Hyundai (现代)
本节介绍如何主控 Hyundai 机器人。
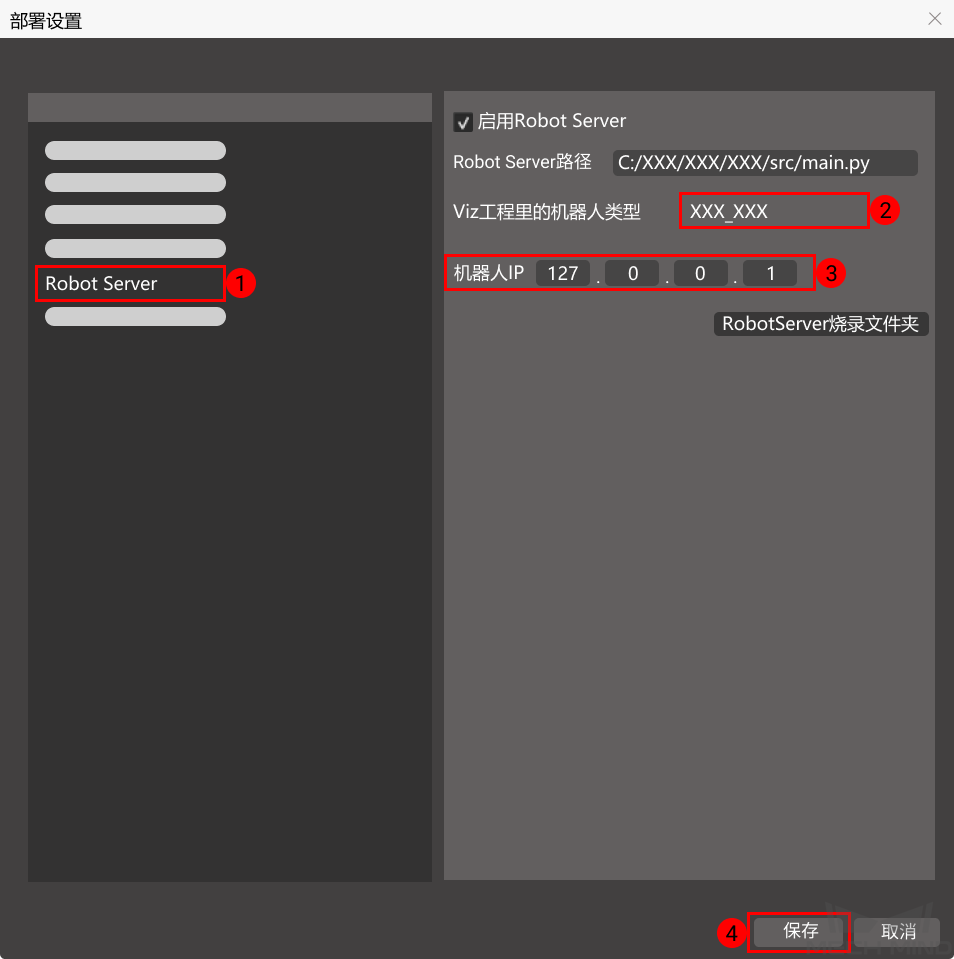
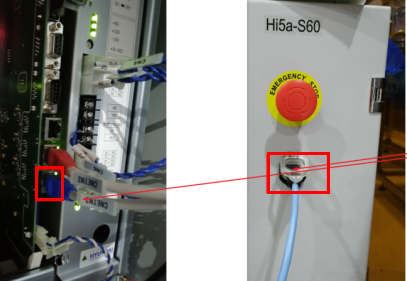
建立网络连接
烧录文件至机器人中
-
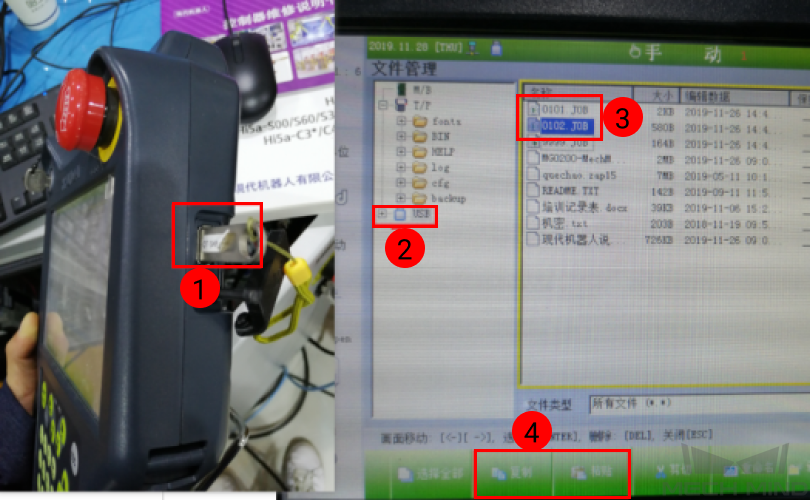
将 U 盘插入示教器中。
烧录文件 0101.JOB 与 0102.JOB 需修改首行 Program File Format Version 。
如机器人中有已有程序,可直接跳至第五步。 -
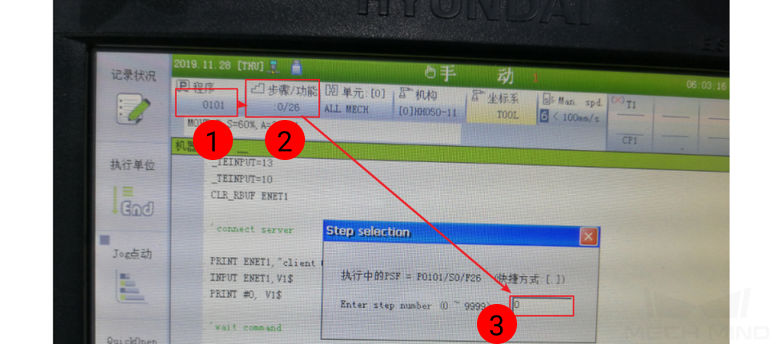
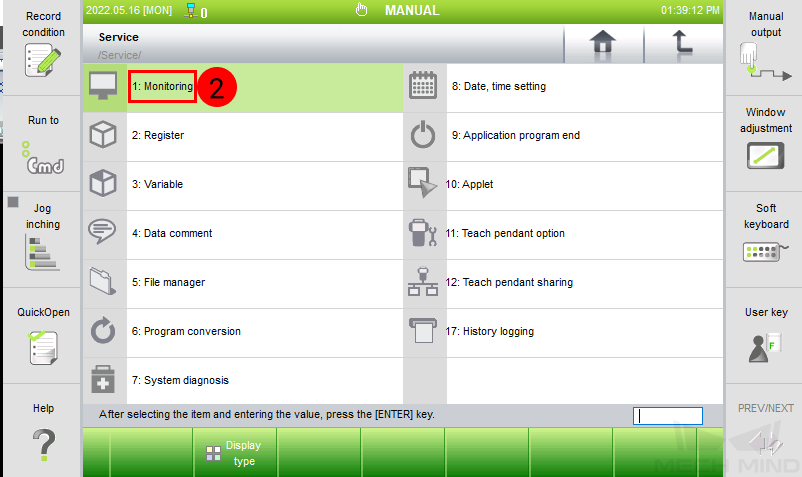
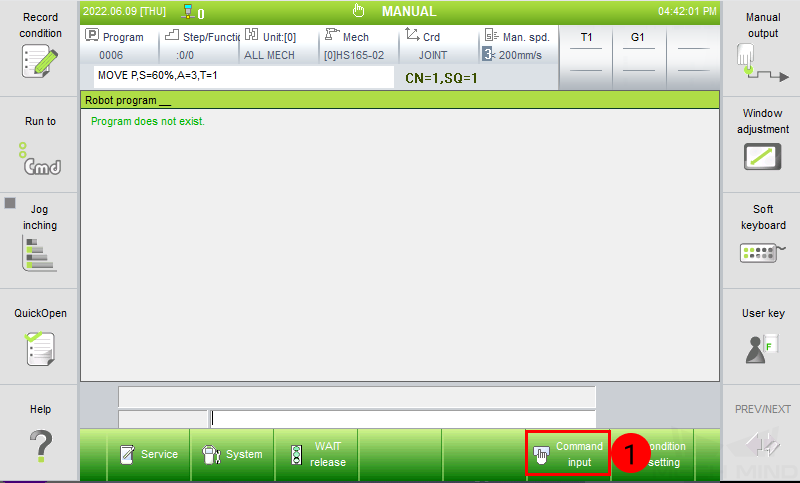
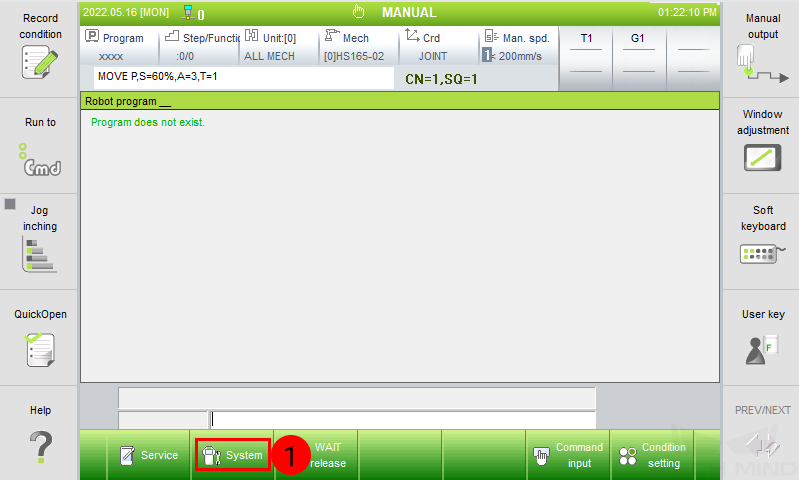
单击 Command input 。
-
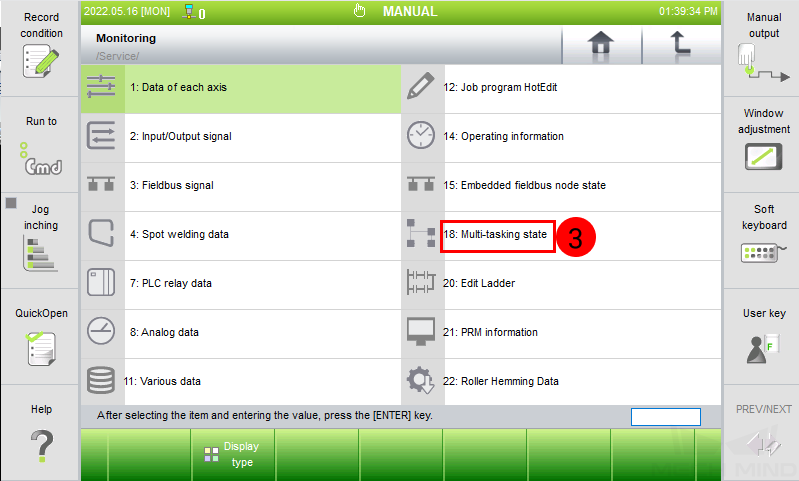
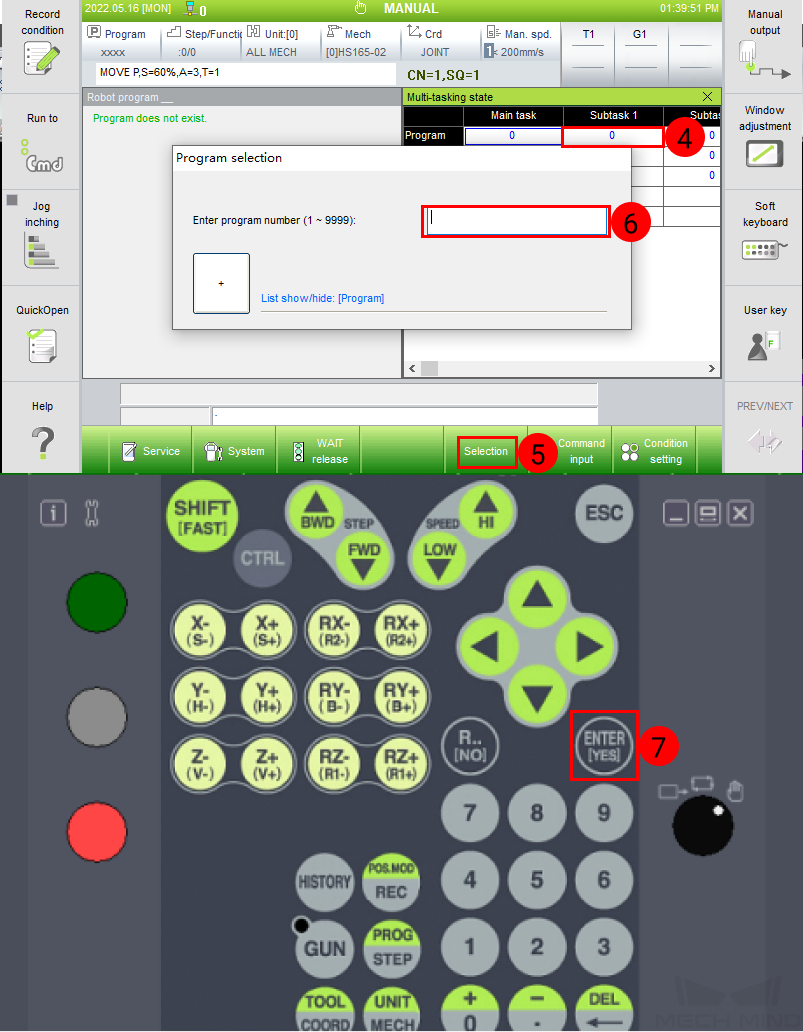
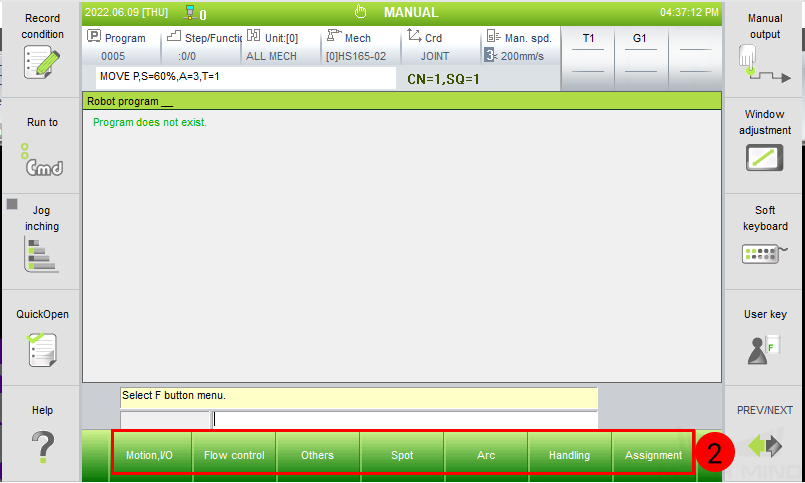
选择任一指令,如下图所示。
-
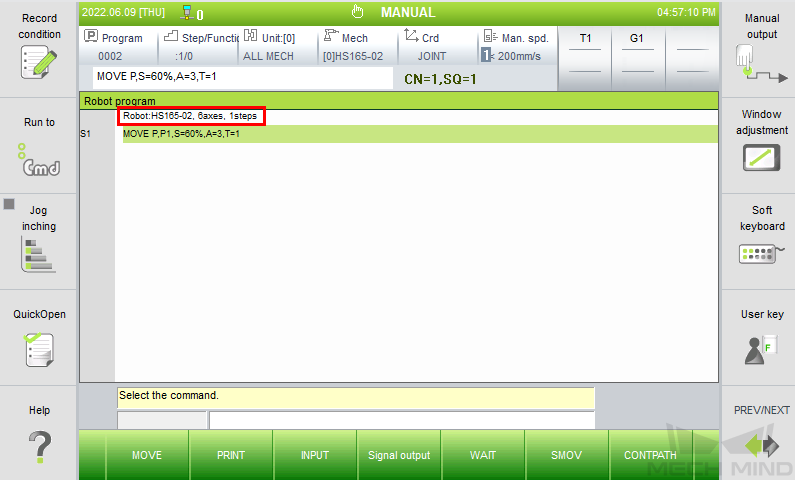
此时可看到机器人版本信息,保存程序。
-
选择新建工程文件(或以前工程文件),单击 Copy ,然后切换至 USB 文件夹,单击 Paste ,拷贝完成,拔下 U 盘。
-
将 U 盘插入工控机中,打开新建工程中除 0101.JOB 和 0102.JOB 外的任一文件,并复制首行。
-
打开 Hyundai 机器人烧录文件 0101.JOB 和 0102.JOB (位于梅卡曼德系统软件安装目录下
Mech-Center/Robot_Server/Robot_FullControl/hyundai/Hi5a-S),粘贴并替换首行信息,并保存。
-
复制 0101.JOB 和 0102.JOB 至 U 盘中。将 U 盘插入示教器中,依次单击,选中 0101.JOB 和 0102.JOB 文件,单击 Copy ,然后切换至 T/P 文件夹,单击 Paste ,文件烧录至机器人中。
烧录后的操作
-
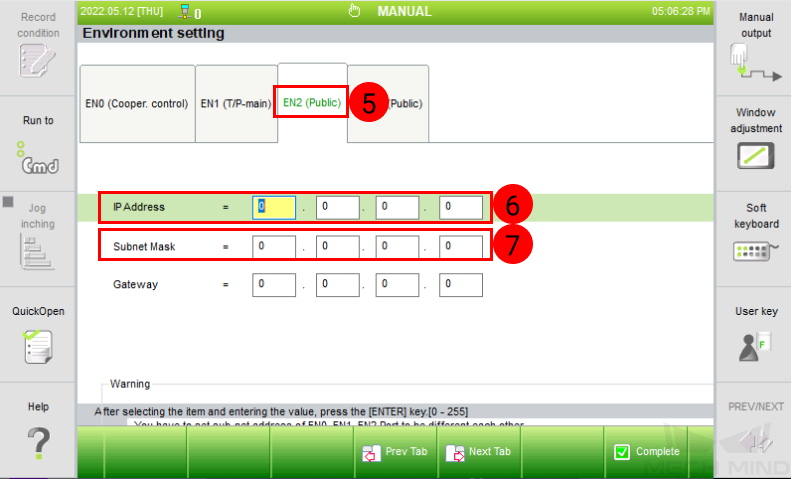
将工控机 IP 地址改为 192.168.0.150(默认IP)。
-
此 IP 与 0101.JOB 和 0102.JOB 文件关联。如更改,也需更改 101 和 102 程序内容。
-
机器人 IP 地址需与工控机 IP 地址在同一网段。
-
-
将路由器的管理 IP 改为 192.168.0.1。
-
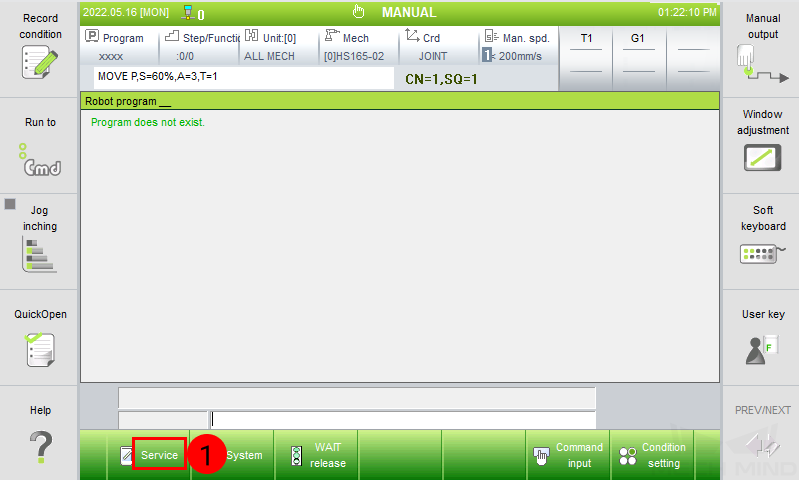
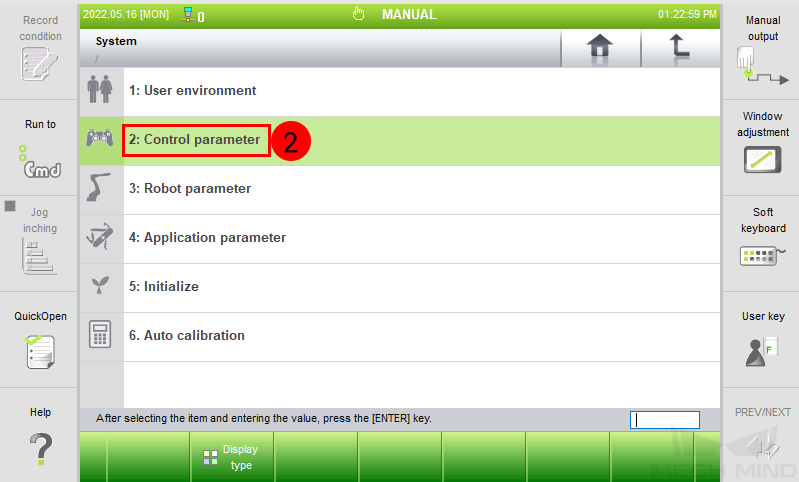
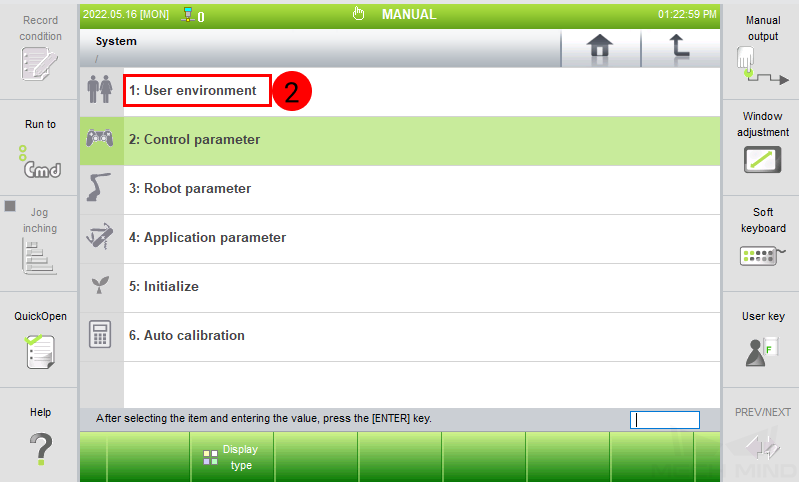
单击进入用户环境页面。
-
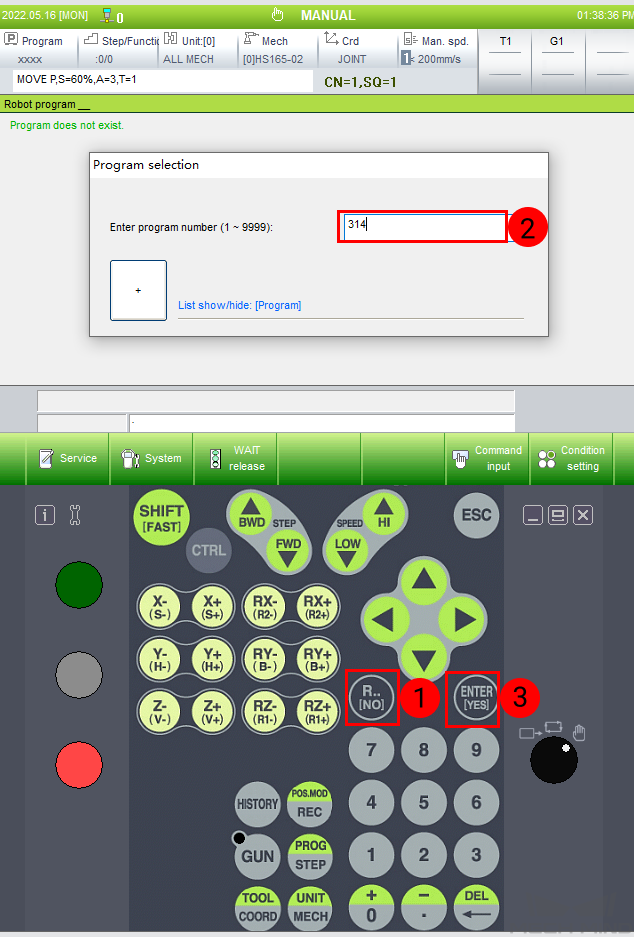
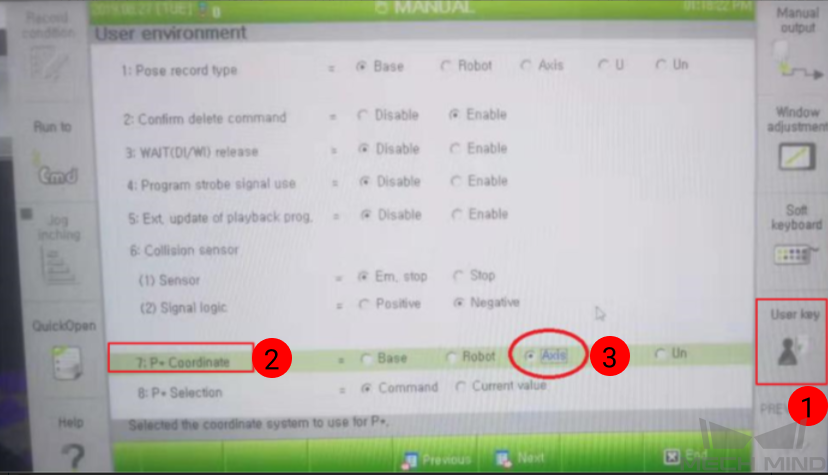
单击 User key ,输入 314 (通用权限密码),可获得授权。
-
修改 P Coordinate* 关节信息,选择 Axis 。
-
直接在屏幕上选中 Axis 。
-
按住示教器上
SHIFT,同时按住左右键,向左或向右移动。
如未修改关节信息,后台出现如下报错。

-