그리퍼 오프셋 소개
이 섹션에서는 그리퍼 오프셋의 개요와 기능 및 단점을 소개합니다.
오프셋이란?
그리퍼 오프셋이란 그리퍼의 구조적 형태를 의미합니다. 아래에서는 두 가지 상황으로 나누어 그리퍼 오프셋을 설명하겠습니다.
-
수평 방향에서의 좌표 오프셋
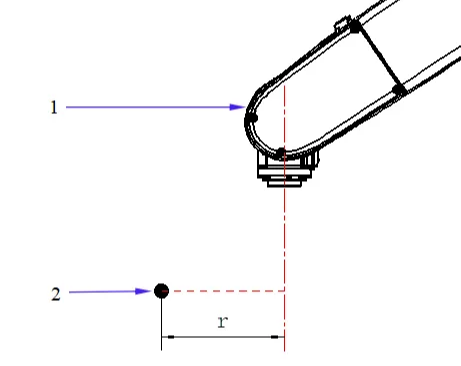
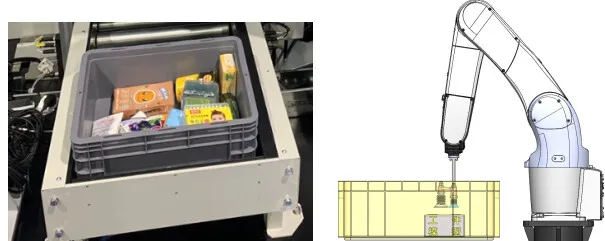
로봇이 대상 물체를 피킹할 때, 로봇의 플랜지 포즈와 픽 포인트가 추의 수직선 방향에서 일정한 수평 거리를 가질 수 있습니다(오프셋 반경). 아래 그림에서, 1은 로봇, 2는 픽 포인트, r은 오프셋 반경을 나타냅니다.
-
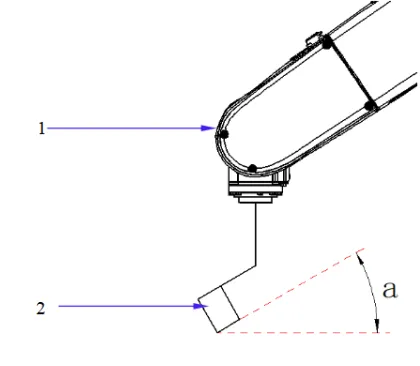
TCP 방향(각도)의 오프셋
일부 상황에서는 그리퍼 끝의 피킹 면이 로봇 플랜지 설치 면과 일정 각도를 이뤄 오프셋 범위를 더욱 늘릴 수 있습니다. 아래 그림에서, 1은 로봇, 2는 그리퍼를 나타냅니다.
오프셋의 기능
그리퍼 오프셋은 설계 시 위치나 각도 차이를 미리 정의하여, 로봇 피킹 포즈를 최적화하고 간섭을 피하며 복잡한 상황에서 유연성과 효율성을 향상시키는 데 도움이 됩니다.
로봇 손목 관절의 싱귤래리티 회피
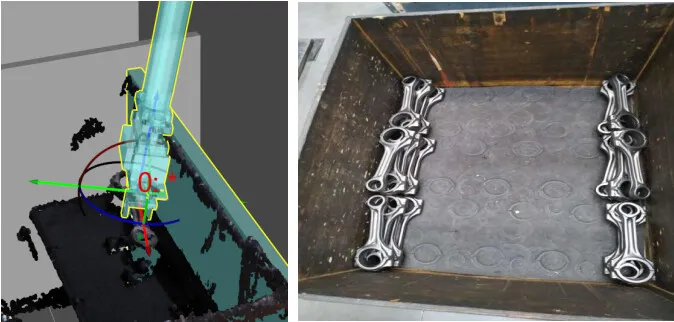
실제 프로젝트에서 대상 물체가 들어오는 방식은 매우 다양하며, 대상 물체의 포즈를 제어할 수 없는 경우도 많습니다. 그리퍼에 오프셋이 없으면 로봇이 피킹하기 위해 설정한 포즈가 싱귤래리티에 걸릴 수 있습니다.
아래 그림과 같이, 이때 로봇의 플랜지 포즈와 픽 포인트가 동일한 수직선 상에 있지 않도록 해야 합니다.
극한 공간에서의 피킹 성공률 향상
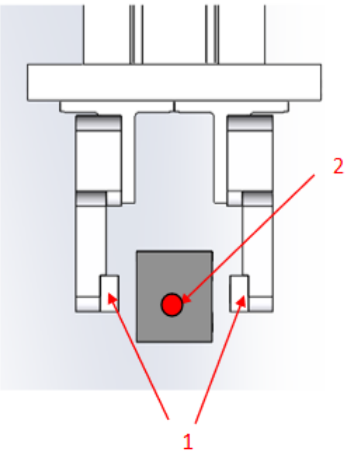
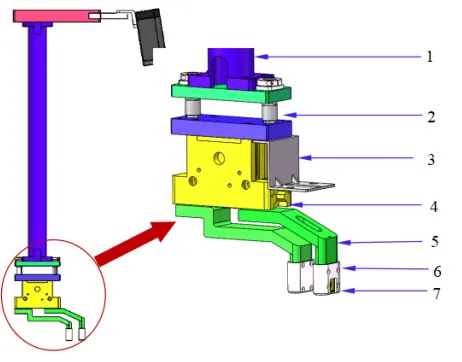
일부 상황에서는 고객사는 높은 피킹 성공률을 요구하지만, 공간이 좁거나 그리퍼 크기가 크거나 대상 물체의 모양이 특수한 경우, 혹은 특정 위치에 있는 대상 물체를 피킹하기 어려운 문제가 발생할 수 있습니다. 이때 오프셋이 없는 그리퍼를 사용하면 그리퍼가 주변 물체와 충돌할 가능성이 큽니다. 아래 그림과 같습니다.
이때 그리퍼에 오프셋을 적용(아래 그림의 녹색 부분)하여 모서리에 있는 대상 물체를 피킹할 수 있도록 합니다. 아래 그림에서, 1은 연장 팔, 2는 완충 장치, 3은 센서 설치대, 4는 그리퍼의 공압 실린더, 5는 그리퍼 핑거, 6는 그리퍼 핑거 슬리브, 7은 센서를 나타냅니다.
오프셋의 단점
그리퍼 오프셋을 설정할 때 다음 단점을 고려하고 피킹 검증을 해야 합니다.
로봇 사용 가능한 페이로드 감소
로봇의 실제 가능한 페이로드는 로봇 본체의 페이로드 곡선과 그리퍼 오프셋에 따라 달라지며, 오프셋 페이로드가 프로젝트의 피킹 요구 사항을 충족할 수 있는지 반드시 검증해야 합니다.
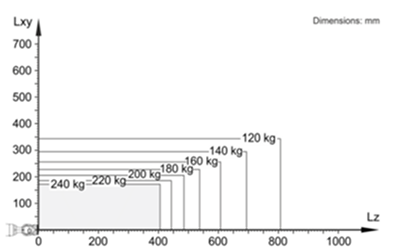
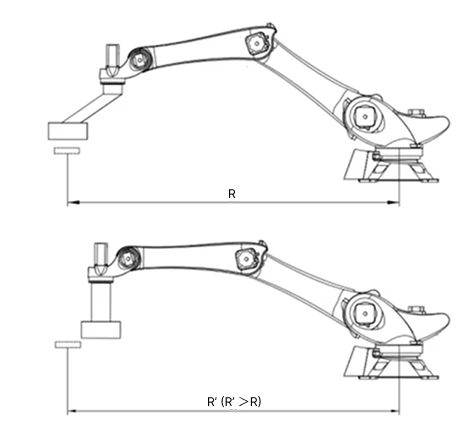
아래 그림은 로봇 말단에서의 페이로드 곡선 변화를 보여줍니다. Lxy는 플랜지 기준 좌표계에서 X/Y축 방향의 오프셋을 나타내며, Lz는 플랜지 기준 좌표계에서 Z축 방향의 오프셋을 나타냅니다.
오프셋이 250mm보다 크면 로봇의 페이로드가 급격히 감소합니다. 그러나 오프셋이 170mm 미만이고 Z축을 따라 400mm로 증가하면 페이로드는 여전히 유지될 수 있습니다.