主控通信配置
本节介绍如何配置DENSO主控通信。
准备工作
检查控制器及软件版本
|
本文所列的型号与版本是适配时所用的型号与版本。对于其他型号与版本,用户可参考本文尝试操作,若遇到问题,请联系梅卡曼德技术支持。 |
-
控制器型号:RC8、RC8A或RC9。
-
控制器软件版本:2.15.0。
点击查看操作方法
-
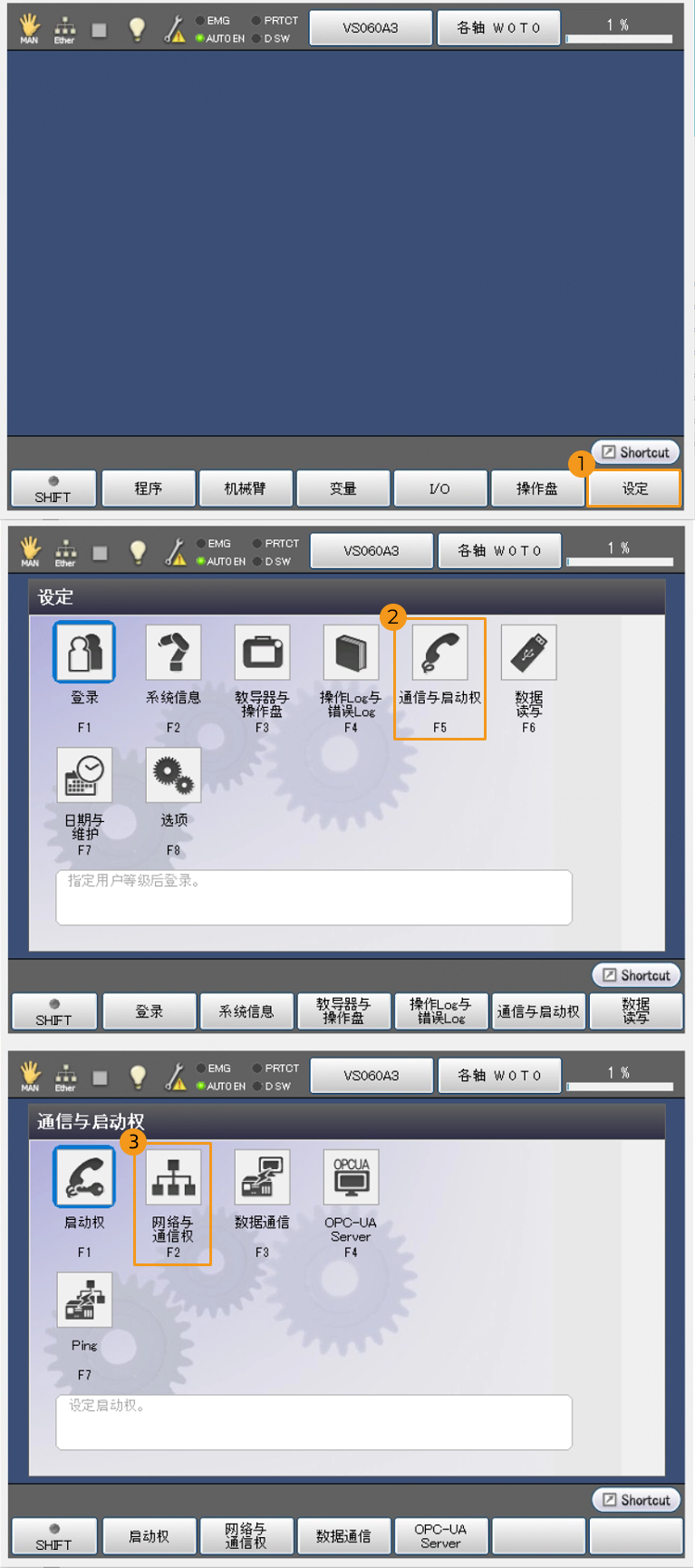
在示教器上,点击。

-
查看Controller type和控制器软件。

-
下载并打开机器人软件
请在工控机上访问DENSO机器人官网,根据提示下载并安装机器人软件WINCAPS lll。安装WINCAPS lll软件后,双击打开WINCAPS lll。
建立网络连接
-
将工控机网线的另一端连接到机器人控制柜的以太网接口。
-
查看机器人IP地址,并确认机器人IP地址和工控机IP地址是否在同一网段。
点击查看操作方法
-
在示教器上,点击。
-
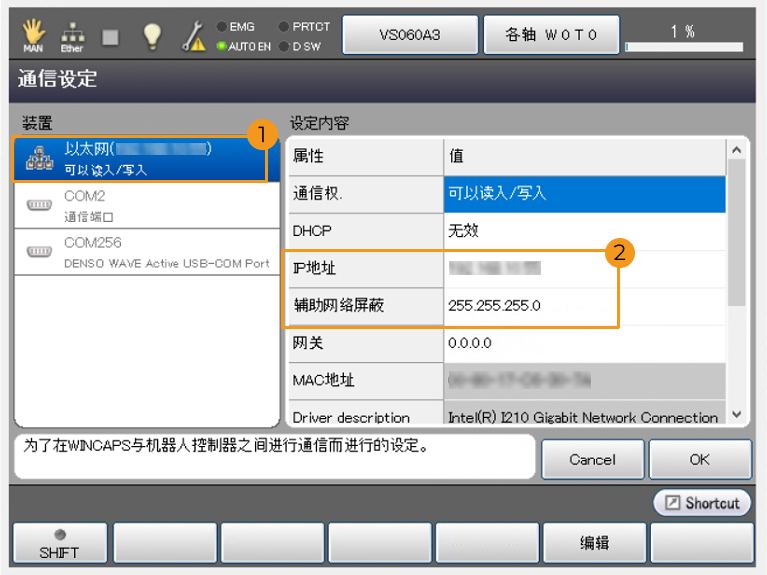
在“通信设定”窗口的“装置”面板,选择以太网,在“设定内容”面板查看IP地址和辅助网络屏蔽。
-
-
如果机器人IP地址与工控机IP地址不在同一网段,请修改工控机IP地址。
获取机器人控制权
完成本节配置后,梅卡曼德视觉系统将获得机器人控制权,能够与机器人进行主控通信。
修改机器人程序文件(仅RC9控制器)
Mech-Vision和Mech-Viz提供的机器人适配程序文件默认对RC8控制器生效。如果需要使用RC9控制器,请执行以下步骤修改程序文件。
-
在工控机上,打开Mech-Vision & Mech-Viz安装目录,进入
Communication Component\Robot_Server\src\robot\denso文件夹,里边有以下文件:-
__init__
-
cao_controller
-
denso_robot
-
denso_robot_adapter
-
-
打开denso_robot_adapter文件,将RC8修改成RC9并保存。

-
打开cao_controller文件,将RC8修改成RC9并保存。

测试主控通信
创建Mech-Viz工程
-
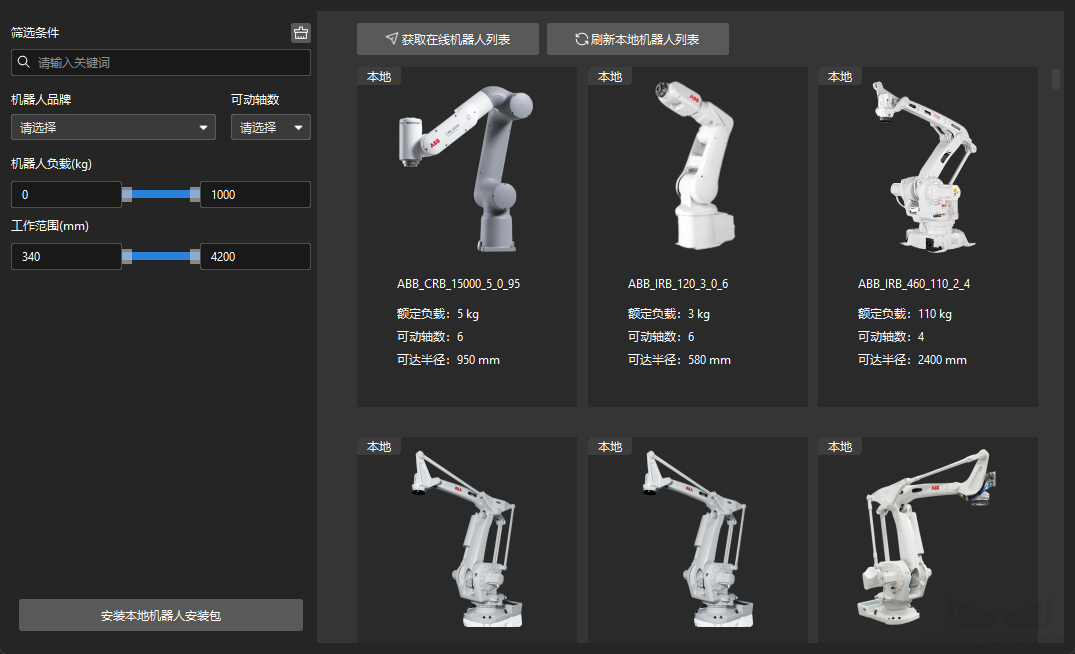
打开Mech-Viz软件,按下键盘上 Ctrl + N(新建工程)。在如下界面中,根据真实机器人的品牌和型号,选择对应的机器人模型。
-
按下键盘上 Ctrl + S,创建或选择文件夹,以保存工程。
-
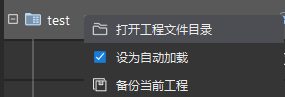
在Mech-Viz软件的左侧窗口中,右键单击工程名称,勾选 设为自动加载。
连接机器人
-
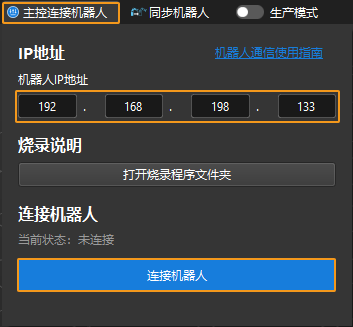
在Mech-Viz软件中,单击工具栏中的 主控连接机器人。
-
在 机器人IP地址 处,填入真实机器人的IP地址(图中的IP地址仅为示意),单击 连接机器人。
若Mech-Viz成功连接真实机器人,则当前状态显示 已连接,同时,工具栏中的图标由蓝色变为绿色。
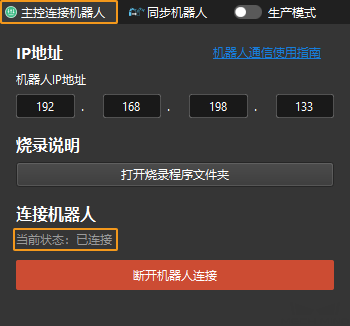
若连接失败,请检查设置的机器人IP地址是否有误。
移动机器人
-
在Mech-Viz软件中,将工具栏中的速度与加速度调整为5%。

-
在工具栏中,单击 同步机器人,使其处于选中状态,此时三维仿真空间中的虚拟机器人位姿将同步为真实机器人位姿,然后再次单击 同步机器人,以取消选中状态。

-
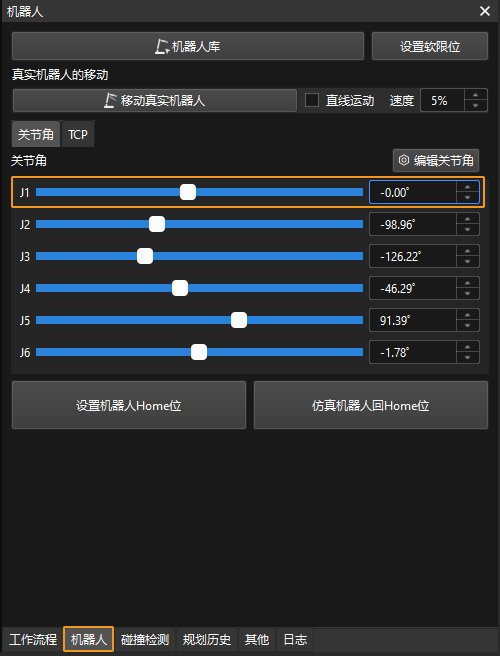
在 机器人 选项卡下,微调 J1 关节角角度(例如,将 0° 调整为 3°)。此操作将使虚拟机器人发生移动。
-
单击 移动真实机器人 ,确认真实机器人是否移动。如果真实机器人移动至虚拟机器人的位姿,则说明主控通信正常。
在运行机器人时,请确保人员安全。当发生紧急情况时,请按下示教器上的急停按钮! 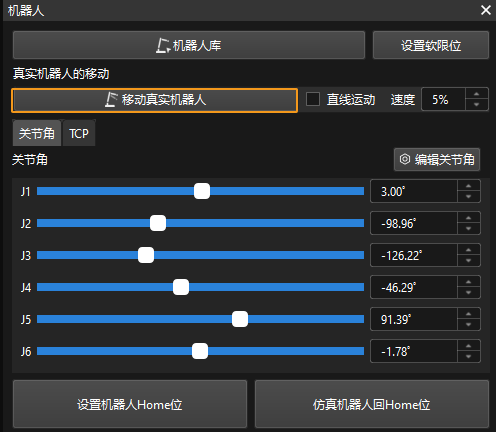
|