样例程序2:MM_S2_Viz_Basic
程序解读
以下为MM_S2_Viz_Basic样例程序的梯形图及相关解释说明。

上述样例程序梯形图对应的流程如下图所示。
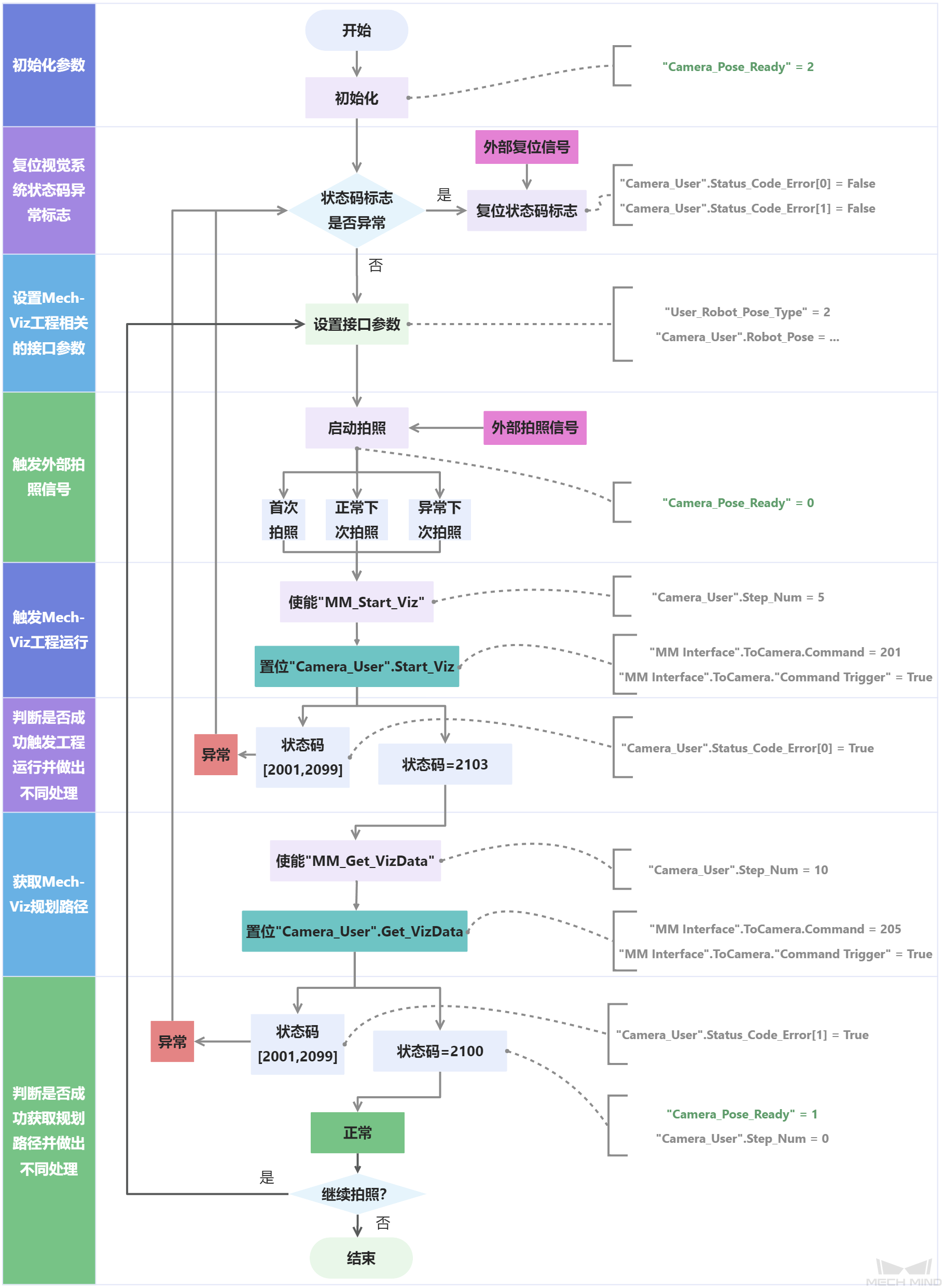
下表为上述程序的逻辑解读。
|
| 流程 | 梯形图及说明 | ||
|---|---|---|---|
初始化参数 |
因此,Network 1表示仅在"MM Interface".FromCamera."Status Code"等于0,且P_TRIG检测到上升沿时,将"Camera_Pose_Ready"初始化为2。 |
||
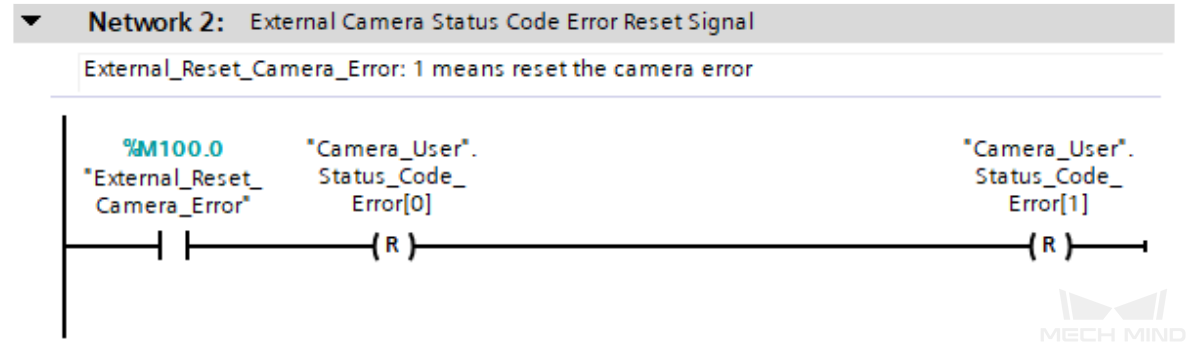
复位视觉系统状态码异常标志 |
因此,Network 2表示"External_Reset_Camera_Error"导通时,复位"Camera_User".Status_Code_Error[0]和"Camera_User".Status_Code_Error[1],将"Camera_User".Step_Num赋值为0。 |
||
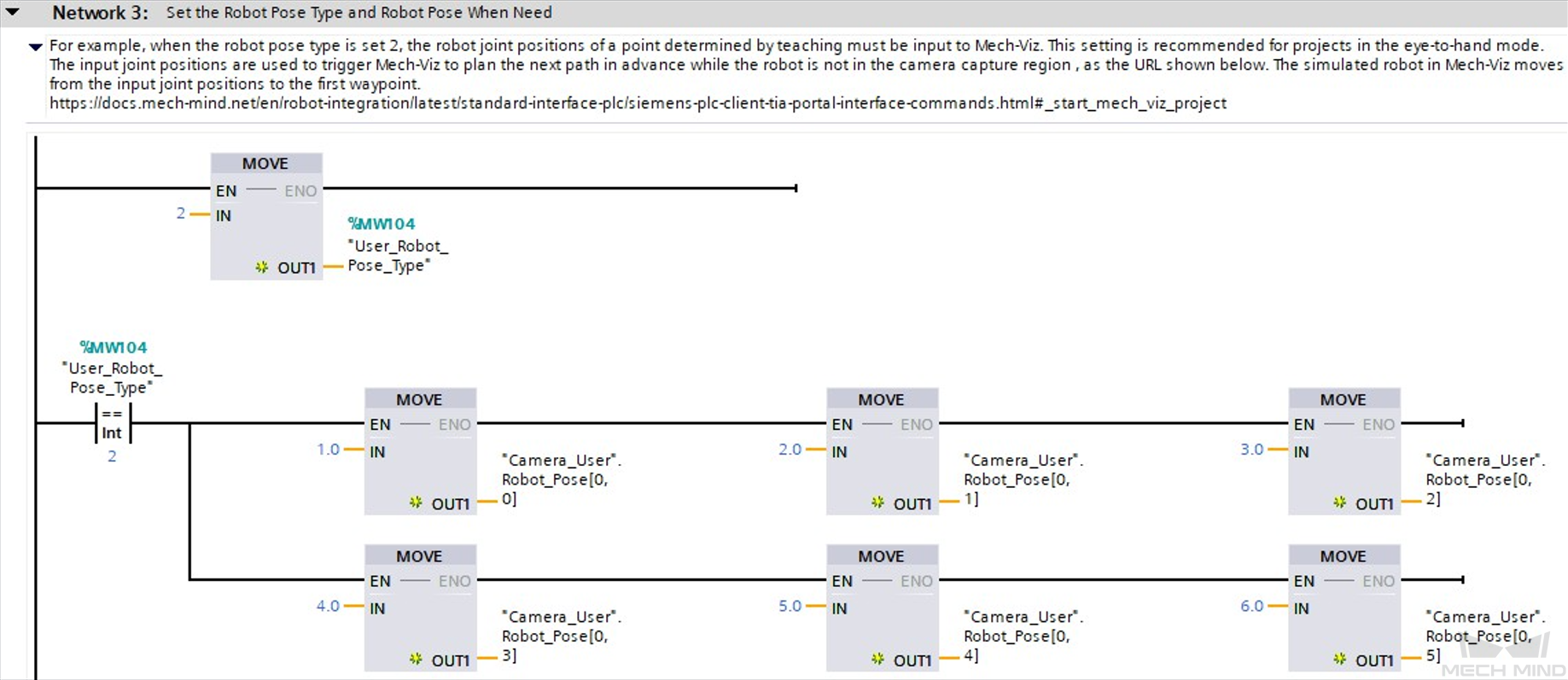
设置Mech-Viz工程相关的接口参数 |
因此,Network 3表示,若"User_Robot_Pose_Type"等于2,则将"Camera_User".Robot_Pose[0,0]~[0,5]依次设置为1.0、2.0、3.0、4.0、5.0、6.0。 |
||
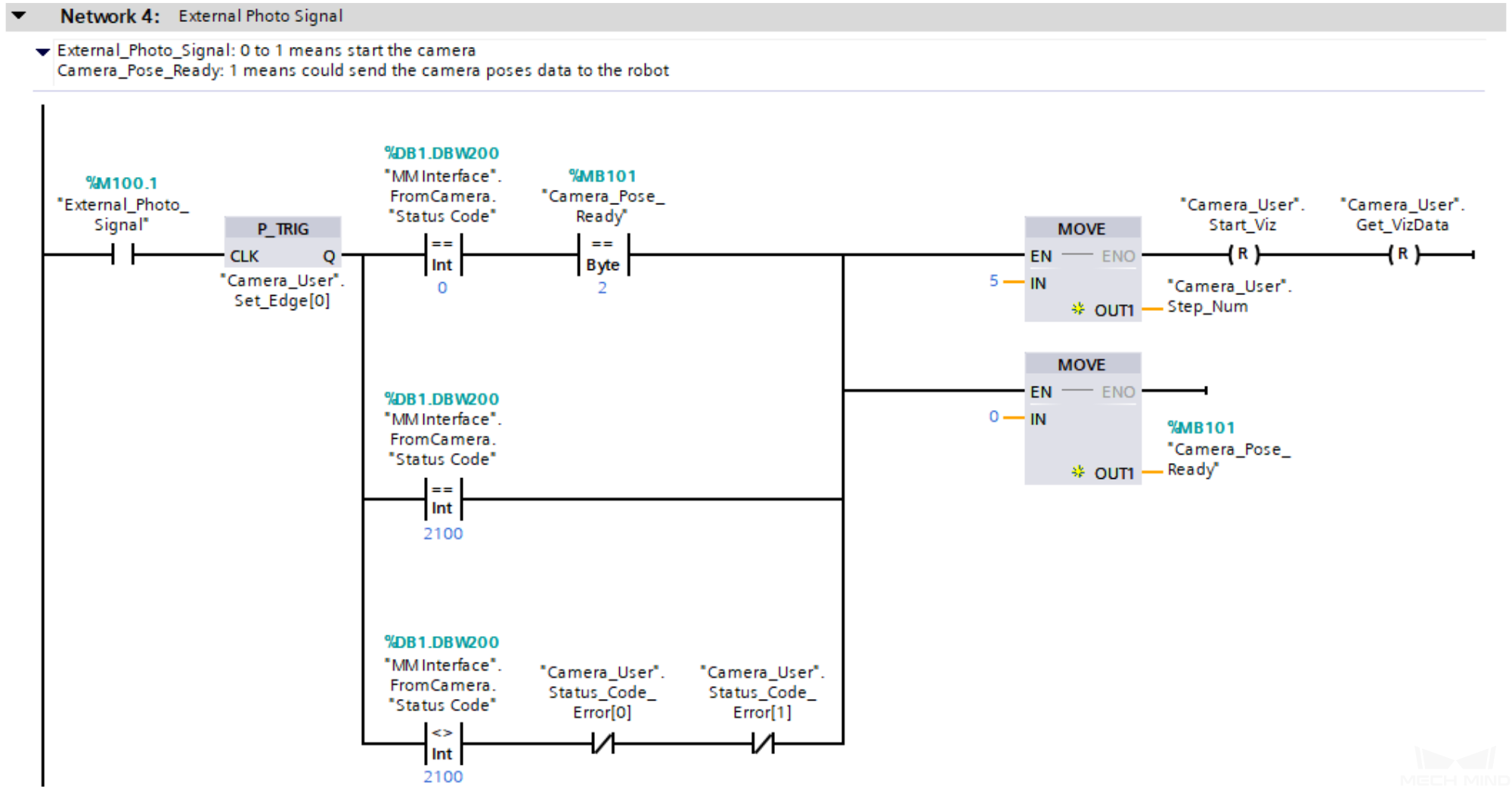
触发外部拍照信号 |
因此,Network 4表示获取外部拍照信号"External_Photo_Signal"上升沿,串联如下三种拍照场景。
最后,将"Camera_User".Step_Num赋值为5,并复位"Camera_User".Start_Viz和"Camera_User".Get_VizData;同时将"Camera_Pose_Ready"赋值为0。 |
||
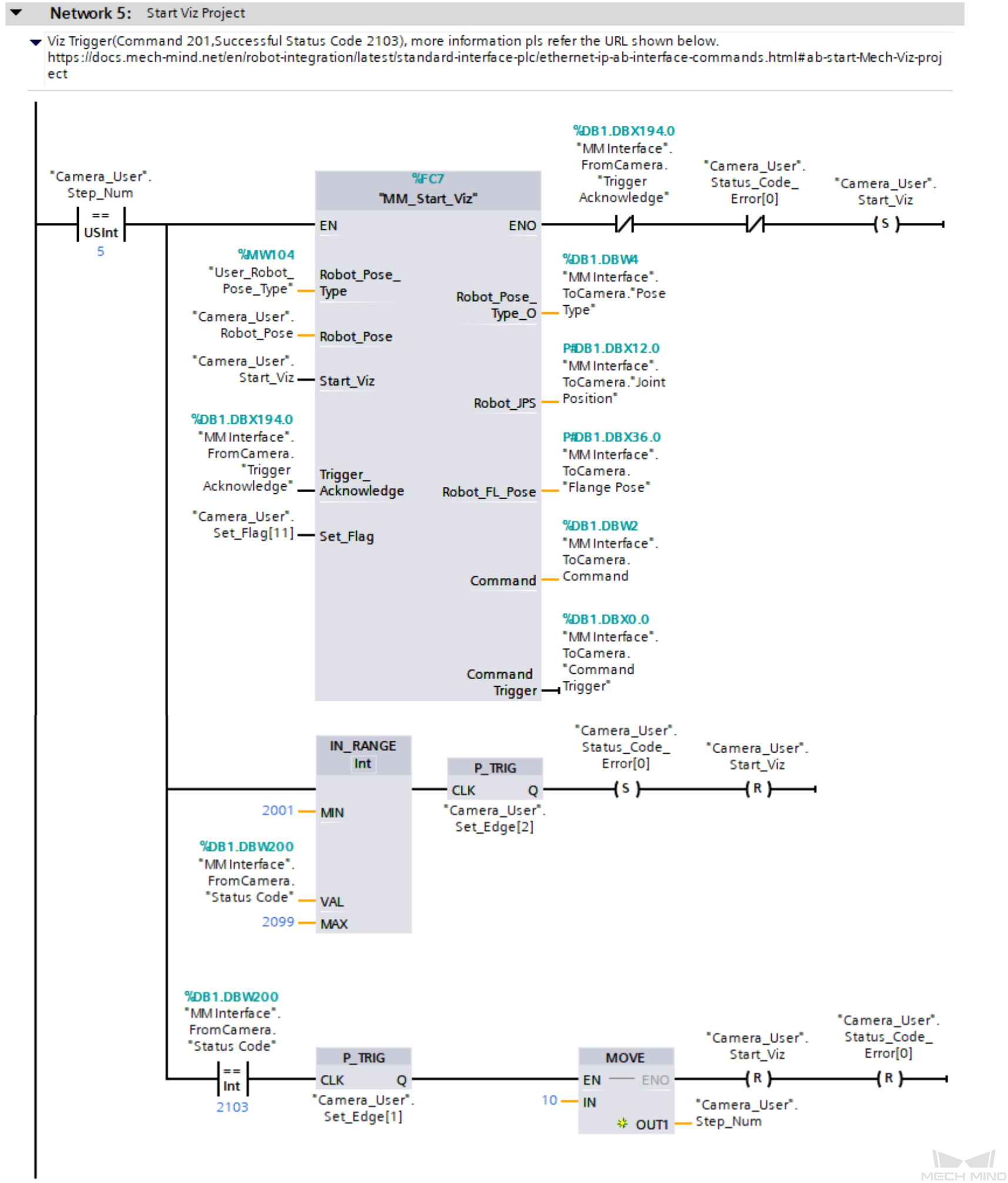
触发Mech-Viz工程运行,并判断是否成功触发工程从而做出不同处理 |
Network 5表示,若"Camera_User".Step_Num等于5,则执行以下逻辑。
|
||
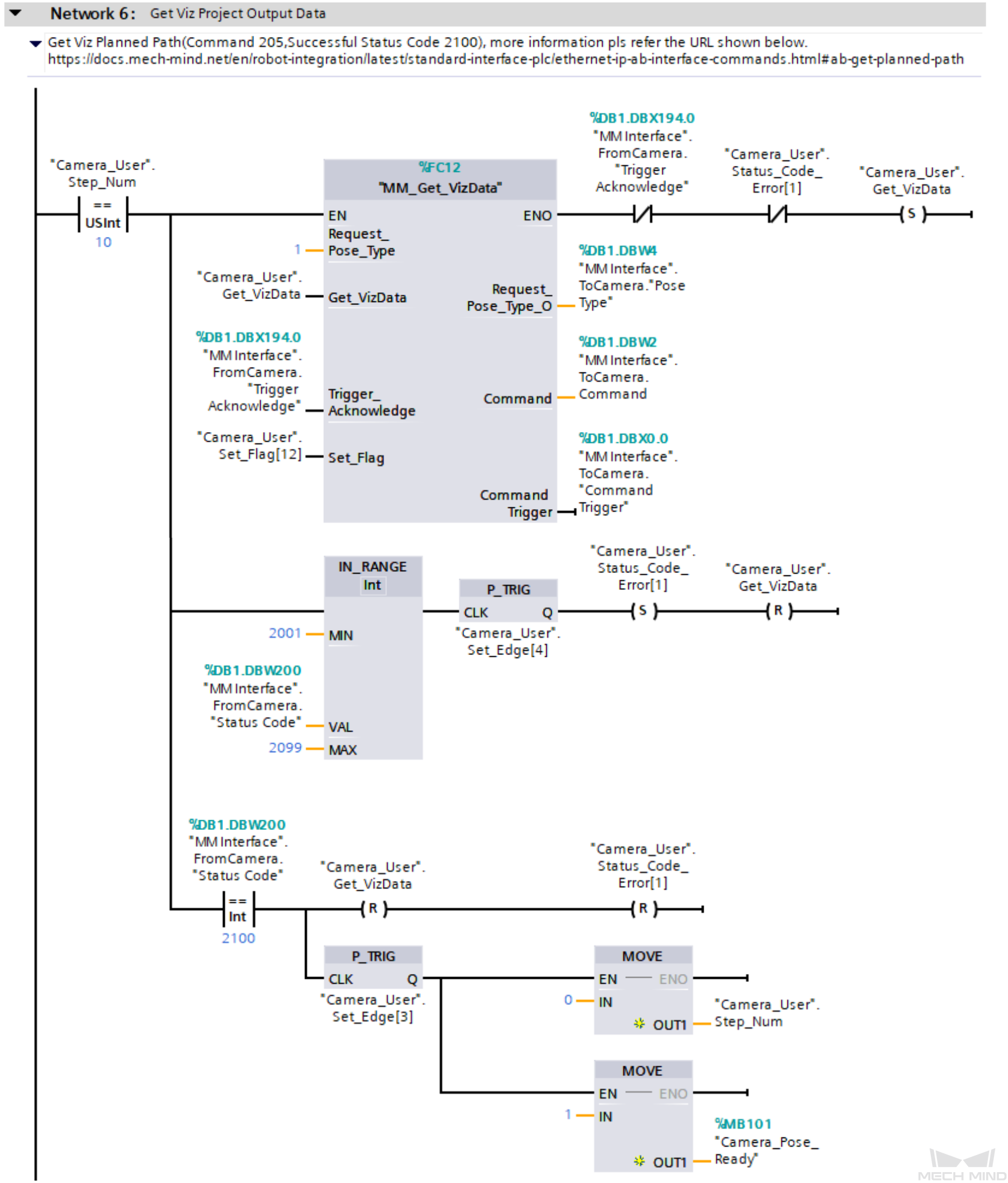
获取Mech-Viz规划路径,并判断是否成功获取规划路径从而做出不同处理 |
Network 6表示,若"Camera_User".Step_Num等于10,则执行以下逻辑。
|