通过添加位姿来添加抓取点
抓取点代表物体上可以被机器人抓取的位置。 这个点位于物体坐标系下,其位置和方向是相对于物体的。 机器人需要 Mech-Vision 提供一个抓取位姿(抓取时的机器人工具位姿)才能进行抓取,而该抓取位姿是从目标物体上的抓取点变换而来的。 因此,需要为点云模板添加抓取点,Mech-Vision 才能通过匹配处理生成目标物体的抓取点,进而输出实际的抓取位姿。
|
用户添加的第一个抓取点会被默认设为“几何中心点”,以下内容为关于“几何中心点”的说明。
|
-
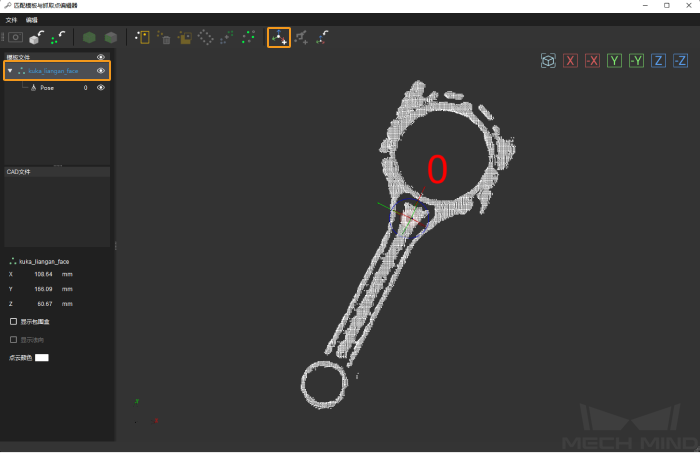
在模板文件列表中选中要为其添加抓取点的点云模板,再单击工具栏中的
 ,即可添加一个位姿,此位姿即为抓取点。
,即可添加一个位姿,此位姿即为抓取点。
|
通过 |
-
在模板文件列表中选中该抓取点,即可对其进行调整。有两种方式调整抓取点:
-
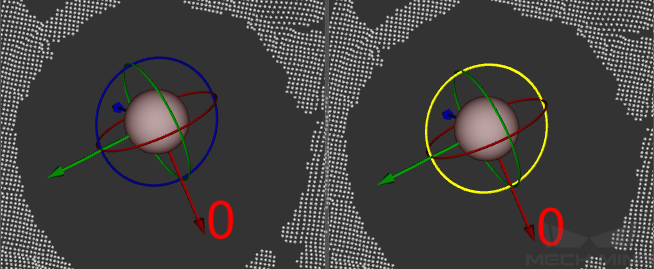
通过拖拽抓取点上的拖拽器来调整:
按住Ctrl键的同时,单击选中一个拖拽器并拖拽,即可沿该拖拽器的方向调整抓取点。单击后拖拽器的颜色变为黄色,说明该拖拽器被选中。下图中,左侧为选中前,右侧为选中后。
-
通过编辑位姿数据来调整:
在CAD 文件列表下方可以进行位姿编辑,请参阅 位姿编辑组件 。
-
-
设置完成后,依次单击 (快捷键Ctrl + S) ,点云模板与抓取点将保存到工程文件夹/resource/3d_matching路径下。
-
xxx.ply 为模板点云文件
-
geo_center.json 为模板几何中心点位姿文件
-
pick_points.json 为抓取点位姿文件
-
pick_points_labels.json 为抓取点位姿的标签文件
-
|
关闭该工具窗口时,无论是否已保存文件,均会弹窗提示是否进行保存。 |