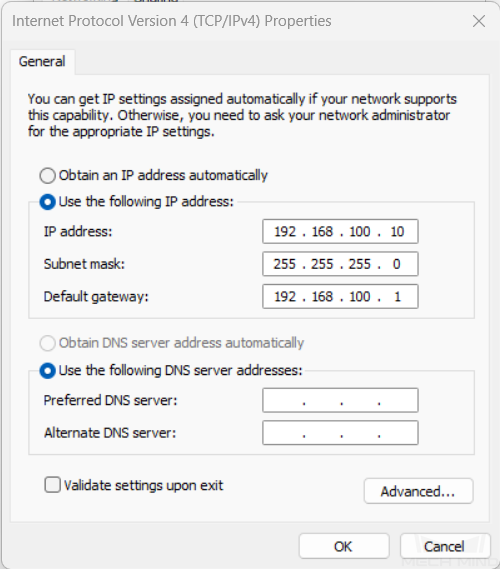
인터넷 프로토콜 버전 4(TCP/IPv4) 체크박스를 선택한 다음 속성 버튼을 클릭하여 인터넷 프로토콜 버전 4(TCP/IPv4) 속성 화면으로 들어갑니다.
-
아래 IP 주소 사용 버튼을 선택하고 IP 주소 필드를 '192.168.100.10’으로 설정하고 서브넷 마스크를 '255.255.255.0’으로 설정합니다. 기본 게이트웨이를 '192.168.100.1’로 설정하고 확인 버튼을 클릭합니다.
-
2~5 단계를 반복하여 로봇 제어 캐비닛에 연결된 네트워크 포트의 이름(예: 'To_robot')을 변경하고 네트워크 포트의 IP 주소를 설정합니다. 예를 들어, 이 네트워크 포트의 IP 주소는 '192.168.200.10’입니다.
IPC의 로봇 제어 캐비닛에 연결된 네트워크 포트의 IP 주소는 로봇의 IP 주소와 동일한 네트워크 세그먼트에 있어야 합니다.
카메라 IP 주소 설정
-
IPC의 바탕 화면에서
 아이콘을 두번 클릭하여 Mech-Eye Viewer 소프트웨어를 열고 실행합니다.
아이콘을 두번 클릭하여 Mech-Eye Viewer 소프트웨어를 열고 실행합니다. -
카메라 리스트에서 카메라를 선택하고 마우스를 카메라 정보 열로 이동하면
 아이콘이 나타납니다. 이 아이콘을 클릭하여 카메라 네트워크 서비스 구성 다이얼로그 박스로 들어갑니다.
아이콘이 나타납니다. 이 아이콘을 클릭하여 카메라 네트워크 서비스 구성 다이얼로그 박스로 들어갑니다.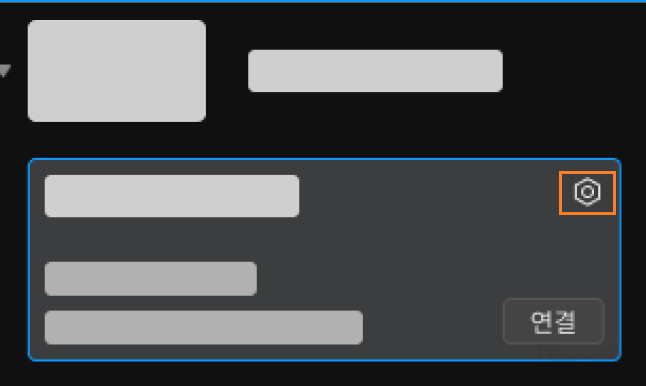
카메라를 검색하거나 연결할 수 없는 경우 카메라 문제 해결을 참조하여 문제를 해결하십시오.
-
IP 구성 영역에서 고정 IP로 설정하기 버튼을 선택하고 실제 네트워크 환경에 따라 IP주소 유형, IP 주소 및 서브넷 마스크를 설정합니다. 아래 그림과 같이, 위 파라미터의 값을 각각 '유형 C 192.168.x.x', '192.168.20.116’과 '255.255.255.0’입니다. 마지막으로 적용 버튼을 클릭합니다.
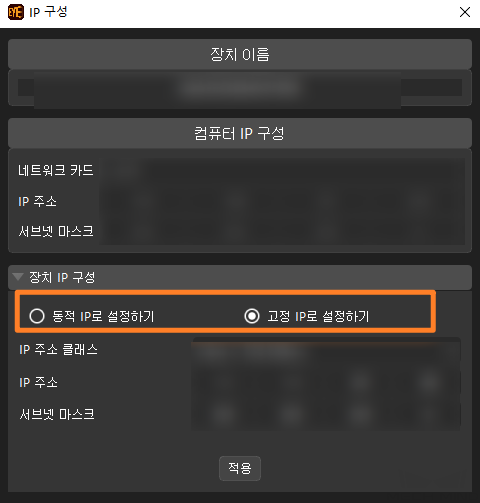
|
카메라의 IP 주소는 IPC의 카메라에 연결된 네트워크 포트의 IP 주소와 동일한 네트워크 세그먼트에 있어야 합니다. |
네트워크 연결 테스트
-
Win + R 단축키를 눌러 실행 인터페이스로 들어갑니다.
-
열기에
cmd를 입력하고 확인을 클릭합니다. -
명령 창에 ping XXX.XXX.XX.XX를 입력하고 Enter를 클릭하여 명령을 실행합니다.
XXX.XXX.XX.XX를 실제로 설정한 카메라나 로봇의 IP 주소로 바꾸십시오.
네트워크 연결이 정상이면 다음과 같은 응답을 받아야 합니다.
Ping XXX.XXX.XX.XX 32바이트 데이터 사용:
XXX.XXX.XX.XX의 응답: 바이트=32 시간<1ms TTL=128
XXX.XXX.XX.XX의 응답: 바이트=32 시간<1ms TTL=128
XXX.XXX.XX.XX의 응답: 바이트=32 시간<1ms TTL=128
XXX.XXX.XX.XX의 응답: 바이트=32 시간<1ms TTL=128소프트웨어 업그레이드(선택 사항)
Mech-Mind에서 구입한 IPC에는 최신 버전의 Mech-Mind 소프트웨어가 설치되어 있습니다.
IPC의 각 소프트웨어가 최신 버전인지 확인하십시오. 소프트웨어가 최신 버전이면 이 부분을 건너뛰고 소프트웨어가 최신 버전이 아니면 다음 내용을 참조하여 소프트웨어를 최신 버전으로 업그레이드하십시오.
캡처된 이미지 퀄리티 확인
IPC와 카메라 및 로봇 간의 네트워크 연결 상태를 확인하고 소프트웨어가 최신 버전인지 확인한 후, 비전 시스템이 정상적으로 이미지를 캡처할 수 있는지, 이미지 품질이 요구 사항을 충족하는지 확인해야 합니다.
-
카메라 시야 내 작업 평면의 중앙에 공작물을 배치합니다.
-
IPC의 바탕 화면에서
아이콘을 두 번 클릭하여 Mech-Eye Viewer 소프트웨어를 열고 실행합니다. -
카메라 리스트에서 카메라를 선택하고 연결을 클릭합니다.
-
"Reflective" 파라미터 그룹 모델을 선택한 후에 단번 획득 버튼을 클릭합니다.
-
가장자리와 가장 높은 층의 대상 물체가 모두 카메라 시야 내에 있는지 확인하세요.
-
카메라가 캡처한 이미지의 퀄리티가 요구 사항을 충족하는지 확인합니다. 요구 사항을 충족하는 이미지는 다음과 같습니다.
-
2D 이미지: 노출 과다(너무 하얗게 되어 물체가 보이지 않음) 또는 노출 부족(너무 어둡게 되어 물체의 세부 사항을 구분할 수 없음) 문제가 없습니다.
-
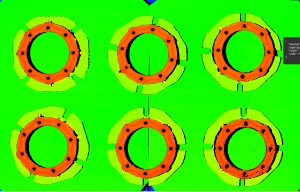
뎁스 맵 및 포인트 클라우드: 물체에 명확한 누락점이 없습니다.
2D 이미지 뎁스 맵 포인트 클라우드 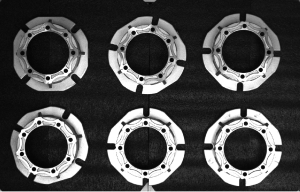
-
|
카메라로 캡처한 이미지가 요구 사항을 충족하지 못하는 경우 Mech-Eye Viewer 소프트웨어를 사용하여 카메라 파라미터를 조정하십시오. |
여기까지 비전 시스템을 구축하는 방법에 대한 소개였습니다.