FANUC标准接口通信配置
本节介绍如何将机器人标准接口程序烧录到FANUC机器人,并完成梅卡曼德视觉系统与机器人的标准接口通信配置。
| 标准接口程序烧录是将机器人标准接口程序及配置文件导入到机器人系统中,从而建立视觉系统与机器人的标准接口通信。 |
烧录前准备
检查硬件和软件版本
|
本文所列的型号与版本是适配时所用的型号与版本。对于其他型号与版本,用户可参考本文尝试操作,若遇到问题,请联系梅卡曼德技术支持。 |
-
FANUC机器人系统版本:V7.5、V7.7、V8.x、V9.x或V10.1。
单击查看操作方法
-
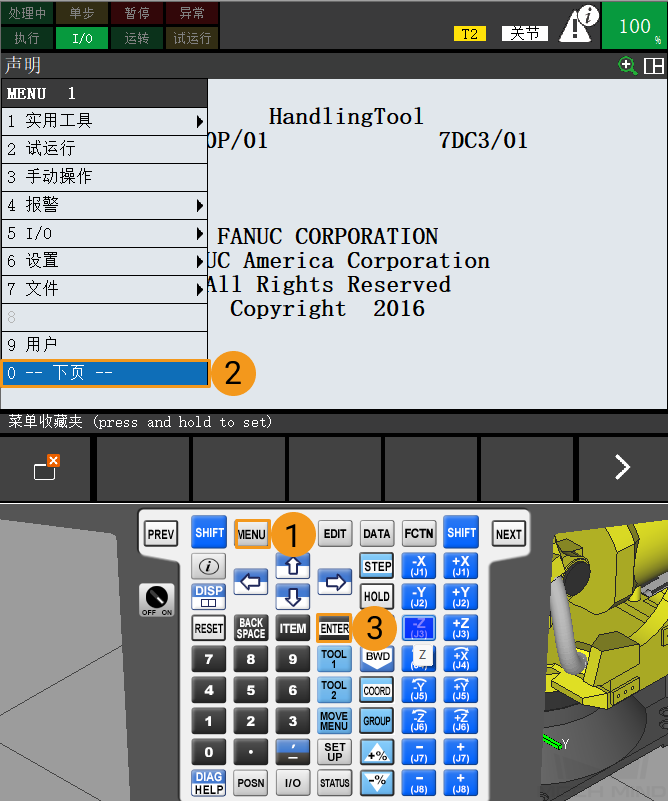
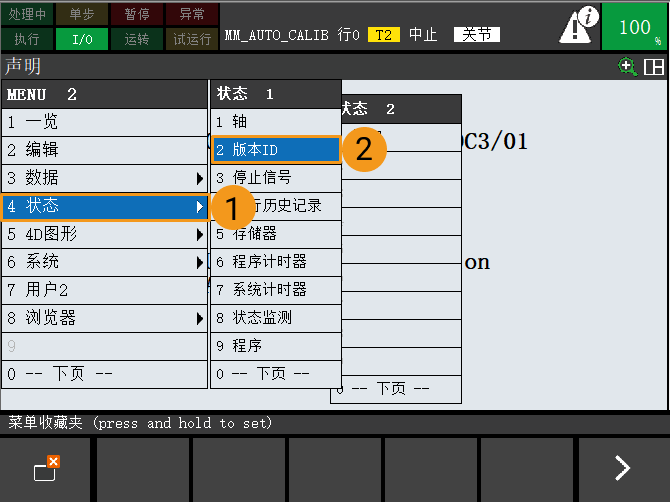
在示教器上,按MENU键,使用方向键依次选择,然后按ENTER键。

-
在声明界面,图中框选的部分就是机器人控制器的系统版本。

-
-
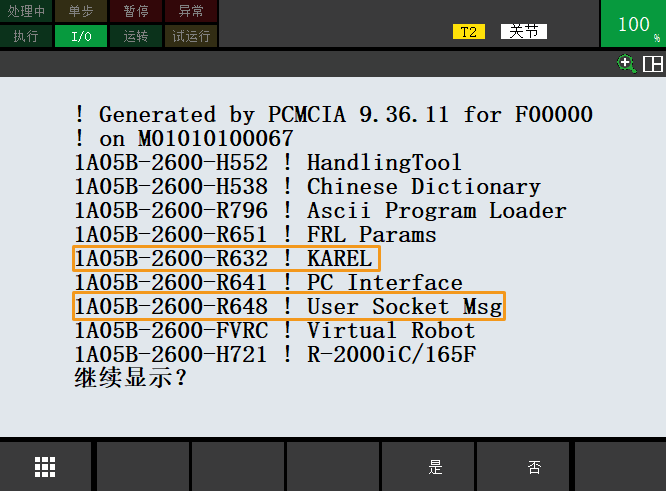
确认FANUC机器人已安装所需软件包:
-
R651 或 R632(KAREL),安装其中一个即可
-
R648(User Socket Msg)
单击查看操作方法
-
在示教器上,按MENU键,使用方向键选择下页,然后按ENTER键。
-
使用方向键依次选择,然后按ENTER键。
-
按NEXT键,然后按F3键(即选择订购文件)。

-
在如下界面,确认已安装所需软件包。
-
建立网络连接
设置IP地址
-
将机器人切换至手动模式:示教器上钥匙开关转至ON,控制柜上旋钮旋转至T1或T2。
T1是低速模式,T2是高速模式,建议初学者使用T1模式。本文以T2模式为例。 

-
在示教器上,按MENU键,使用方向键依次选择,然后按ENTER键,进入设置协议界面。

-
使用方向键选中TCP/IP,按F3键(即选择详细),进入设置主机通信界面。

-
根据网线插入的网口不同,请选择如下不同的操作。
若同时启用端口1和端口2,两者IP地址需位于不同网段。 -
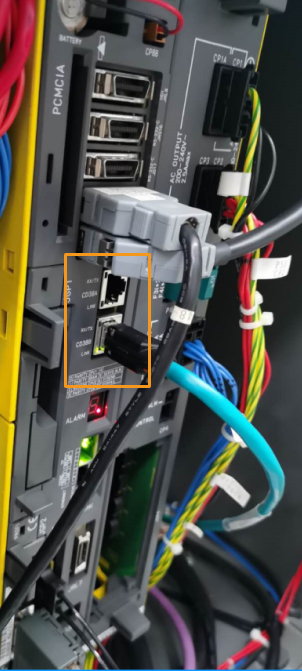
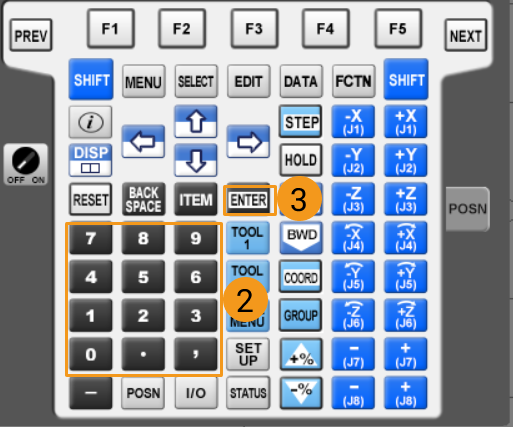
若网线插在CD38A网口(对应端口1,如下图所示),使用方向键选择IP地址,按ENTER键,使用示教器键盘输入机器人IP地址(机器人IP地址需与工控机IP地址在同一网段,但两者并不相同),最后按ENTER键。

-
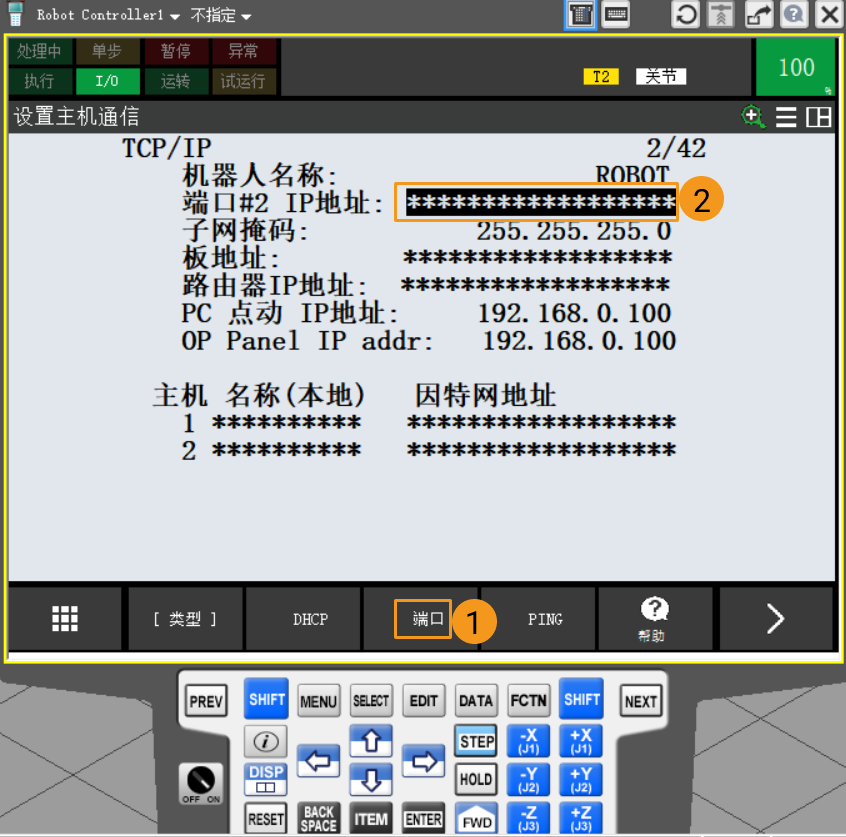
若网线插在CD38B网口(对应端口2),按F3键(即选择端口)切换至端口2,使用方向键选择IP地址,按ENTER键,使用示教器键盘输入机器人IP地址(机器人IP地址需与工控机IP地址在同一网段,但两者并不相同),最后按ENTER键。
-
-
在工控机上,设置工控机IP地址。
工控机IP地址需与机器人IP地址位于同一网段,即两者IP地址的网络部分和子网掩码需相同,例如192.168.100.169/255.255.255.0和192.168.100.170/255.255.255.0位于同一网段。
备份机器人文件
-
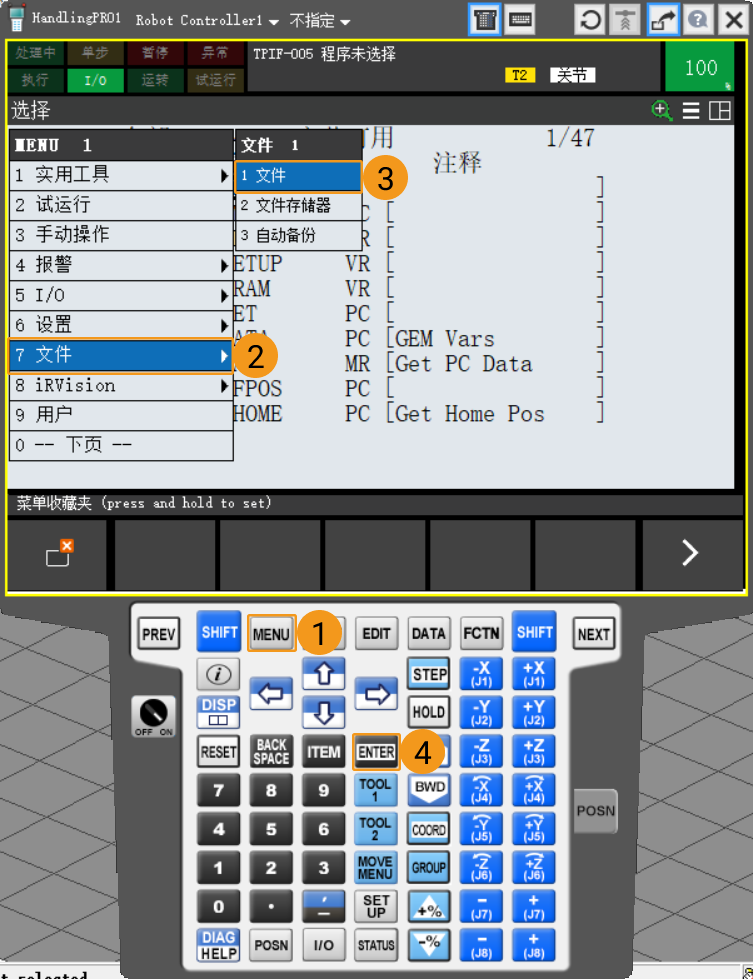
插入U盘,按MENU键,使用方向键依次选择,然后按ENTER键,进入文件界面。
-
请确保所使用的U盘容量不大于32G,且U盘的文件系统格式为FAT32。
-
U盘可插入控制柜或示教器中,请根据实际情况选择。
-
-
在文件界面,按F5键(即选择工具),使用方向键选择切换设备,按ENTER键。

-
根据U盘插入的设备不同,请选择如下不同的操作。
-
若U盘插入控制柜,使用方向键选择USB盘(UD1:),按ENTER键。
-
若U盘插入示教器,使用方向键选择TP上的USB(UT1:),按ENTER键。

-
-
在文件夹界面,按F5键(即选择工具),使用方向键选择创建目录,然后按ENTER键。

-
请根据需要选择单词、大写、小写或其他/键盘,按F1~F5键,输入文件夹名称(以AOA为例),按ENTER键,完成后进入该文件夹。

-
按F4键(即选择备份),使用方向键选择以上所有,按ENTER键,开始备份文件。

-
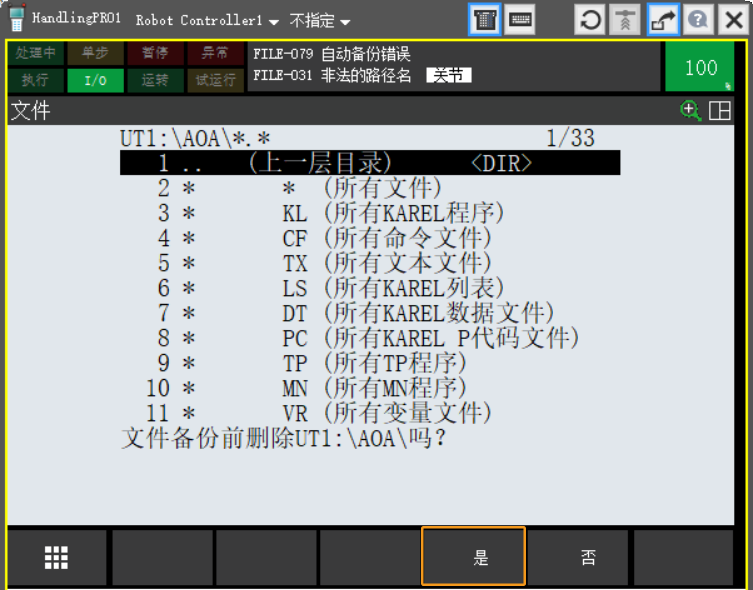
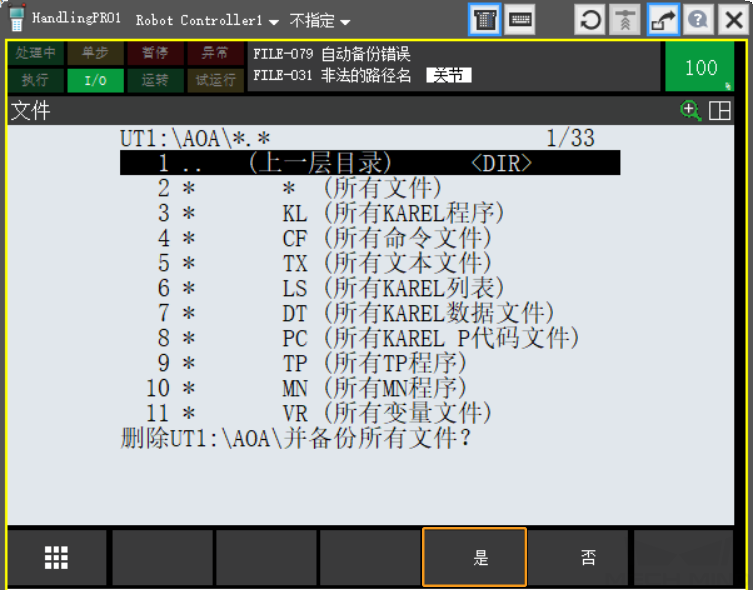
开始备份后出现删除提示,按F4键(即选择是),删除新建文件夹的内容。确认后,出现备份文件提示,按F4键(即选择是),开始备份机器人文件。
-
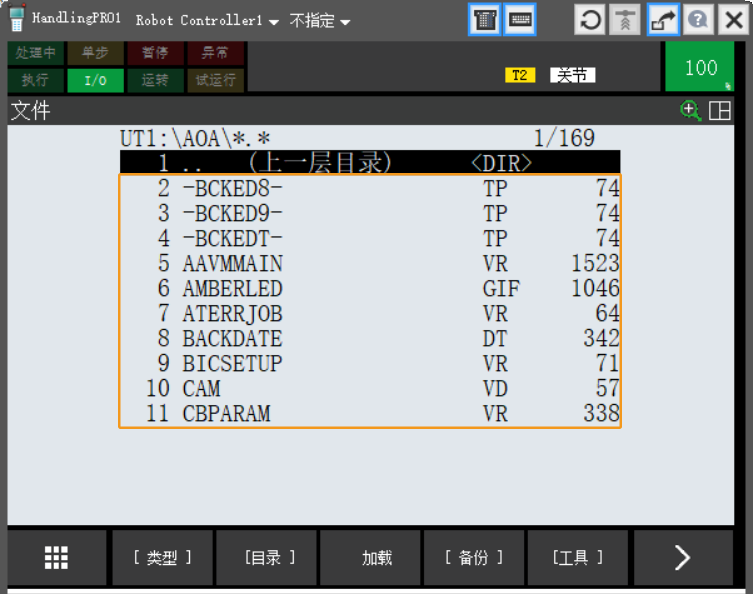
备份完成后,使用方向键选择所有文件,按ENTER键,可查看已备份文件。

设置“机器人通信配置”
-
打开Mech-Vision软件。根据出现的界面不同,选择如下相应方法创建方案。
-
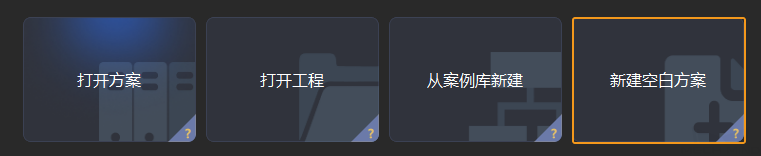
若出现欢迎界面,单击新建空白方案,即可新建空白方案。
-
若出现主界面,依次单击菜单栏中,即可新建空白方案。
-
-
单击 Mech-Vision 工具栏中 机器人通信配置 。
-
在 机器人通信配置 窗口,进行如下配置。
-
单击 选择机器人 下拉框,选择 品牌机器人,然后单击 选择机器人型号,选择具体机器人型号,单击 下一步。
-
在 通信方式 下,接口服务类型 选择 标准接口 ,协议 选择 TCP Server,协议格式 根据机器人系统版本进行选择。
-
若机器人系统版本为V7、V8或V9,协议格式 选择 HEX(big-endian)。
-
若机器人系统版本为V10,协议格式 选择 HEX(little-endian)。
-
-
设置端口号,且确保设置的端口号未被其他程序占用。
-
在 烧录说明 下,单击 打开烧录程序文件夹。
后续烧录的文件将从此文件夹复制,请勿关闭文件夹窗口。 -
(可选)建议勾选 方案打开时自动打开接口服务。
-
单击 应用。
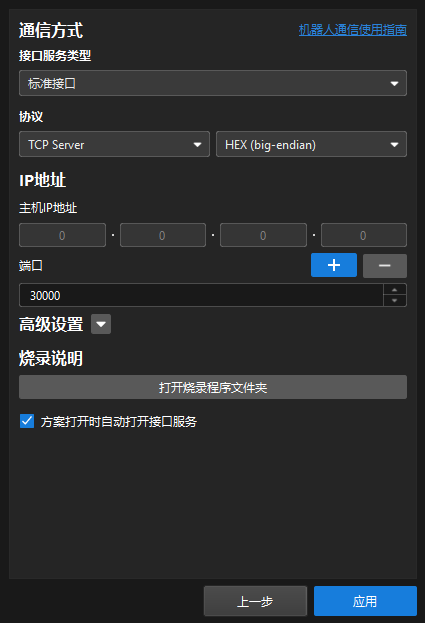
图中以是以V7、V8或V9机器人系统为例。若机器人系统版本为V10,请将 HEX(big-endian) 修改为 HEX(little-endian)。 -
-
在 Mech-Vision 主界面,确认工具栏中的接口服务已开启。

准备烧录文件
-
将U盘插入工控机的USB端口。
请确保所使用的U盘容量不大于32G,且U盘的文件系统格式为FAT32。
-
在工控机上,在打开的烧录程序文件夹(
FANUC文件夹)中,将其中所有文件及子文件夹复制到U盘根目录,最后安全拔出U盘。-
烧录程序文件夹也可在Mech-Vision和Mech-Viz软件安装目录下的
Communication Component/Robot_Interface/FANUC路径中找到。 -
请确保所使用的U盘容量不大于32G,且U盘的文件系统格式为FAT32。
-
请勿将外层
FANUC文件夹复制到U盘根目录下。 -
复制的所有文件及子文件夹必须放在U盘根目录下,不可嵌套,不可重命名。
-
烧录文件至机器人中
-
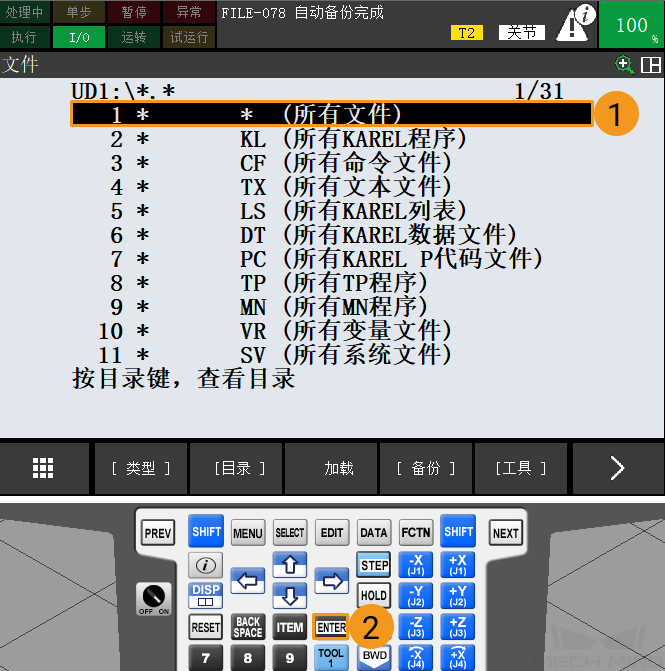
插入U盘,按MENU键,使用方向键依次选择,然后按ENTER键,进入文件界面。
U盘可插入控制柜或示教器中,请根据实际情况选择。

-
按F5键(即选择工具),使用方向键选择切换设备,按ENTER键。

-
根据U盘插入的设备不同,请选择如下不同的操作。
-
若U盘插入控制柜,使用方向键选择USB盘(UD1:),按ENTER键。
-
若U盘插入示教器,使用方向键选择TP上的USB(UT1:),按ENTER键。

-
-
使用方向键选择所有文件,然后按ENTER键,可查看U盘根目录文件。
-
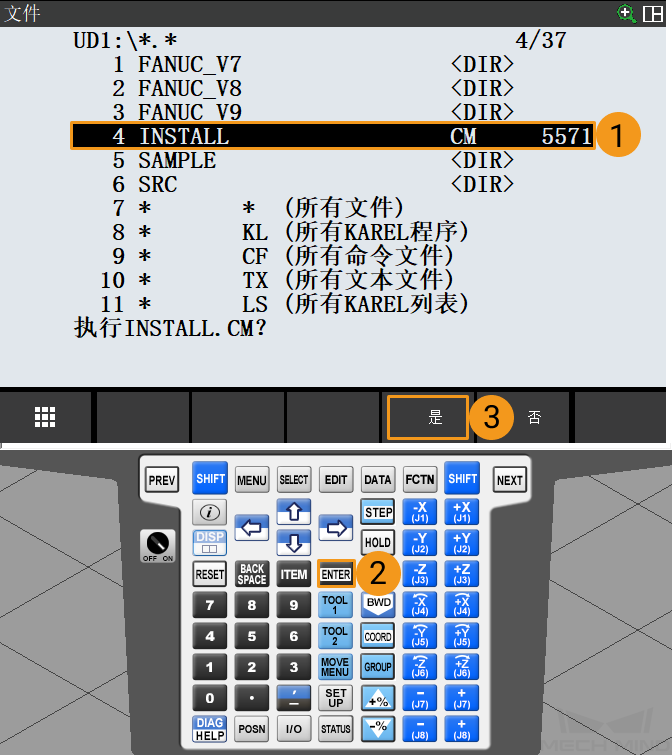
在U盘根目录文件下,使用方向键选择INSTALL,按ENTER键,然后按F4键(即选择是),便可开始执行烧录程序。
-
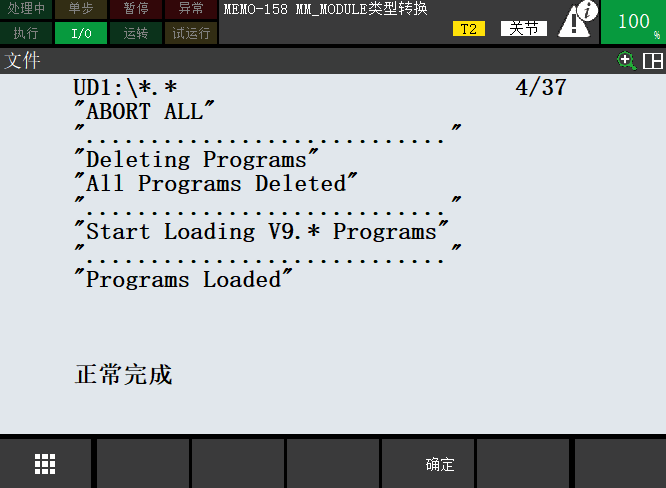
当出现如下信息(Programs Loaded)时,表示烧录成功。按F4键(即选择确定),返回上一界面。
测试标准接口通信
选择和修改通信测试程序
-
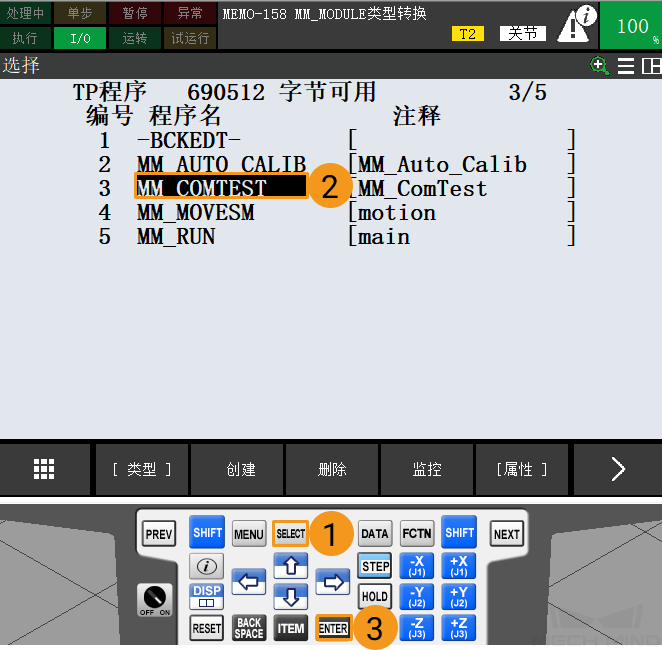
按SELECT键,进入程序选择界面,使用方向键选择MM_COMTEST,按ENTER键,打开程序文件。
-
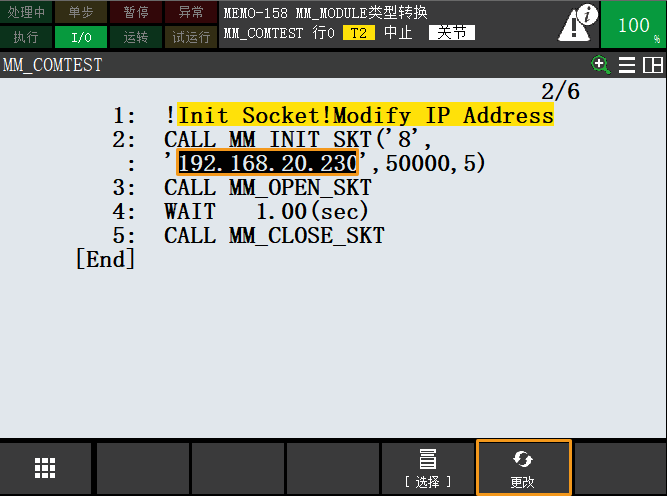
在MM_COMTEST程序页面中,设置MM_INIT_SKT指令的参数。该指令共有4个参数,使用方向键选中某个参数,按F5键(即选择 更改)根据实际情况设置。
-
参数 1:机器人端口号(选择机器人端口号1~8中的一个即可)。
-
参数 2:工控机IP地址。
-
参数 3:工控机服务端口号,与Mech-Vision中设置的主机端口号保持一致。
-
参数 4:超时等待时间(单位为min)。
-
运行通信测试程序
-
将机器人切换至手动模式:示教器上钥匙开关转至ON,控制柜上旋钮旋转至T1或T2。
-
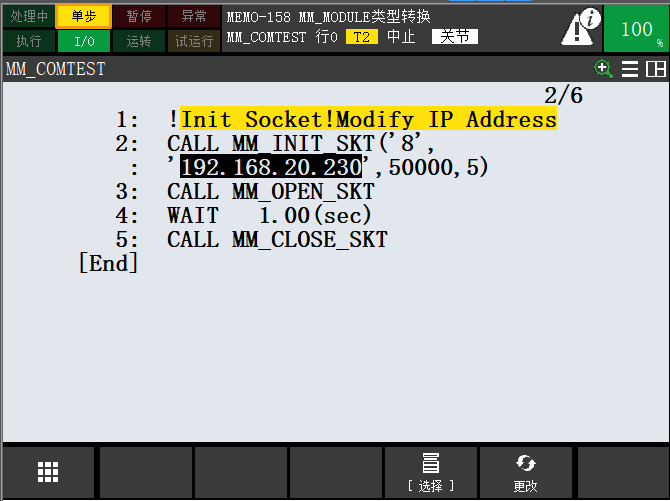
在示教器界面,按STEP键,机器人切换至单步运行模式,此时示教器显示屏上的单步变为黄色。

-
按住示教器背部的使能开关(任一均可)。

-
按住 SHIFT,同时不断按下 FWD,以手动单步运行MM_COMTEST程序。当出现如下信息(“MM:Restart Robot”)时,重启机器人。
在第一次修改机器人端口号(1~8)后,机器人需要重启后才生效。 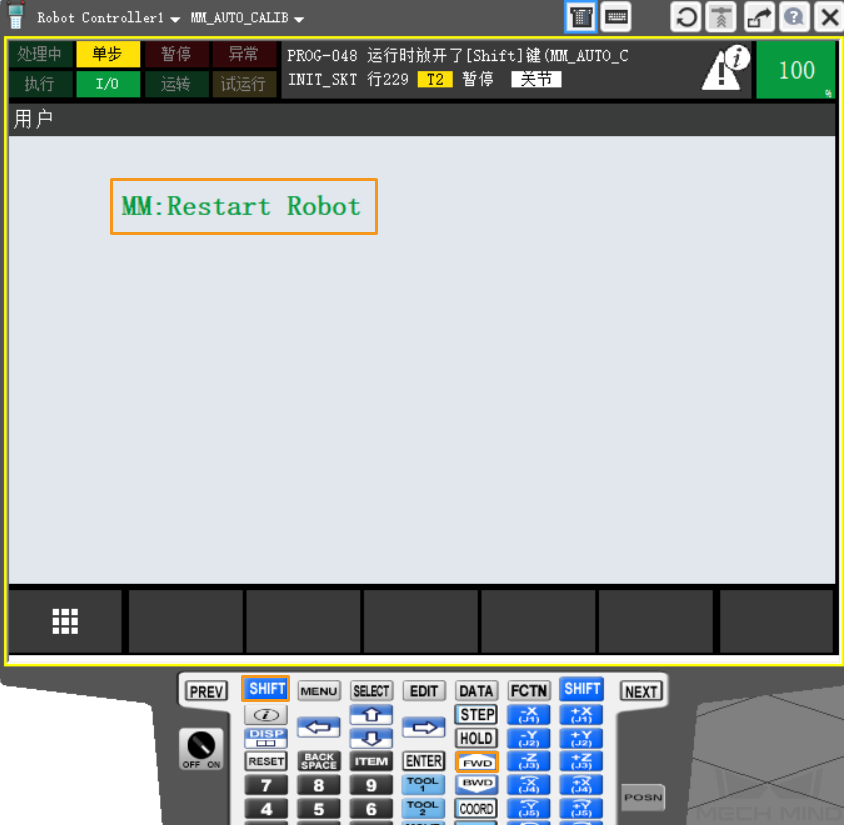
-
重启机器人后,再次选择并打开MM_COMTEST程序,然后按住SHIFT,同时不断按下FWD,以手动单步运行MM_COMTEST程序。
-
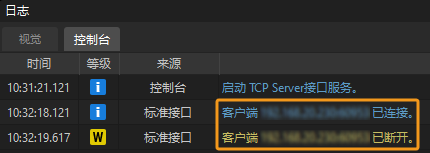
若机器人与视觉系统间的通信连接成功,则Mech-Vision日志窗口的控制台标签页下会出现相关提示。