使用 CRX 插件进行自动标定
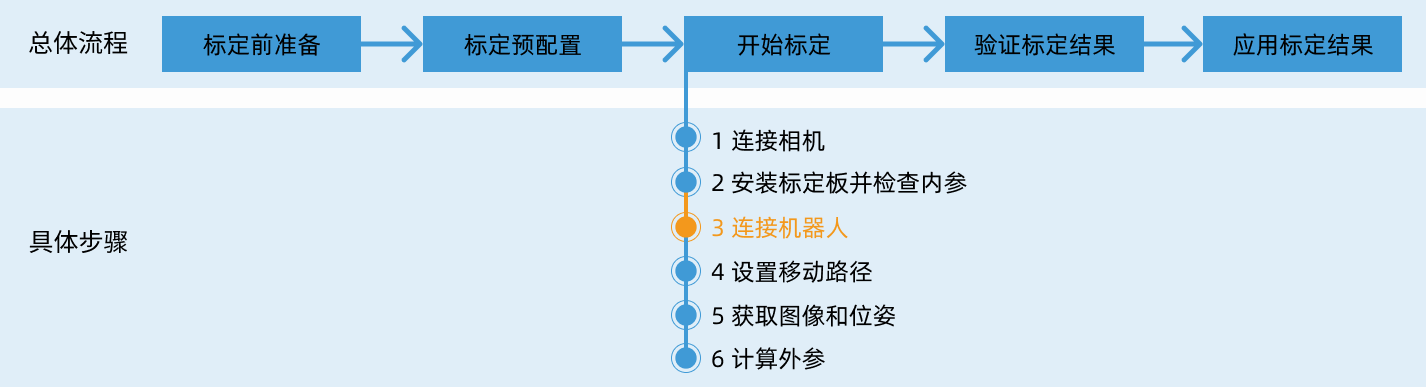
在标准接口通信配置完成后,用户可连接机器人进行自动标定。自动标定的总体流程如下图所示。
特别注意
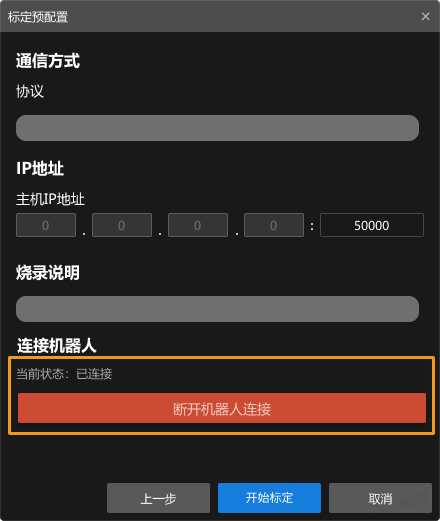
在执行标定流程时,当执行到连接机器人,且Mech-Vision软件界面出现等待机器人连接中…按钮时,用户需按照本文以下的步骤在机器人端进行操作,操作完成后,再接着在Mech-Vision软件中执行剩余的步骤。
|
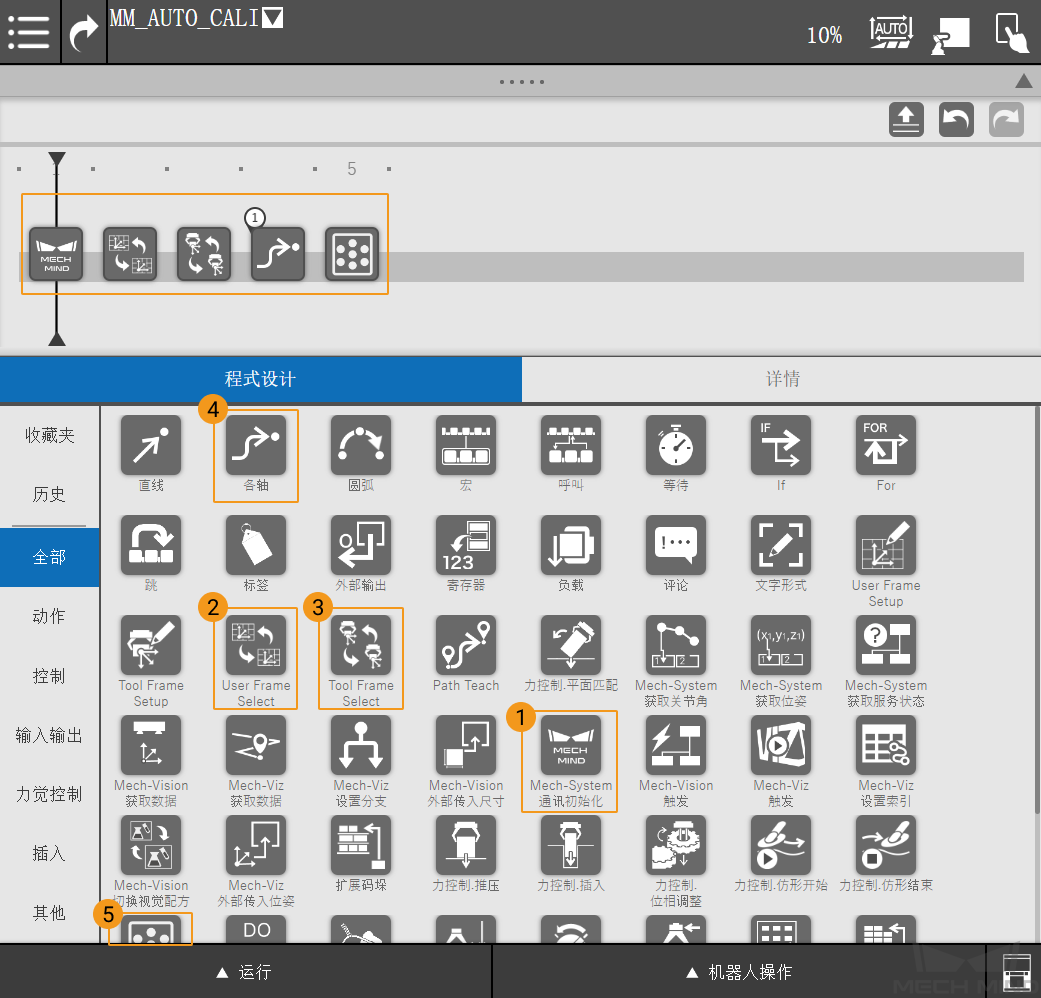
1. 创建标定程序
-
新建一个机器人程序(本示例名称为 MM_AUTO_CALI),选择 程式设计 ,从左侧 全部 指令列表中依次拖入以下指令:Mech-System 通讯初始化、User Frame Select(选择用户坐标系)、Tool Frame Select(选择工具坐标系)、各轴(移动)、Mech-Eye 相机标定。
-
单击 Mech-System 通讯初始化 ,进入该指令的详情页面。将此处的 IPC 的 IP 地址 设置为工控机 IP,将 IPC 端口 设置为 Mech-Vision 中配置的端口号。

-
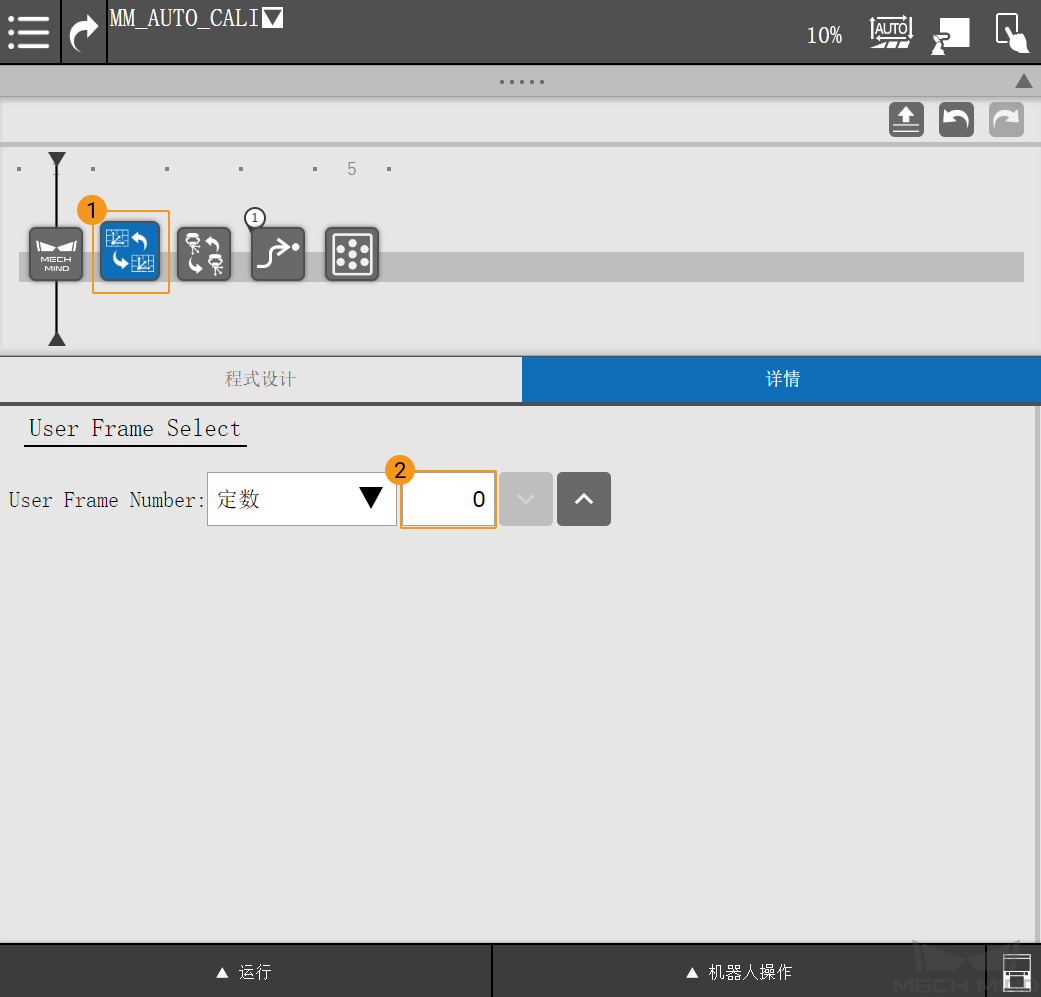
单击 User Frame Select ,选择 0 号用户坐标系(User Frame)。
-
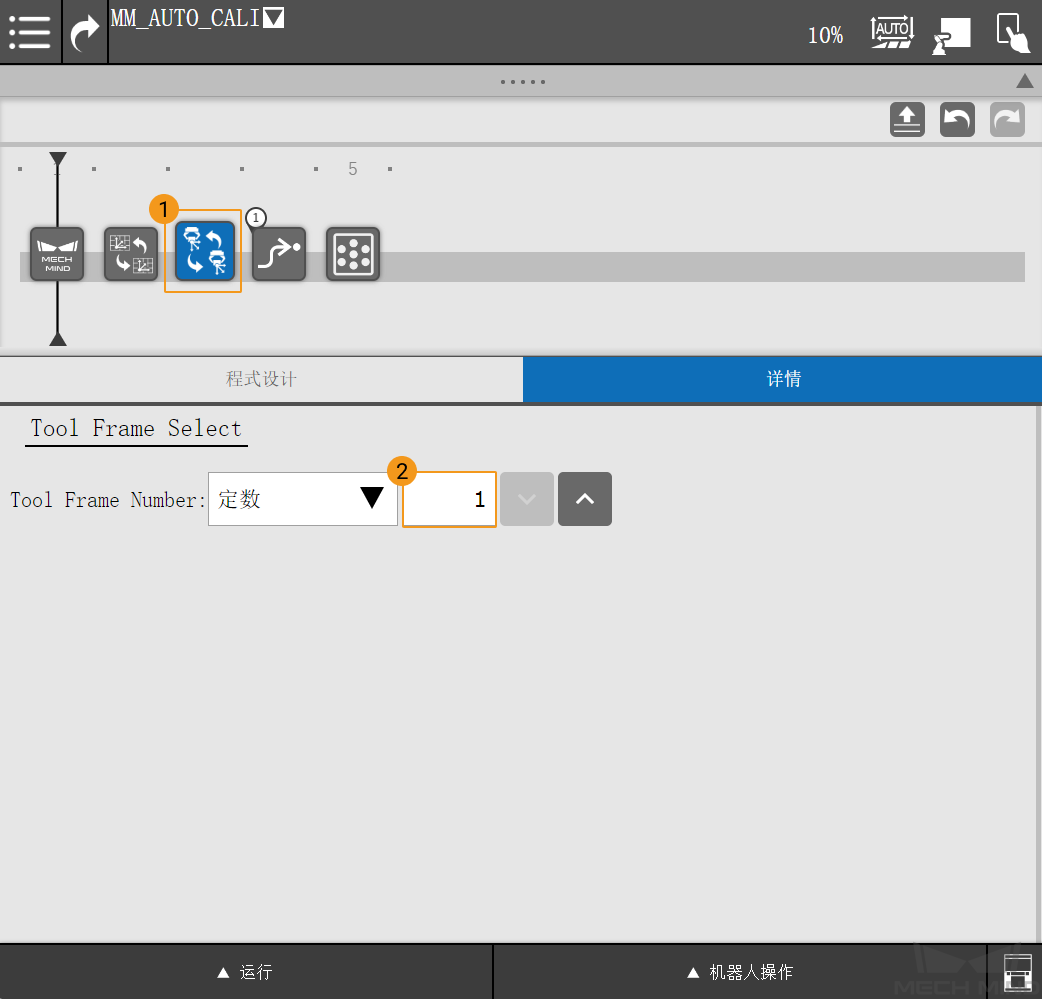
单击 Tool Frame Select ,选择 1 号工具坐标系(Tool Frame)。
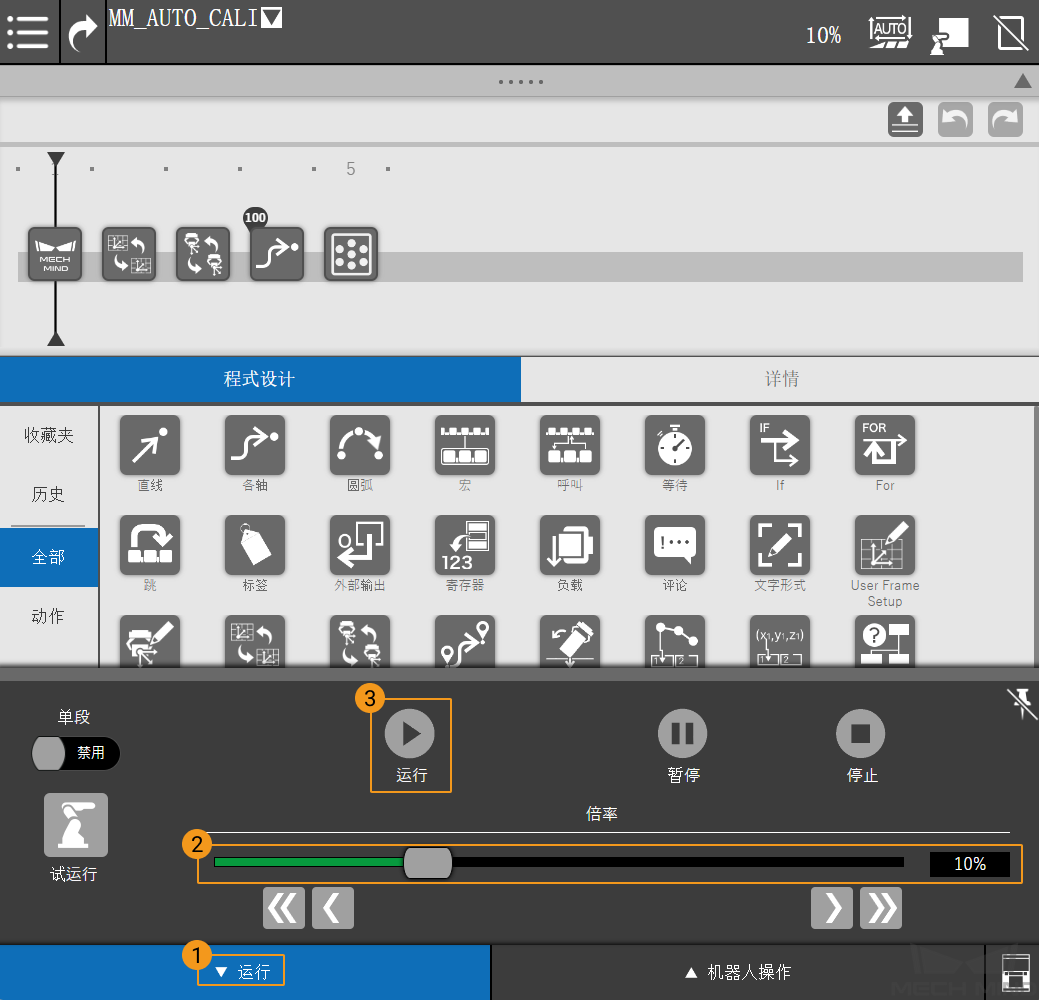
2. 示教标定起始点
-
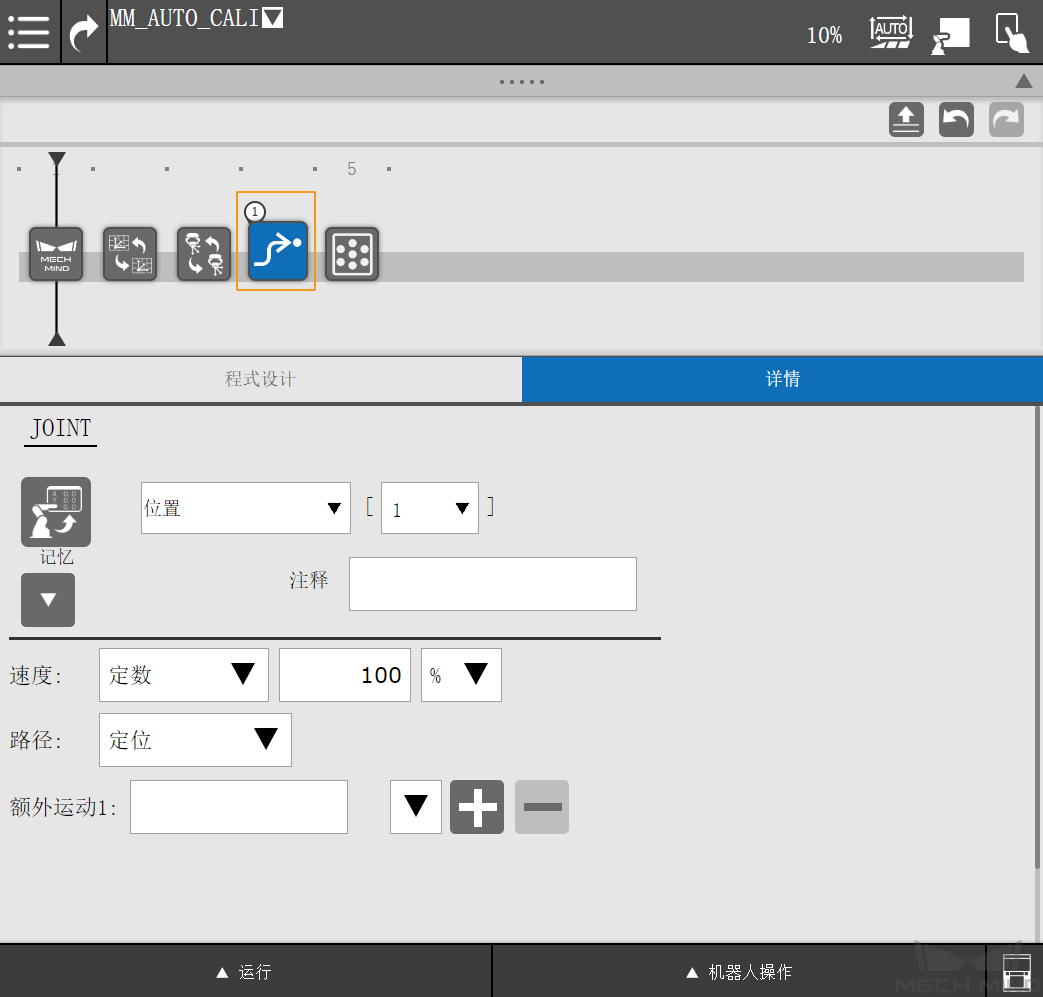
单击 各轴 移动。
-
手动移动机器人到标定起始点位置。
标定起始点位置可以直接选用在检查标定板位置和点云质量时机器人所处的位置。
-
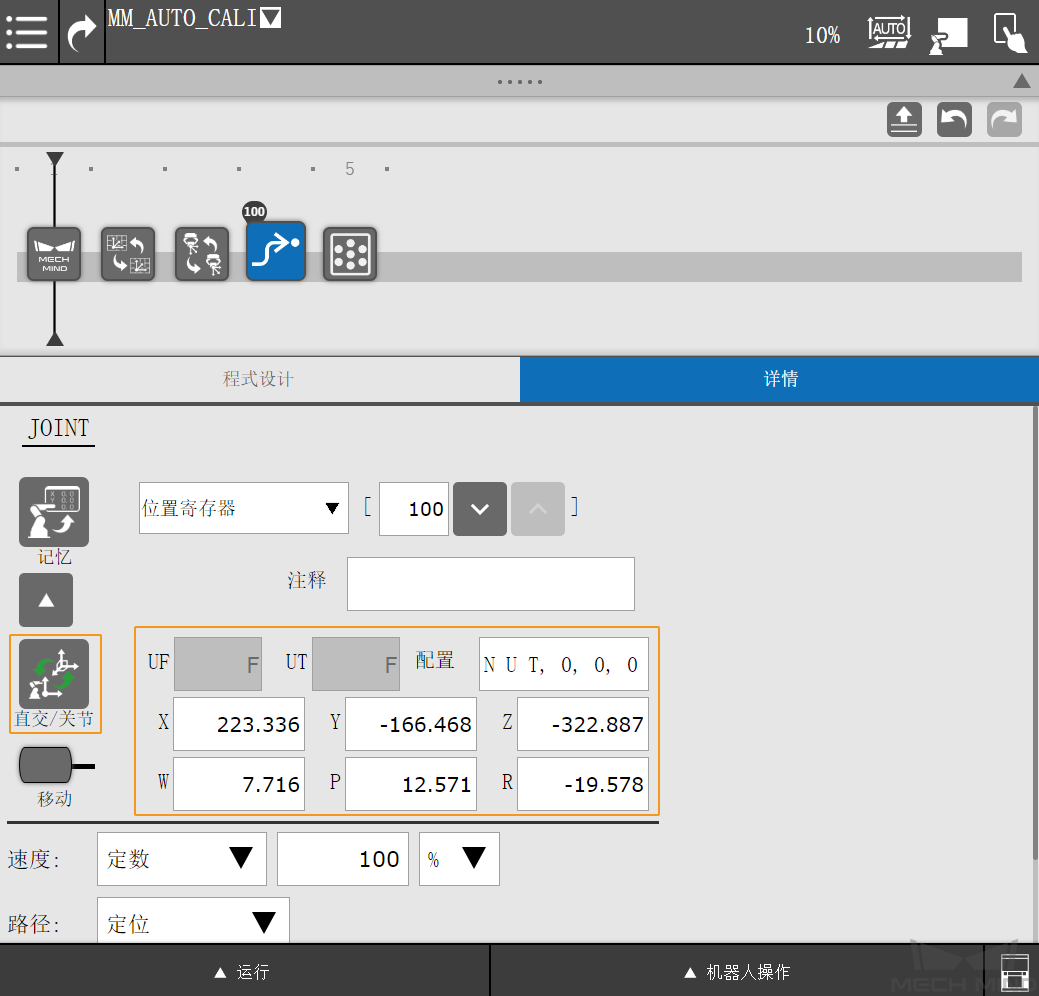
选择 位置寄存器 ,输入寄存器编号(本示例使用寄存器 100)。单击
 ,显示 直交/关节 按钮。
,显示 直交/关节 按钮。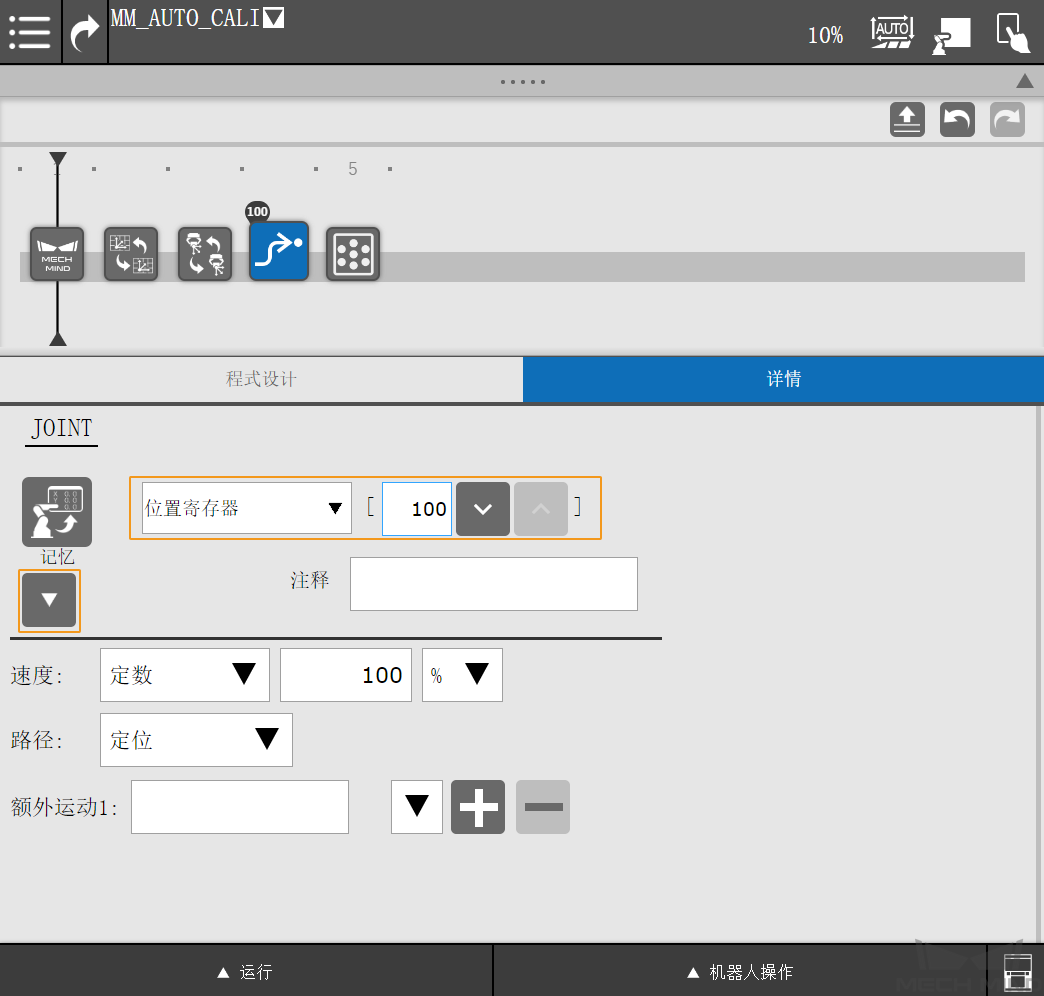
-
单击 直交/关节 ,切换至直交。
-
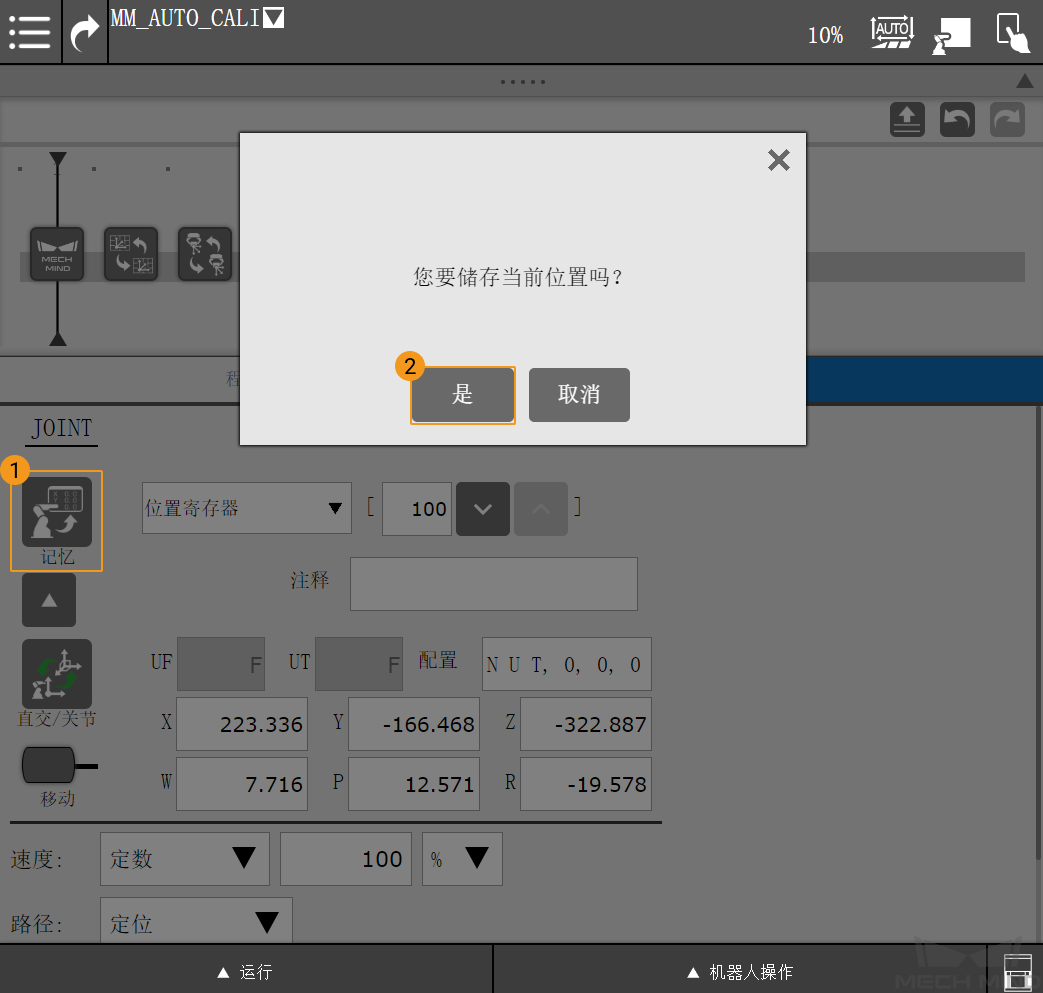
单击 记忆 ,弹出对话框,单击 是 ,保存标定开始点位。
-
-
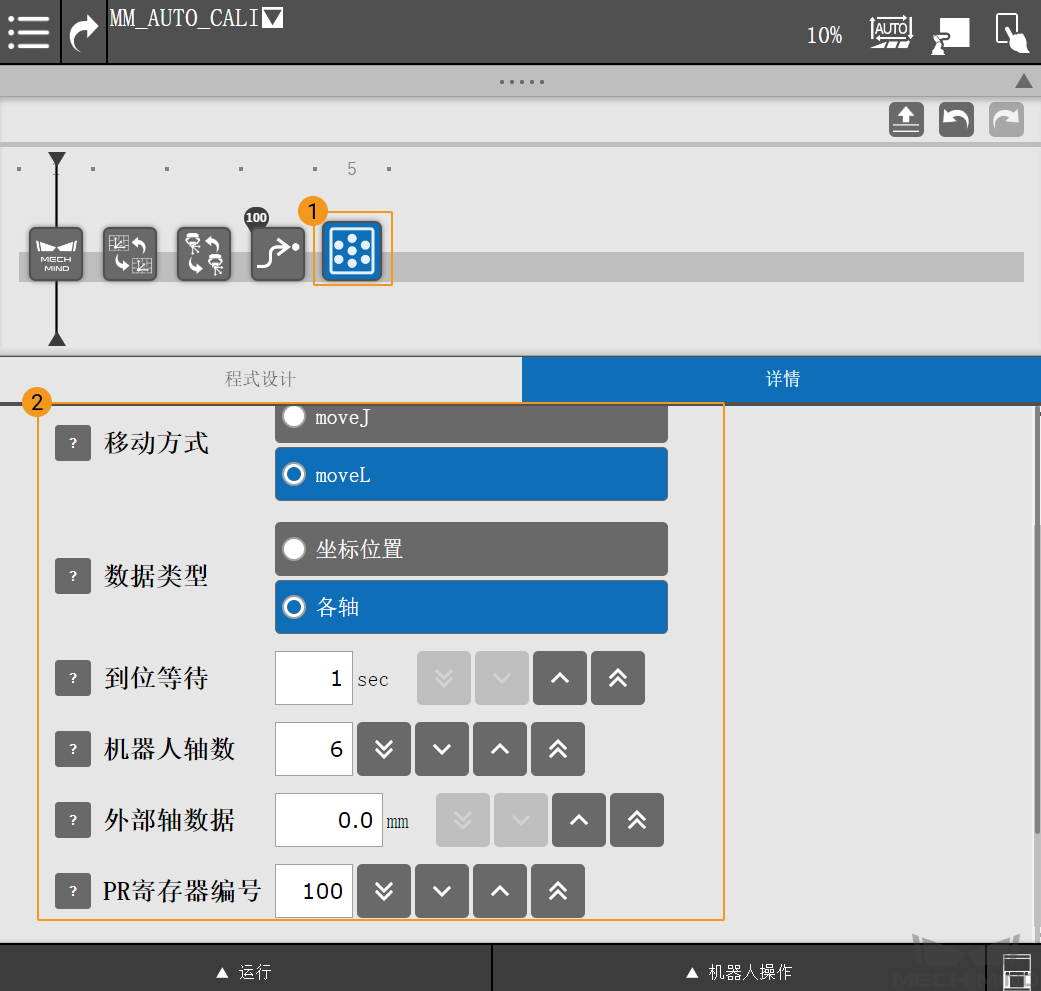
单击 Mech-Eye 相机标定 ,按下图所示设置参数。
-
移动方式:自动标定过程,机器人的移动方式。
-
数据类型:机器人发送的点位类型。
-
到位等待:设置拍照延迟时间,防止机器人到位后抖动。
-
位置寄存器编号:需要设置为上一步存储标定起始点位置的寄存器编号。
-