YASKAWA自动标定
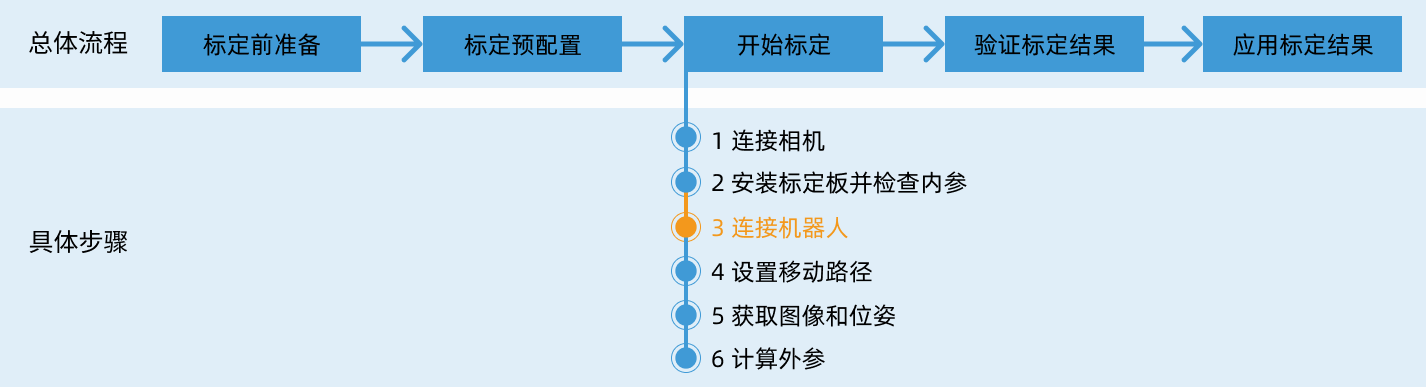
在标准接口通信配置完成后,用户可连接机器人进行自动标定。自动标定的总体流程如下图所示。
特别注意
在执行标定流程时,当执行到连接机器人,且Mech-Vision软件界面出现等待机器人连接中…按钮时,用户需按照本文以下的步骤在机器人端进行操作,操作完成后,再接着在Mech-Vision软件中执行剩余的步骤。
|
1. 选择和修改标定程序
-
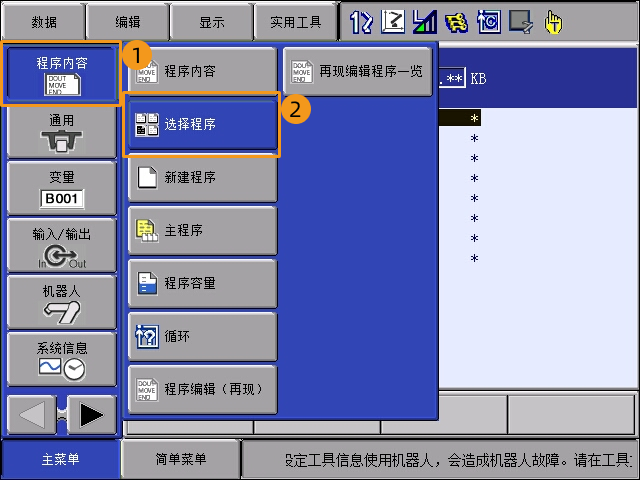
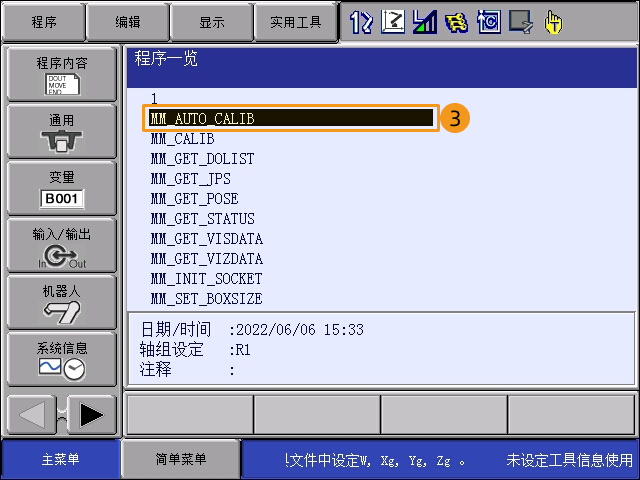
机器人处于示教模式下时,依次点击示教器屏幕,将光标移动至标定程序MM_AUTO_CALIB。
-
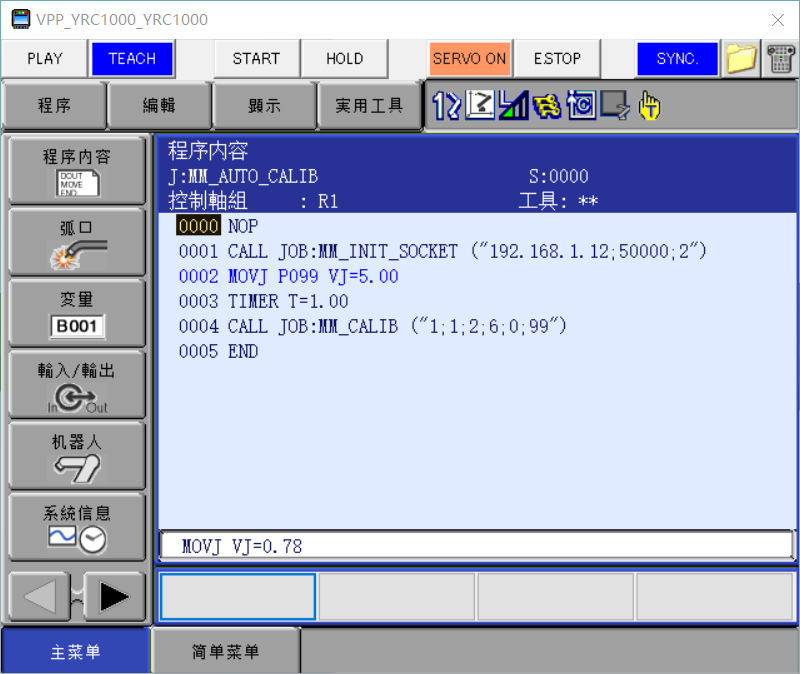
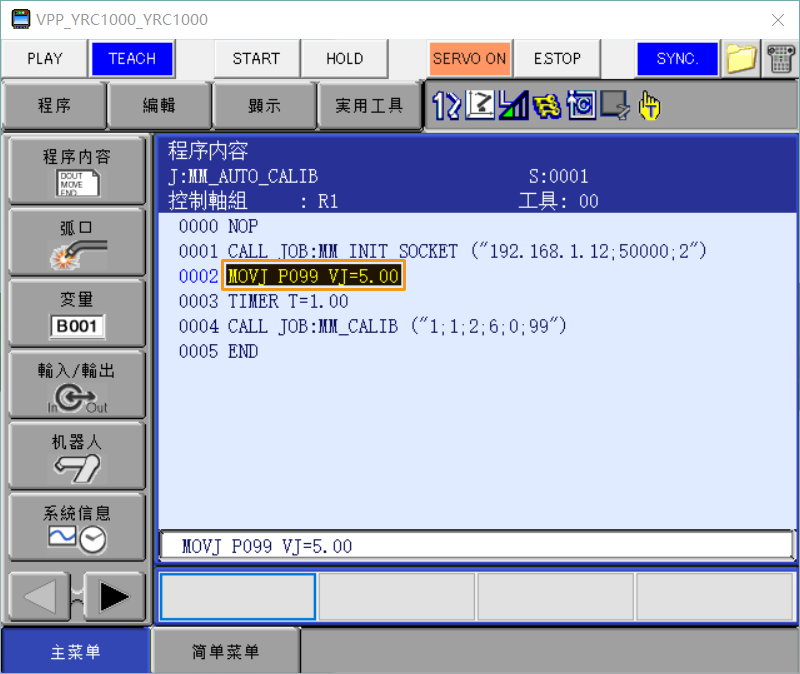
选中该程序文件后,按下示教器上的选择键,进入如下界面。
-
选中0001行内容,并在右下方出现的内容中选中IP地址和端口号,按下回车键,进入更改界面。
-
将IP地址修改为工控机IP地址。若Mech-Vision中主机端口号更改,此处的50000端口号也需更改,需要与Mech-Vision中设置的主机端口号保持一致。修改完成后,按两次示教器右下角的回车键,即可返回程序内容界面。
2. 示教标定起始点
-
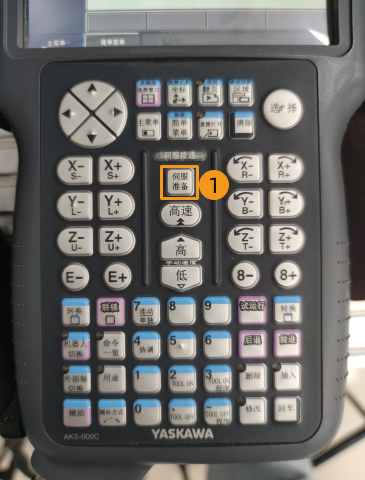
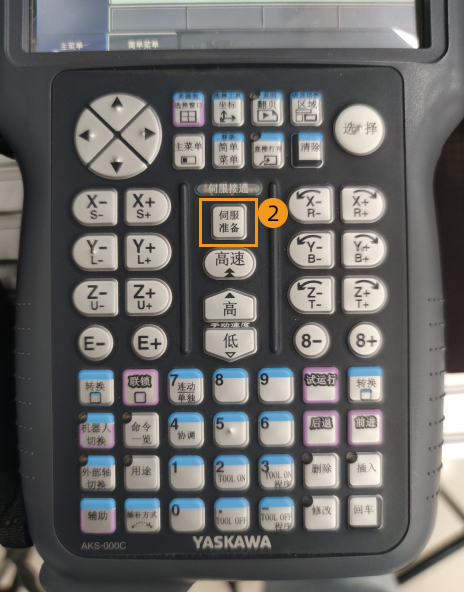
按下示教器伺服准备键后,手握示教器后方伺服使能开关,将机器人手动移动到标定起始点位置。
标定起始点位置可以直接选用在检查标定板位置和点云质量时机器人所处的位置。

-
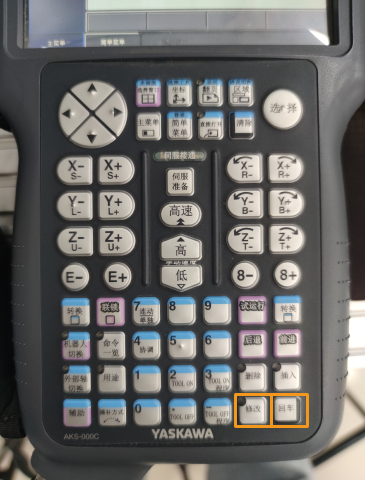
将光标移动至MOVJ P099 VJ=5,按下示教器直接打开键。
-
按下示教器的伺服准备键后,一只手按住示教器后方的伺服使能开关(需等待另一只手操作完成后再松开),另一只手依次按下修改键和回车键,将位置型变量P099修改为当前位置,并确保P099变量的数据形式为机器人,工具处为00。
-
若P099变量存储法兰位姿或工具位姿,则P099变量的数据形式需设置为机器人。
-
若P099变量存储关节角,则P099变量的数据形式需设置为关节或脉冲。
-
00号工具的X、Y、Z、Rx、Ry、Rz值需提前设置为0。

-
-
再次按下示教器直接打开键,返回程序内容界面。
3. 运行标定程序
-
首先将光标移动至标定程序首行,将示教器钥匙拧至中间档位,使机器人切换到再现模式,然后按下示教器伺服准备键。

如需调节速度,以便低速运行,请按照以下步骤进行操作。
-
在示教器界面中,依次点击,将光标移动至标定程序MM_AUTO_CALIB,然后按下示教器上的选择键。
-
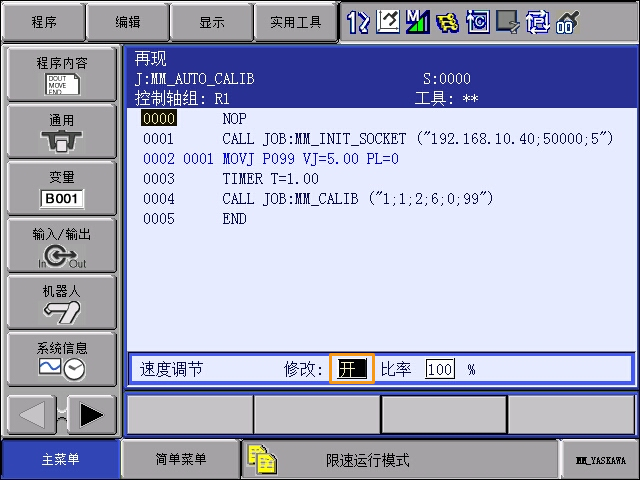
依次点击,然后选中底部速度调节栏。
如果未选中底部速度调节栏,则无法对速度调节栏中参数进行修改。 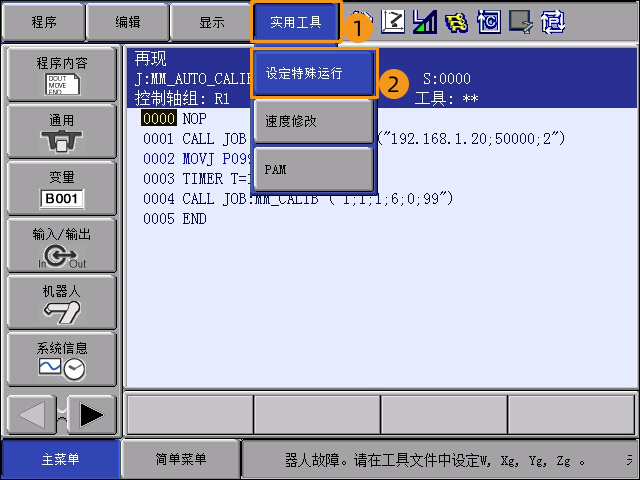

-
在速度调节栏中,先选中关,然后按示教器上的选择键,便可将关切换至开。
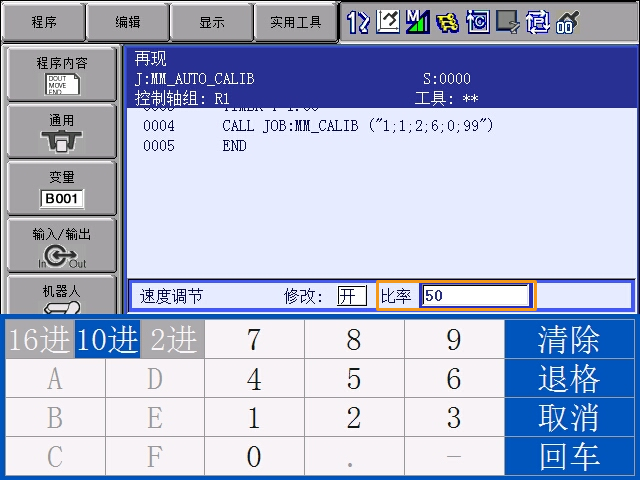
-
接下来调节比率值。先选中比率后的数值,然后按示教器上的选择键,进入速度数值修改界面。输入数值后,按示教器上的回车键,便可完成对速度的修改。
-
最终,速度修改完成后的界面如下图所示。
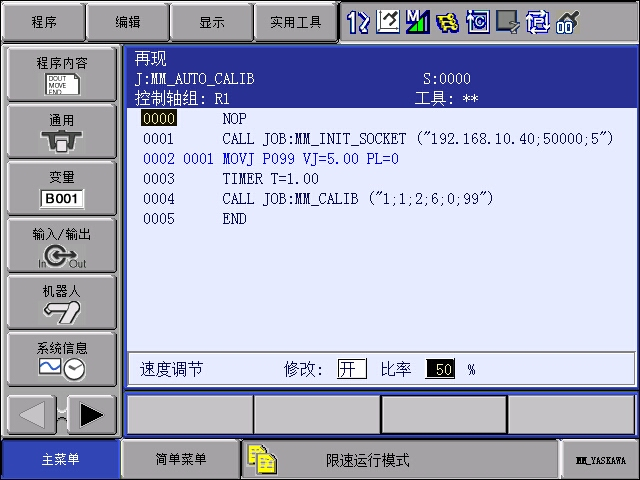
-
-
随后按下示教器上方绿色启动键,当启动按钮灯亮时,说明机器人开始运行。
如果运行中有异常,请立即按下暂停或急停键。 
-
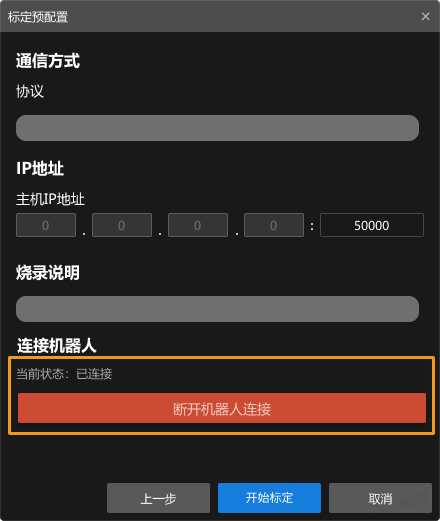
观察Mech-Vision中标定窗口,在连接机器人区域显示“已连接”状态信息后,且按钮由等待机器人连接中…变为断开机器人连接,单击底部栏中的下一步按钮。
-
请分别参考如下链接,接着执行开始标定中的第四步(设置移动路径)以及后续流程。