DOBOT(越疆)
本节介绍如何主控 DOBOT 机器人。
设置网络连接
配置 IP
工控机 IP 需与机器人 IP 位于同一网段,即两者 IP 地址的网络部分和子网掩码需相同,例如 192.168.100.2/255.255.255.0 和 192.168.100.3/255.255.255.0 位于同一网段。
-
设置工控机 IP 地址 。
-
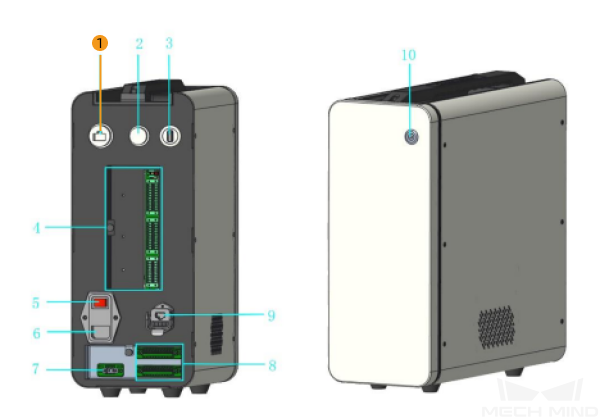
设置机器人 IP 地址。
-
若机器人控制软件为 DobotSCStudio,则按如下操作设置 IP 地址。
在 DobotSCStudio 中,依次点击。
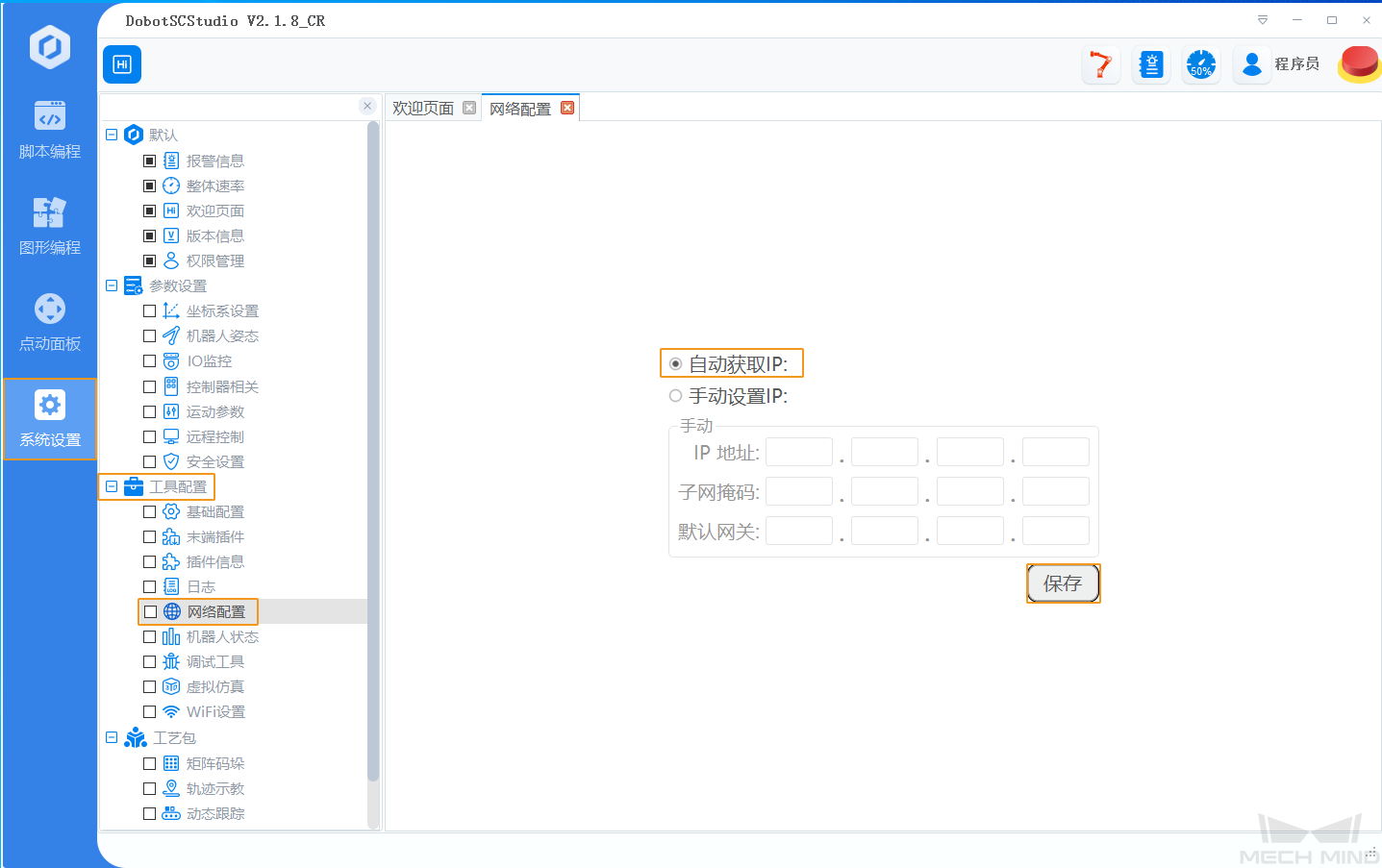
若机器人 IP 与工控机 IP 不在同一网段,选择 手动设置 IP 以手动设置机器人 IP,然后进行保存。 -
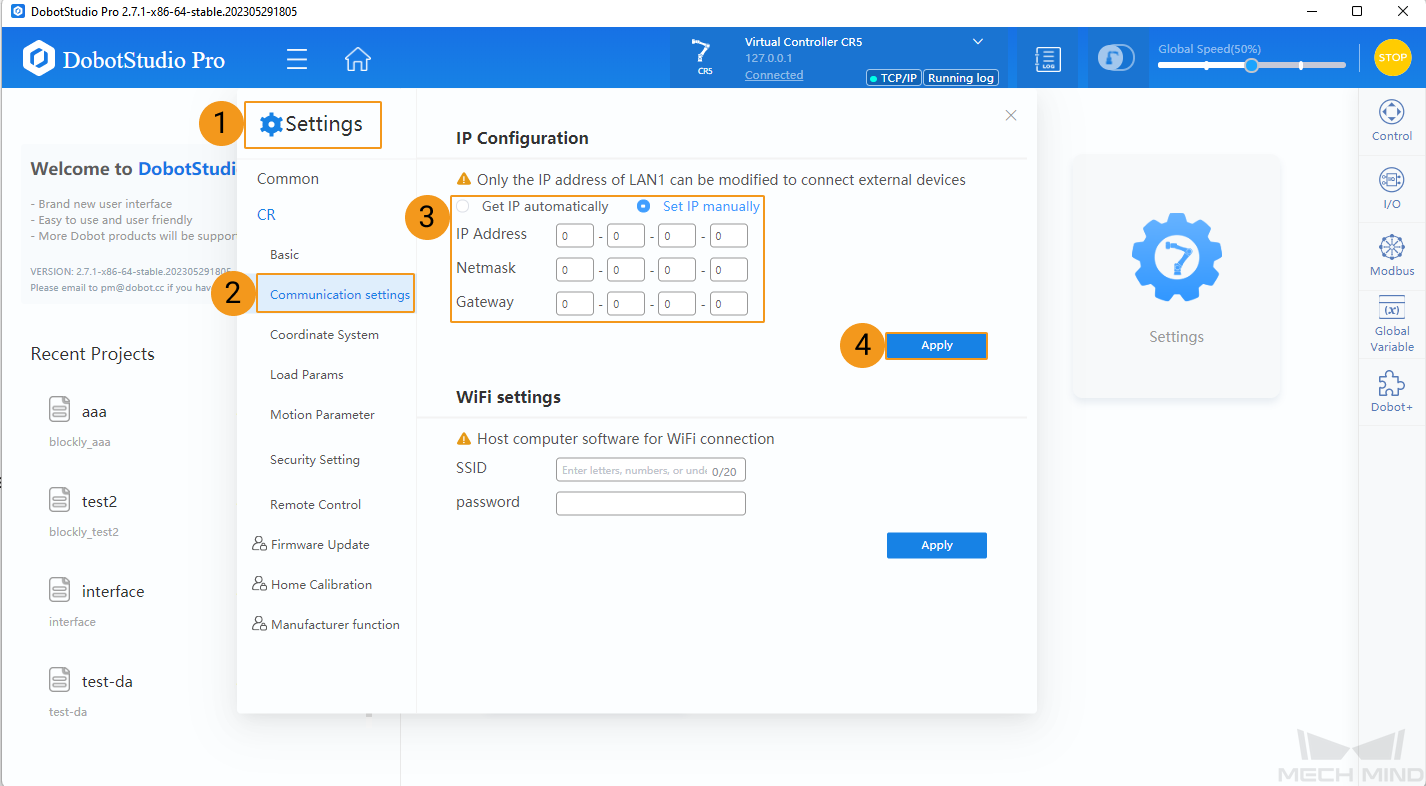
若机器人控制软件为 DobotStudio,则按如下操作设置 IP 地址。
在 DobotStudio 中,依次点击,填写 IP 地址、子网掩码、默认网关,然后点击 应用。
-
注意事项
-
请勿同时使用 Mech-Viz 和 DobotSCStudio/DobotStudio。否则,Mech-Viz 可能无法与机器人通信。
-
请勿同时使用 Mech-Viz 和示教器操作机器人。
-
连接在控制器上的 Wi-Fi USB 设备可能会影响远程控制,建议将其移除。
-
在主控 DOBOT 机器人时,程序运行过程中Mech-Viz不支持设置机器人TCP。因此,用户需提前确保机器人端的TCP值和Mech-Viz中设置的TCP值一致。若两者不一致,则真实机器人直线运动路径与Mech-Viz规划路径不一致。用户可进行如下操作使两者TCP值一致:
-
手动修改机器人端的 TCP 值,使其与 Mech-Viz 中设置的 TCP 值保持一致;
-
使能机器人;
-
Mech-Center重新连接机器人。
-
-
越疆机器人的实际 DI 与Mech-Viz中的 DI 存在一位偏移,即Mech-Viz中的 DI0 对应真实机器人的 DI1。
测试机器人连接状态
请参阅 测试机器人连接状态 。