DENSO(电装)
本节介绍如何配置DENSO主控通信。
准备工作

下载并打开机器人软件
请在工控机上访问DENSO机器人官网,根据提示下载并安装机器人软件WINCAPS lll。安装WINCAPS lll软件后,双击打开WINCAPS lll。
建立网络连接
-
将工控机网线的另一端连接到机器人控制柜的以太网接口。
-
查看机器人IP地址,并确认机器人IP地址和工控机IP地址是否在同一网段。
点击查看操作方法
-
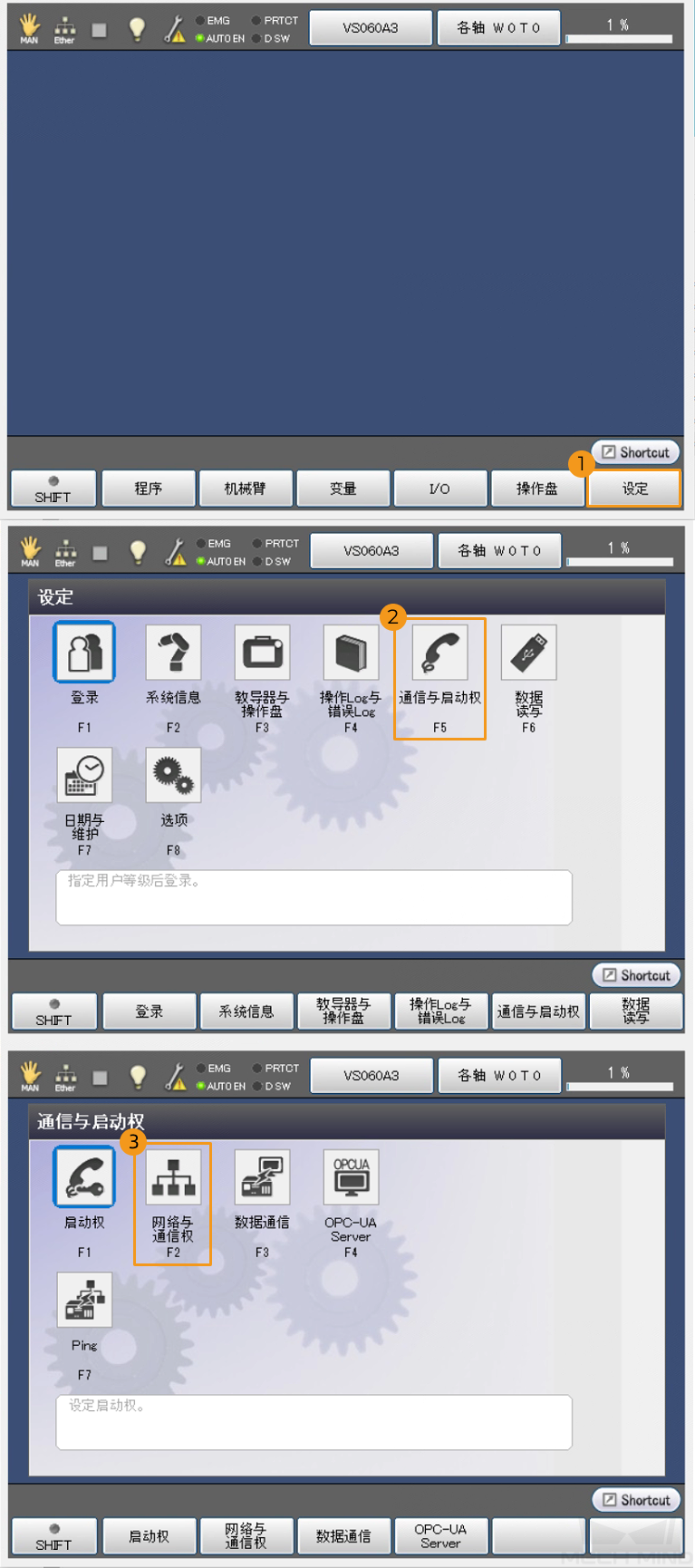
在示教器上,点击。
-
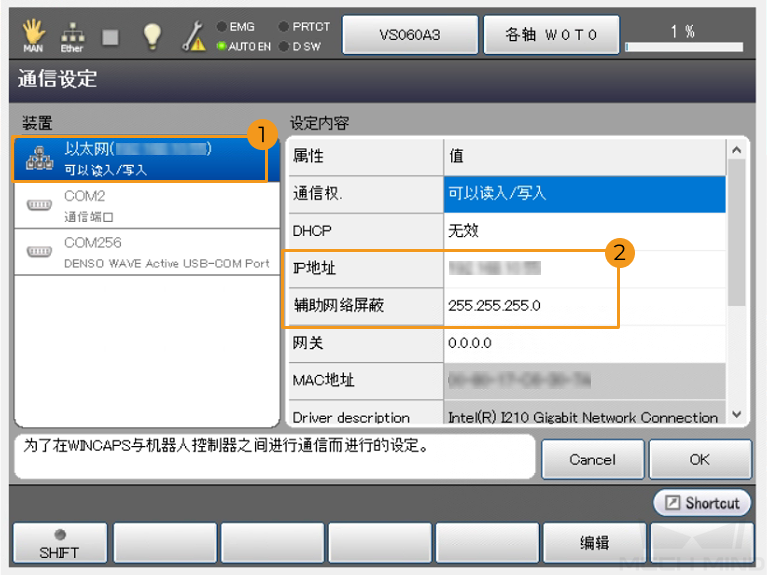
在“通信设定”窗口的“装置”面板,选择以太网,在“设定内容”面板查看IP地址和辅助网络屏蔽。
-
-
如果机器人IP地址与工控机IP地址不在同一网段,请修改工控机IP地址。
获取机器人控制权
完成本节配置后,梅卡曼德视觉系统将获得机器人控制权,能够与机器人进行主控通信。
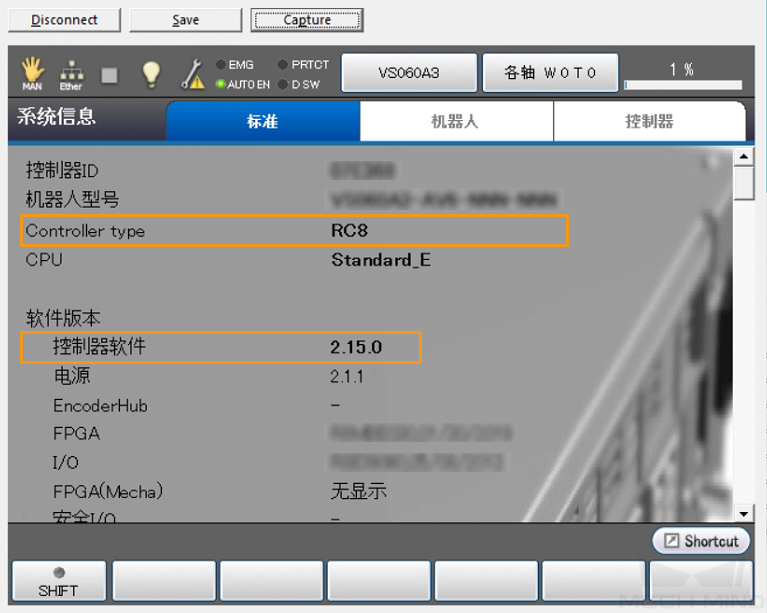
修改机器人程序文件(仅RC9控制器)
Mech-Vision和Mech-Viz提供的机器人适配程序文件默认对RC8控制器生效。如果需要使用RC9控制器,请执行以下步骤修改程序文件。
-
在工控机上,打开Mech-Vision & Mech-Viz安装目录,进入
Mech-Center\Robot_Server\src\robot\denso文件夹,里边有以下文件:-
__init__
-
cao_controller
-
denso_robot
-
denso_robot_adapter
-
-
打开denso_robot_adapter文件,将RC8修改成RC9并保存。

-
打开cao_controller文件,将RC8修改成RC9并保存。

测试主控通信
请参阅 测试机器人连接状态。
|