주제: “3D 매칭” 일반적인 문제 해결
이 섹션은 포인트 클라우드 모델의 법선 이상으로 인한 매칭 문제와 포인트 클라우드 모델과 매칭 대상 포인트 클라우드의 좌표계 불일치로 인한 매칭 문제를 처리하는 방법을 소개합니다.
포인트 클라우드 모델 법선 이상으로 인한 매칭 문제
Mech-Vision 2.0.0부터 매칭 과정은 포인트 클라우드 모델의 법선에 대해 엄격한 요구 사항을 가지며, 포인트 클라우드 모델의 법선이 이상일 경우 매칭이 실패하게 됩니다. 아래에서는 두 가지 법선 이상 상황과 그에 대한 대응 방법을 소개합니다.
STL 모델을 사용하여 포인트 클라우드 모델을 생성한 후 법선 이상
-
문제 증상
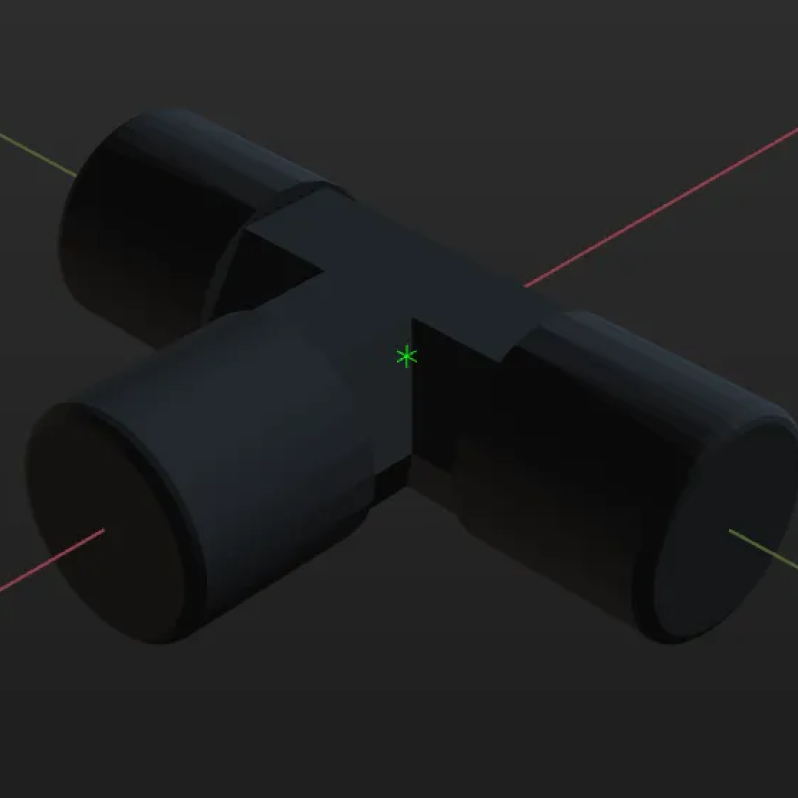
STL 모델을 대상 물체 편집기에 가져온 후, 모델의 일부 영역이 검은색으로 나타나면 일반적으로 해당 영역에 문제가 있음을 나타냅니다. 정상적인 경우, 모델은 균일한 렌더링 효과를 보여야 합니다.
아래 표는 법선이 올바른 경우와 잘못된 경우의 모델의 예를 보여줍니다.
포인트 클라우드 모델 법선이 올바른 경우 포인트 클라우드 모델 법선이 잘못된 경우 


-
해결 방법
STL 모델의 법선이 올바르지 않은 경우 "STL 모델 법선 복구 도구"를 사용하여 STL 모델을 복구할 수 있습니다.
"STL 모델 법선 복구 도구"의 다운로드와 사용 방법은 STL 모델 복구 내용을 참조하세요.
스텝을 사용하여 포인트 클라우드 모델을 생성한 후 법선 또는 접선 이상
-
문제 증상
스텝을 통해 생성된 가장자리 포인트 클라우드 모델이 포인트 클라우드 클러스터링 및 가장 높은 층의 포인트 클라우드를 획득하기 등의 과정을 거친 후, 법선 또는 접선 이상이 발생할 수 있습니다.
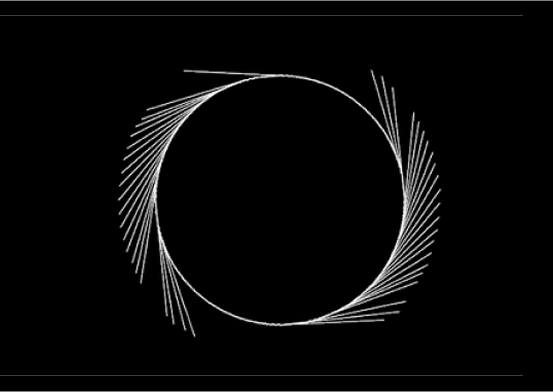
가장자리 포인트 클라우드 모델 법선이 올바른 경우 가장자리 포인트 클라우드 모델 법선이 잘못된 경우 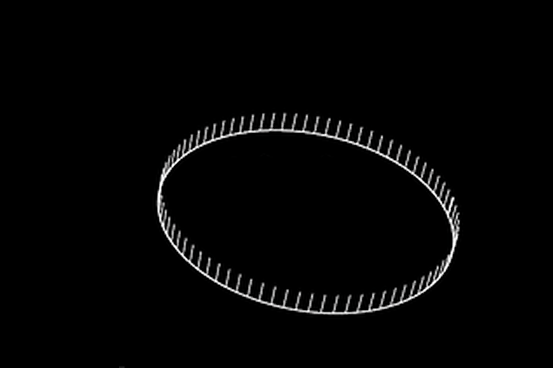
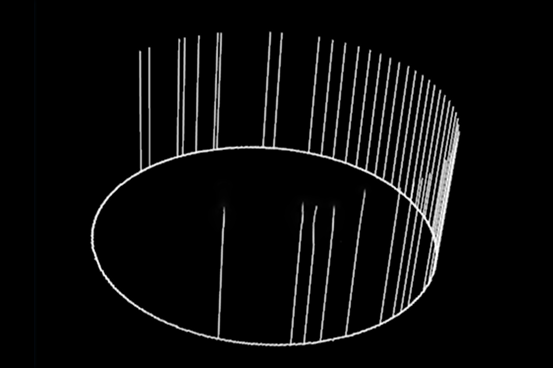
가장자리 포인트 클라우드 모델 접선이 올바른 경우 가장자리 포인트 클라우드 모델 접선이 잘못된 경우 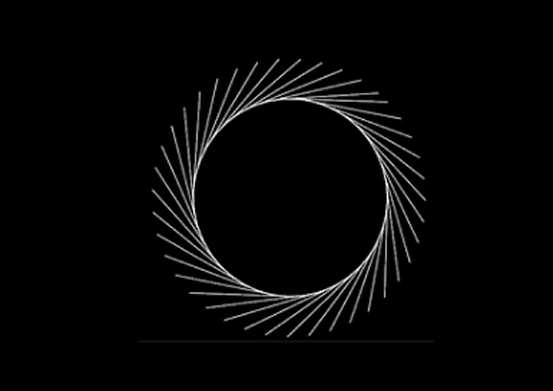
-
해결 방법
스텝에서 생성된 포인트 클라우드 모델을 그대로 매칭에 사용하는 것을 권장합니다.
포인트 클라우드 모델과 매칭 대상 포인트 클라우드의 좌표계 불일치로 인한 매칭 문제
"3D 매칭" 스텝을 사용할 때, 카메라 좌표계에서의 포인트 클라우드를 포인트 클라우드 모델로 사용하는 것이 권장되며, "3D 매칭" 스텝에 입력되는 매칭 대상 포인트 클라우드가 포인트 클라우드 모델이 위치한 좌표계와 일치하는지 확인해야 합니다.
포인트 클라우드 모델이 위치한 좌표계와 매칭 대상 포인트 클라우드의 좌표계가 일치하지 않는 경우, 매칭 결과가 없거나 잘못된 매칭이 발생할 수 있습니다. 아래에서는 해당 문제에 대해 자세히 설명합니다.
겹치는 물체의 포즈 제거 기능을 활성화한 후 올바른 매칭 결과 제거됨
겹치는 물체의 포즈 제거 기능을 활성화하면, 카메라 좌표계에서의 대상 물체 포인트 클라우드와 그 위의 다른 포인트 클라우드의 겹치 비율이 임계값을 초과할 경우, 겹치된 대상 물체의 포즈가 제거됩니다.
하지만 일부 경우에는 올바른 매칭 결과가 필터링될 수도 있습니다. 구체적인 문제는 아래와 같이 설명됩니다.
-
문제 증상
"3D 매칭" 스텝에서 겹치는 물체의 포즈 제거 기능을 활성화한 후 올바른 매칭 결과를 필터링합니다.
-
가능한 원인
대상 물체 포인트 클라우드는 카메라 좌표계에 있고, 매칭할 포인트 클라우드는 로봇 좌표계에 있을 때, 상세 매칭 결과가 여러 개 존재하면 올바른 매칭 결과가 필터링되어 제거됩니다.
-
해결 방법
매칭 과정에서 "3D 매칭" 스텝에 입력되는 매칭할 포인트 클라우드가 포인트 클라우드 모델의 좌표계와 일치하는지 확인하십시오.
"각도 임계값" 조정 후 매칭 오류가 발생하거나 매칭 결과가 없음
STL 모델로 생성된 포인트 클라우드 모델을 사용하여 매칭할 경우, "3D 매칭" 스텝의 파라미터를 조정하여 포인트 클라우드 모델에서 보이지 않는 부분을 제거함으로써 매칭 속도와 정확도를 향상시킬 수 있습니다. 이 파라미터는 Expert 조정 레벨에서 설정할 수 있습니다.
그러나 "각도 임계값"을 조정하면 매칭 오류 또는 매칭 결과가 없을 수도 있으며, 구체적인 문제는 다음과 같습니다.
-
문제 증상
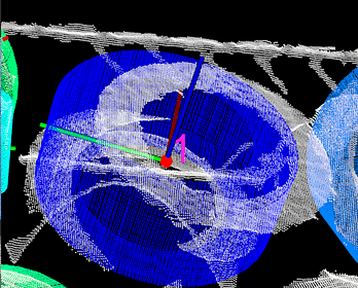
"각도 임계값"이 180°일 때는 매칭이 성공합니다. "각도 임계값"을 조정한 후 매칭 결과가 조정 전과 비교해 차이가 크며, 매칭 오류가 발생합니다.
"각도 임계값"이 180°일 때 "각도 임계값"이 135°일 때 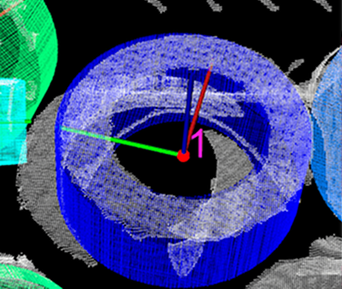
-
가능한 원인
포인트 클라우드 모델과 대상 물체 포인트 클라우드의 좌표계가 일치하지 않습니다.
-
해결 방법
매칭 과정에서 "3D 매칭" 스텝에 입력되는 매칭할 포인트 클라우드가 포인트 클라우드 모델의 좌표계와 일치하는지 확인하십시오.
링 유형 STL 모델의 내벽 포인트 클라우드 누락으로 인한 매칭 문제
-
문제 증상
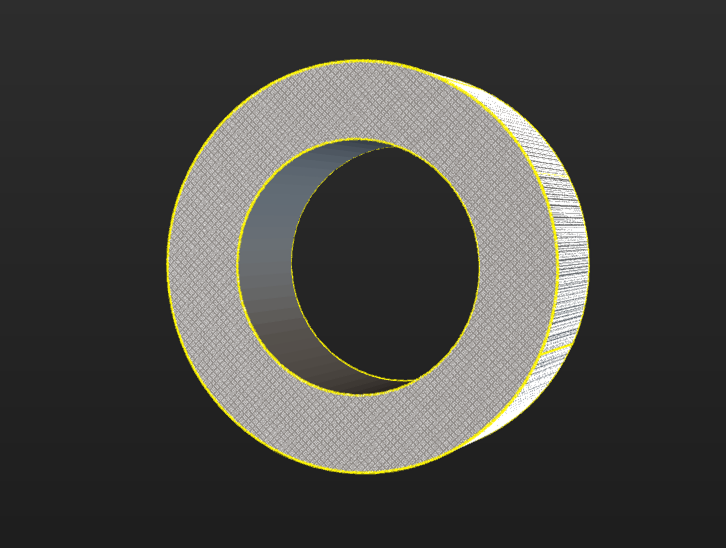
Mech-Vision 2.x를 사용하여 링 유형 STL 모델을 기반으로 포인트 클라우드 모델을 생성한 후, 포인트 클라우드 모델에 링 내벽의 포인트 클라우드가 누락되어 매칭 결과의 신뢰도가 낮아졌습니다.
-
해결 방법
이 문제는 Mech-Vision 1.8 버전에서는 발생하지 않습니다. Mech-Vision 2.1.2 버전에서는 대상 물체 편집기를 사용하여 STL 모델에 대해 완전한 표면 포인트 클라우드를 생성할 수 있습니다.