Use Only Mech-Vision to Send Vision Points
This section elaborates an Adapter example program that used only Mech-Vision to send vision points.
Background Introduction
This section introduces an Adapter example program written for a crankshaft tending scenario, in which the camera was mounted on a bracket above the bin and Mech-Vision output the pose of the workpiece to pick after capturing the image.
This Adapter example program worked with the Mech-Vision example project “Large Non-Planar Workpieces” ().
This example project adopted 3D model matching algorithms, and set different model files and pick points for different workpieces. Therefore, the parameter recipe needed to be set in Mech-Vision in advance and the recipe ID of the desired workpiece was sent together with the image capturing command from the robot side.
Communication Solution
The robot and the industrial PC (IPC) installing Mech-Vision and Mech-Viz communicate with each other through the TCP/IP Socket protocol. Data were exchanged in ASCII string format with the comma (,) as the separator.
During the communication, the vision system acts as the server while the robot as the client.
The following figure shows the communication process.
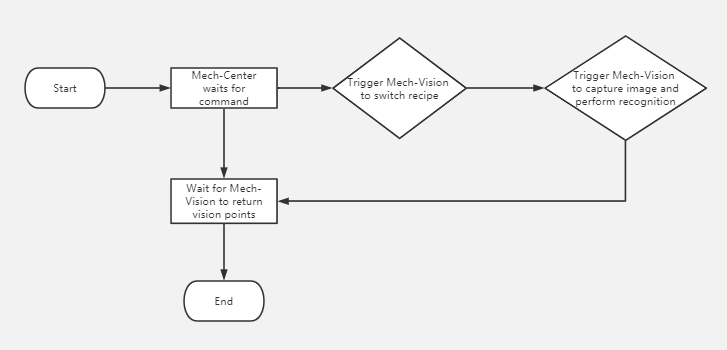
The communication process is detailed as follows:
-
Communication Component waits for the robot to send the image capturing command
Pand the recipe ID. -
Communication Component triggers Mech-Vision to switch the parameter recipe.
-
Communication Component triggers Mech-Vision to capture the image and perform recognition.
-
Mech-Vision returns the status code and the vision point to Communication Component after successful image capturing and recognition.
-
Communication Component returns the status code and the vision point (robot TCP) to the robot.
|
To facilitate the robot to pick workpieces, Communication Component converts the pose of the workpiece to pick to the robot TCP. |
Packet Format
The following table shows the packet format used for communication.
| Request Command | Workpiece ID | |
|---|---|---|
Sending (Robot → IPC) |
|
An integer, value range: 1–100 |
status code |
Vision Point (TCP) |
|
Receiving (IPC → Robot) |
An integer, value range: 0–4; 0-Normal recognition; 1-Illegal command; 2-Vision project not registered; 3-No vision points; 4-No point clouds |
6 floating-point values separated by comma (,) in the format of x,y,z,a,b,c |
|
The length of the response packet is fixed. If the status code in a response packet is a value from 1 to 4, the vision point data will be filled in with zeros (0). |
Packet Example
Request
P,1Normal response
0,1994.9217,-192.198,506.4646,-23.5336,-0.2311,173.6517|
This example indicates that Mech-Vision successfully recognizes the workpiece and returns the TCP: 1994.9217,-192.198,506.4646,-23.5336,-0.2311,173.6517. |
Abnormal response: Illegal command
1,0,0,0,0,0,0Abnormal response: Vision project not registered
2,0,0,0,0,0,0Abnormal response: No vision points
3,0,0,0,0,0,0Abnormal response: No point clouds
4,0,0,0,0,0,0Programming Guidelines
To fulfill project objectives, the Adapter example program has been written according to the following guidelines.
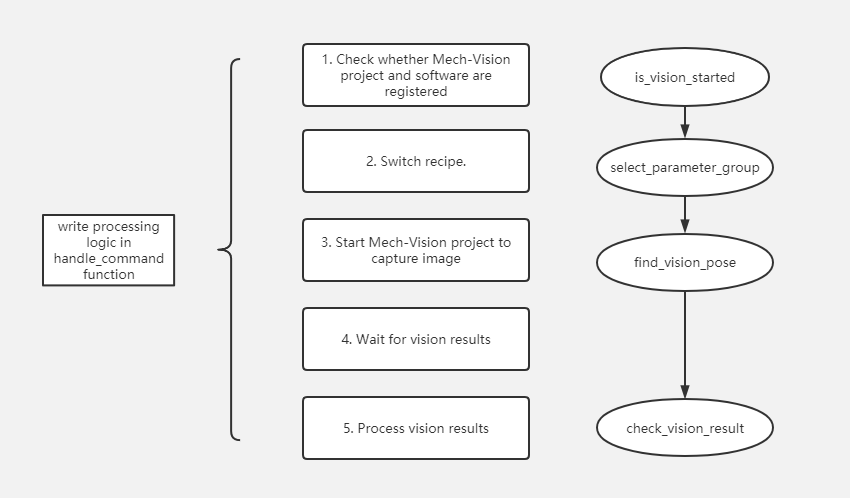
The preceding figure lists only the core packet processing logic. The next section will explain the Adapter example program in detail.
Explanations to the Example Program
|
You can download the Adapter example program here. |
Import Python packages
Import all modules depended by the Adapter program.
import json
import logging
import math
import sys
from time import sleep
import os
sys.path.append(os.path.abspath(os.path.join(os.path.dirname(__file__), "..", "..")))
from transforms3d import euler
from interface.adapter import TcpServerAdapter, TcpClientAdapter
from util.transforms import object2tcpDefine class
Define the sub-class “TestAdapter” that inherits the parent class “TcpServerAdapter”.
class TestAdapter(TcpServerAdapter):
vision_project_name = "Large_Non_Planar_Workpieces"
# vision_project_name = 'Vis-2StationR7-WorkobjectRecognition-L1'
is_force_real_run = True
service_name = "test Adapter"
def __init__(self, address):
super().__init__(address)
self.robot_service = None
self.set_recv_size(1024)|
This example defines the Adapter program as the TCP/IP Socket server. |
Set how to receive command and the packet processing logic
Set the processing logic of the received request, including the image capturing command and parameter recipe ID.
# Receive command _create_received_section
def handle_command(self, cmds):
photo_cmd, *extra_cmds = cmds.decode().split(',')
recipe = extra_cmds[0]
# Check command validity _check_cmd_validity_section
if photo_cmd != 'P':
self.msg_signal.emit(logging.ERROR, 'Illegal command: {}'.format(photo_cmd))
self.send(('1' + '' + '').encode())
return
# Check whether vision is registered _check_vision_service_section
if not self.is_vision_started():
self.msg_signal.emit(logging.ERROR, 'Vision not registered: {}'.format(self.vision_project_name))
self.send(('2' + '' + '').encode())
return
# Change TODO parameter "extra_cmds" according to actual conditions
sleep(0.1) # wait for a cycle of getting in Vision
# _check_vision_result_function_section
try:
result = self.select_parameter_group(self.vision_project_name, int(recipe) - 1)
if result:
result = result.decode()
if result.startswith("CV-E0401"):
self.send(('5' + '' + '').encode())
return
elif result.startswith("CV-E0403"):
self.send(('5' + '' + '').encode())
return
raise RuntimeError(result)
except Exception as e:
logging.exception('Exception happened when switching model: {}'.format(e))
self.send(('5' + '' + '').encode())
return
self.show_custom_message(logging.INFO, "Switched model for project successfully")
self.msg_signal.emit(logging.WARNING, 'Started capturing image')
try:
self.check_vision_result(json.loads(self.find_vision_pose().decode()))
except Exception as e:
self.msg_signal.emit(logging.ERROR, 'Calling project timed out. Please check whether the project is correct: {}'.format(e))
self.send(('2' + '' + '').encode())|
The “handle_command” function is the start point for the TCP/IP Socket server to process received packets. |
Define the check of Mech-Vision vision results
Set the Adapter to check the vision results output by Mech-Vision.
# Check vision results
def check_vision_result(self, vision_result, at=None):
noCloudInRoi = vision_result.get('noCloudInRoi', True)
if noCloudInRoi:
self.msg_signal.emit(logging.ERROR, 'No point clouds')
self.send(('4' + '' + '').encode())
return
poses = vision_result.get('poses')
labels = vision_result.get('labels')
if not poses or not poses[0]:
self.msg_signal.emit(logging.ERROR, 'No visual points')
self.send(('3' + '' + '').encode())
return
self.send(self.pack_pose(poses, labels).encode())
self.msg_signal.emit(logging.INFO, 'Sent TCP successfully')Set the output format of vision points
Set the output format of the vision points.
# Pack pose _pack_pose_section
def pack_pose(self, poses, labels, at=None):
pack_count = min(len(poses), 1)
msg_body = ''
for i in range(pack_count):
pose = poses[i]
object2tcp(pose)
t = [p * 1000 for p in pose[:3]]
r = [math.degrees(p) for p in euler.quat2euler(pose[3:], 'rzyx')]
p = t + r
self.msg_signal.emit(logging.INFO, 'Sent pose: {}'.format(p))
msg_body += ('{:.4f},' * (len(p) - 1) + '{:.4f}').format(*p)
if i != (pack_count - 1):
msg_body += ','
return '{},'.format(0) + msg_body + ''Define the close operation of Adapter
Define how to close Adapter.
def close(self):
super().close()