경로 계획
기능 설명
이 스텝은 입력된 비전 포인트를 사용하여 로봇 경로를 계획하고 성공적으로 계획된 로봇 경로를 출력하는 데 사용됩니다.
|
“경로 계획” 스텝의 기능은 Mech-Viz와 관련되어 있으며, 이 스텝을 사용하려면 먼저 Mech-Viz 소프트웨어를 설치하고 소프트웨어 라이센스를 획득해야 합니다. |
|
응용 시나리오
이 스텝은 일반적으로 표준 인터페이스 또는 Adapter 통신 방식을 사용하고, 비전 포인트 근처의 로봇 이동 경로만 계획하면 되는 프로젝트에서 사용됩니다. 시나리오를 구축하고 비전 포인트를 입력한 후 이 스텝에서는 포인트 클라우드 충돌 감지와 경로 계획을 거쳐 충돌 없는 로봇 이동 경로를 출력합니다.
일반적으로 이 스텝의 앞/뒤에 연결되는 스텝은 다음과 같습니다.
-
앞에 연결되는 스텝: 포즈 조정과 포즈 처리 관련 스텝.
-
뒤에 연결되는 스텝: “출력” 스텝(“포트 유형”을 “Predefined(robot path)”로 설정해야 함).
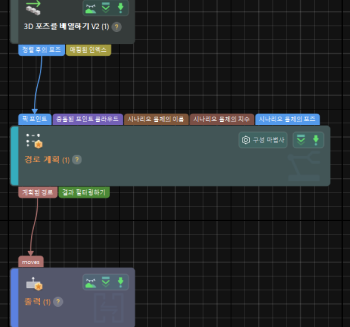
입력 및 출력
입력
-
비전 포인트: 이 포트에 입력된 포즈는 로봇 경로 계획에 사용됩니다.
-
충돌 포인트 클라우드: 이 포트에 입력된 포인트 클라우드는 말단장치와의 충돌 감지에 사용됩니다.
-
포즈 분류 레이블: 각 비전 포인트에 해당하는 물체 레이블이 이 포트에 입력됩니다.
-
물체 치수: 각 비전 포인트에 해당하는 물체 치수가 이 포트에 입력됩니다.
“시나리오 물체 업데이트” 옵션이 활성화되면 다음 세 개의 입력 포트가 나타납니다.
-
시나리오 물체의 이름 시나리오 물체의 이름이 이 포트에 입력됩니다.
-
시나리오 물체의 치수: 시나리오 물체의 치수가 이 포트에 입력됩니다.
-
시나리오 물체의 포즈: 시나리오 물체의 포즈가 이 포트에 입력됩니다.
파라미터 설명
경로 계획 설정
- 작업 흐름 구성
-
파라미터 설명: 경로 계획 도구를 열어 드롭다운 목록에서 구성된 작업 흐름을 선택합니다.
- 시나리오 물체 업데이트
-
이 옵션을 활성화하면, 스텝 블록에 시나리오 물체의 이름, 시나리오 물체의 치수 및 시나리오 물체의 포즈 입력 포트가 추가되며 시나리오 물체의 포즈와 치수를 업데이트하는 데 사용될 수 있습니다.
- 포인트 클라우드 유형
-
파라미터 설명: 이 파라미터는 경로 계획 도구에 입력되는 포인트 클라우드의 유형을 설정하는 데 사용됩니다.
값 리스트: CloudXYZRGB(컬러 포인트 클라우드), CloudXYZ(포인트 클라우드), CloudXYZNormal(법선 방향을 갖춘 포인트 클라우드)
기본값: CloudXYZRGB
- 입력된 포인트 클라우드가 카메라 좌표계에 있는지 여부 판단
-
파라미터 설명: 포인트 클라우드가 카메라 좌표계에 있는 경우, 이 파라미터를 선택해야 합니다. 이 파라미터를 선택하면, 포인트 클라우드가 로봇 기준 좌표계로 전환하고 경로 계획 도구에 입력됩니다. 이 파라미터를 선택하지 않으면, 카메라 좌표계에 있는 포인트 클라우드가 직접 경로 계획 도구에 입력됩니다.
기본값: 선택되어 있음