외부 파라미터의 오차가 커지는지 판단하기
이 부분에서는 외부 파라미터의 오차를 평가하는 방법을 설명합니다.
ETH 모드에서 외부 파라미터의 오차가 커지는지 판단하기
외부 파라미터를 평가하기 전에 캘리브레이션 보드가 로봇의 마지막 관절에 단단히 장착되었는지 확인하십시오. 캘리브레이션 보드를 장착한 후, 메뉴 바에서 를 선택한 다음 오차 분석 인터페이스에서 을 선택합니다.
“ETH 외부 파라미터 오차 분석” 도구를 사용하여 외부 파라미터를 평가하는 상세한 프로세스는 다음과 같습니다.
-
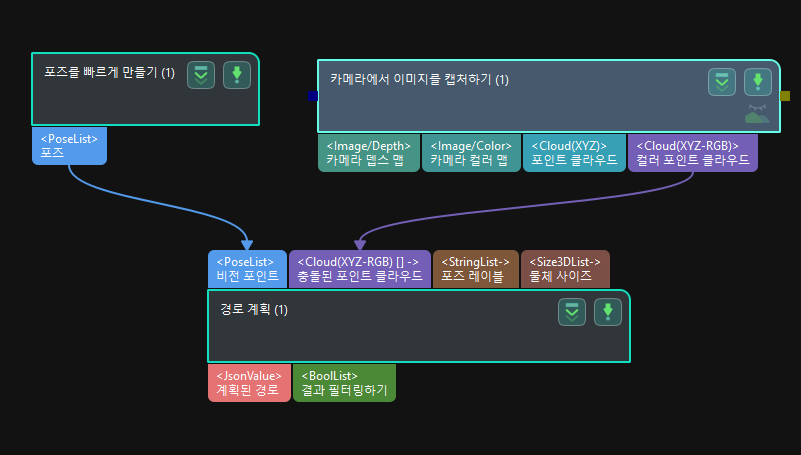
캘리브레이션 보드 포즈를 얻기 위한 새로운 프로젝트를 구축해야 합니다. 구축할 프로젝트는 다음 그림과 같습니다.
-
로봇 포즈를 동기화하고 캘리브레이션 보드 포인트 클라우드를 포함한 시나리오 포인트 클라우드를 얻습니다.
-
프로젝트의 “경로 계획” 스텝을 선택한 다음 스텝 파라미터 패널에서 편집기를 열기 버튼을 클릭하여 3D 시뮬레이션 공간을 엽니다.
-
실제 로봇의 포즈를 "경로 계획" 도구에 동기화하여 시뮬레이션 인터페이스의 로봇 포즈가 실제 로봇의 포즈와 동일한지 확인합니다.
-
시뮬레이션 버튼을 클릭하여 캘리브레이션 보드가 포함된 시나리오 포인트 클라우드를 시각화합니다(시뮬레이션을 클릭한 후 관련 오류 메시지는 무시될 수 있음).
-
-
캘리브레이션 보드의 가상 TCP를 생성합니다.
-
“경로 계획 도구”의 리소스에 종료 도구를 추가합니다.
-
3D 시뮬레이션 영역에서 말단 장치의 시각화를 확인하고 TCP가 캘리브레이션 보드의 원 중심과 일치하도록 파라미터를 조정합니다(포즈 축은 원의 십자와 일치해야 하며 XOY 평면은 캘리브레이션 보드 평면과 밀접하게 정렬됨).
-
말단장치의 이름을 입력하고 확인을 클릭하면 가상 TCP 생성이 완료됩니다.
-
-
작업 공간의 다른 위치에서 외부 파라미터를 평가합니다.
-
티치 펜던트를 사용하여 실제 로봇을 작업 공간의 다른 위치로 이동합니다.
-
실제 로봇의 포즈를 "경로 계획" 도구에 동기화하여 시뮬레이션 인터페이스의 로봇 포즈가 실제 로봇의 포즈와 동일한지 확인합니다.
-
시뮬레이션 버튼을 클릭하여 새로운 캘리브레이션 보드와 시나리오 포인트 클라우드를 얻습니다.
-
이전에 추가한 가상 TCP가 캘리브레이션 보드의 원 중심과 일치하는지 확인합니다.
-
가상 TCP와 캘리브레이션 보드의 원 중심 사이의 편차가 크면 외부 파라미터의 옾차가 크므로 외부 파라미터 캘리브레이션을 다시 수행해야 합니다.
EIH 모드에서 외부 파라미터의 오차가 커지는지 판단하기
외부 파라미터를 평가하기 전에 캘리브레이션 보드가 카메라 시야 중앙에 배치되어 있는지 확인하십시오. 캘리브레이션 보드를 배치한 후, 카메라 캘리브레이션 화면의 “EIH 외부 파라미터 오차 분석” 도구를 사용하여 외부 파라미터를 판단할 수 있습니다.
“EIH 외부 파라미터 오차 분석” 도구를 사용하여 외부 파라미터를 평가하는 상세한 프로세스는 다음과 같습니다.
-
프로젝트 리스트에서 프로젝트를 선택하고 툴 바에 있는 카메라 캘리브레이션(표준) 버튼을 클릭합니다.
-
캘리브레이션 사전 구성 창에서 기존 캘리브레이션 파라미터 로드 버튼을 선택하고 프로젝트의 기존 켈리브레이션 파라미터를 선택한 후 다음 버튼을 클릭합니다.
-
파라미터 용도 선택 창에서 현재 로드된 카메라 캘리브레이션 라디오 버튼을 선택한 후 다음 버튼을 클릭합니다.
카메라 상태는 “연결됨”이라고 표시되어야 합니다. -
캘리브레이션 작업 선택 화면에서 외부 파라미터 재계산 버튼을 선택하고 캘리브레이션 데이터를 로드하기 확인란을 선택된 상태로 유지한 다음 캘리브레이션 시작 버튼을 클릭합니다. 캘리브레이션 창이 팝업됩니다.
-
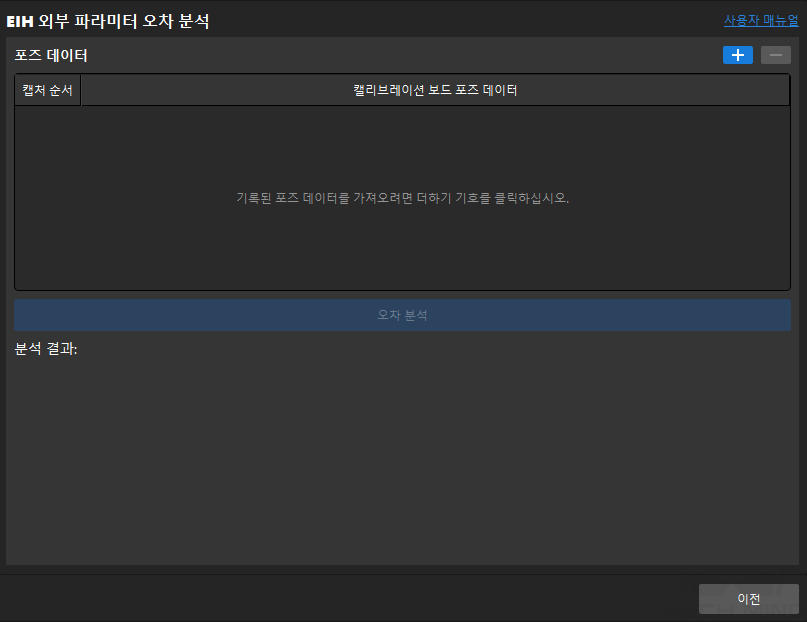
외부 파라미터 계산 스텝에서 보충 도구의 외부 파라미터 정확도를 클릭한 다음 팝업된 오차 분석 인터페이스에서 EIH 외부 파라미터 오차 분석을 선택합니다.
-
EIH 외부 파라미터 오차 분석의 작업 가이드를 알아보고 다음 페이지 버튼을 클릭합니다.
-
+를 클릭하면 여러 세트의 캘리브레이션 보드의 포즈 데이터를 추가할 수 있습니다.
-
오차 분석 버튼을 클릭하여 분석 결과를 확인합니다.
오차값이 더 커지면(애플리케이션 구성 단계의 오차값과 비교하여) 외부 파라미터 캘리브레이션을 다시 수행해야 합니다.