'포인트 클라우드 사전 처리' 관련 문제
이 부분 내용은 '포인트 클라우드 사전 처리' 프로세스에서 발생할 수 있는 문제들과 그 원인, 그리고 해결 방법에 대한 설명입니다.
포인트 클라우드 품질이 좋지 않음
-
문제 현상
사전 처리된 후, 포인트 클라우드의 품질이 좋지 않았습니다.
-
원인 추측
-
카메라 노출 관련 파라미터가 올바르게 설정되지 않았습니다.
-
작업 현장의 강한 조명으로 인해 이미지 캡처가 방해를 받았습니다.
-
트레이 벽은 반사성이 있어서 포인트 클라우드의 품질이 좋지 않습니다.
-
-
해결 방법
-
대상 물체의 실제 특성에 따라 카메라 노출 파라미터를 올바르게 설정해야 합니다. 반사율이 높은 대상 물체의 경우, Mech-Eye Viewer에서 프로젝터의 프린지 코딩 모드를 Reflective로 설정하는 것이 좋습니다. 이 파라미터는 전문가 또는 마스터로 설정된 경우에만 표시됩니다.
-
워크스테이션을 차광하여 강한 빛이 직접 비추지 않도록 하세요.
-
중공 바구니 등 반사되지 않는 용기를 사용하는 것이 좋습니다.
-
배경 포인트 클라우드가 제거되지 않음
-
문제 현상
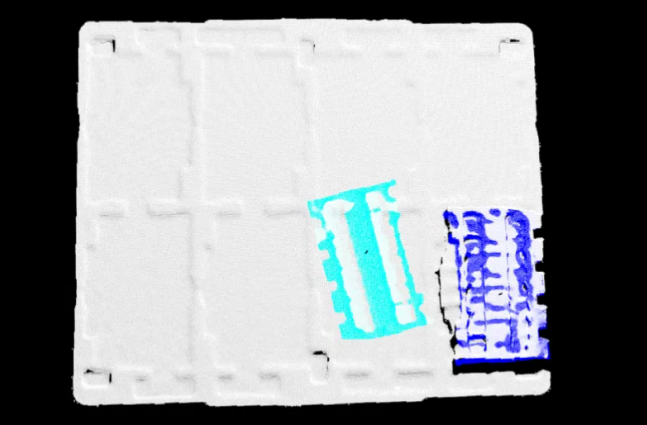
포인트 클라우드 사전 처리 후 배경 포인트 클라우드가 제거되지 않아 후속 인식 결과에 영향을 미쳤습니다. 다음 그림과 같이 배경 포인트 클라우드는 대상 물체로 잘못 식별되었습니다.
-
원인 추측
포인트 클라우드 사전 처리와 관련된 파라미터 설정이 적절하지 않았습니다.
-
해결 방법
-
대상 물체와 배경 사이에 끼어 있는 포인트 클라우드를 제거하면서 대상 물체의 포인트 클라우드가 가능한 한 완벽하게 유지되도록 하려면 '포인트 필터' 카테고리에서 최대 극각(polar angle) 파라미터 값을 낮춥니다.
-
'클러스터링을 통해 노이즈 제거' 기능을 활성화하고 아래에 표시된 파라미터를 조정합니다.
파라미터 조정 설명 클러스터 반경
일반적으로 기본 설정을 사용하면 됩니다. 이 파라미터의 값을 늘리면 멀리 떨어진 포인트 클라우드를 하나의 클러스터로 묶을 수 있지만, 스텝의 실행 시간이 길어질 수 있습니다.
클러스터당 최소 포인트 수
이 파라미터의 값은 노이즈 포인트 클라우드의 포인트 수보다 커야 하고 대상 물체 포인트 클라우드의 포인트 수보다 작아야 합니다.
클러스터당 최대 포인트 수
이 파라미터의 값은 대상 물체 포인트 클라우드의 포인트 수보다 커야 합니다. 제거할 배경 포인트 클라우드의 포인트 수가 많은 경우, 이 파라미터의 값을 배경 포인트 클라우드의 포인트 수보다 작게 설정하세요.
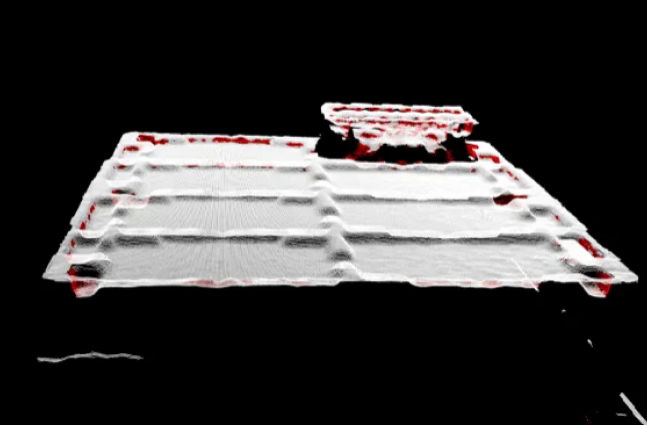
위의 파라미터를 조정한 후에는 배경 포인트 클라우드(아래 그림의 흰색 포인트 클라우드)가 제거됩니다.
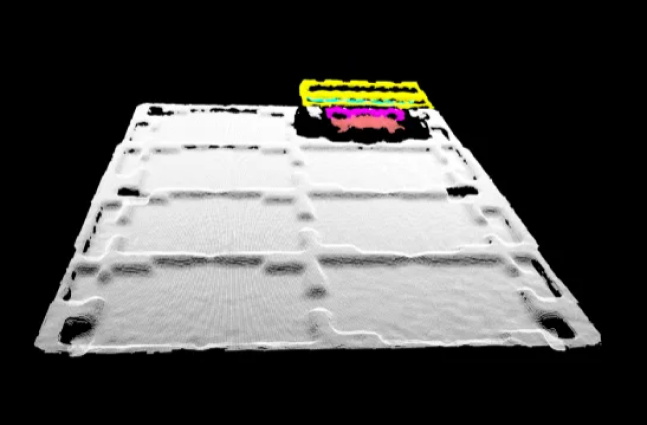
포인트 클라우드 클러스터링을 통해 배경 포인트 클라우드를 제거할 수 없는 경우, '대상 물체 선택 및 인식' 프로세스에서 딥 러닝으로 인식 지원 기능을 활성화해 보세요.
-
